1. Background
As you may know, my final project of this class is "FabTurtle", that is a robot (prototype) not only for drawing, but also for cutting and milling something large according to LOGO language. The original idea was come from Seymour Papert's very famous Turtle Robot. Honestly, my first experience of progamming was LOGO language! I got my personal computer when I was around 8 years old. I used to be absorbed in drawing anything on the screen. It's my first encounter to the computational world, and also critical turning point of my life.
Aside from my personal story, the history of Turtle Robot, Turtle Graphics, and LOGO language is here:
http://cyberneticzoo.com/?p=1711
http://en.wikipedia.org/wiki/Logo_%28programming_language%29
Moreover, we know there are a lot of famous robot inventions. Machina Speculatrix(by Grey Walter),Mindstorms(by Seymour Papert,Mitchel Resnick et al.), Roomba(by Rodney Brooks), CarlyBot(by Phil Frei, Victor Su and Hiroshi Ishii), and so forth.
Compare to them, there are two things I tried to add to those robots.
The one is function. I wanted to make them evolve- from "Drawing" robots to "Fabricating" robots. Actually I am on the way to testify the feasibility of cutting and milling something.
The other is mechanics. I have been sticking to the novel way of omni-directional movements. I'm going to describe about that.
2. Omni Ball/ Omni Wheel
There are two components for movement in omni-directions. The one is "omni-wheel". Below are a few of the available omni-wheels on the market. The wheel size, diameter and material are dependent on things like expected robot speed, weight, etc. In general, plastic is too smooth and the wheels were not getting much ground traction. Instead you should make sure the small peripheral wheels are made out of some high traction material, such as rubber or polyurethane(60) .

(from http://www.societyofrobots.com/robot_omni_wheel.shtml)
One problem of omniwheel is that robot cannot go over big gaps. To solve this problem, "Omniball" was invented. The idea of omniball is originally developed by
Dr. Kenjiro Tadakuma (Osaka University Japan).
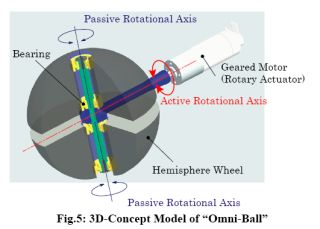
http://www-hh.mech.eng.osaka-u.ac.jp/robotics/Omni-Ball_e.html
3. FabLab-Made Process
In this class, I tried to make Omni-Ball only by using FabLab Equipments( I gave up make bearings inside of the shaft. )
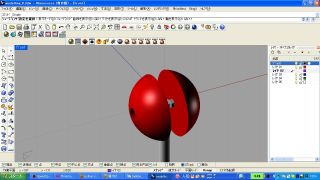
Design model1 (3dm for Rhino)
Design model2 (3dm for Rhino)
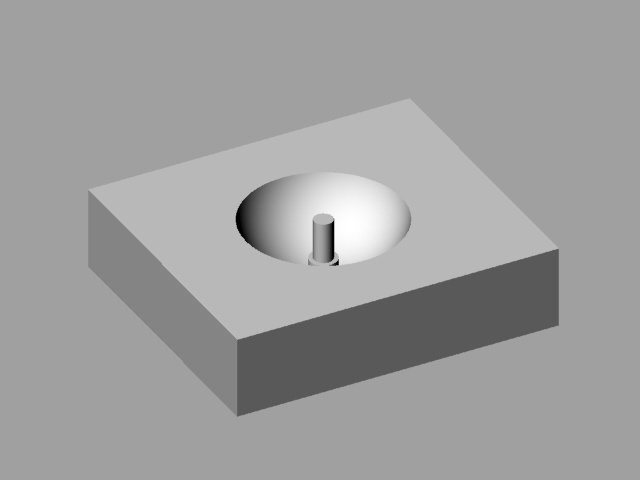
Mold model (for Modella and wax)

urethane(60) smooth-on

Pour it

Oven it

One day after

Insert shafts

Make a hole on the side of a nut

Result
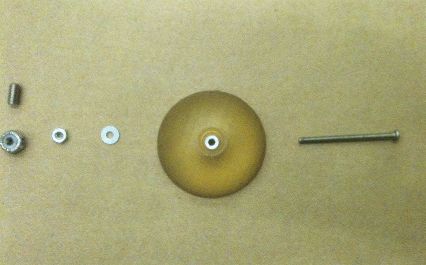
Components

Assmble
4. Useful links
http://www.societyofrobots.com/robot_omni_wheel.shtml
http://hitsh02.blog9.fc2.com/blog-entry-214.html
http://plaza.rakuten.co.jp/shinya315/diary/201008260000/
http://mitworld.mit.edu/video/564
http://www.youtube.com/watch?v=e44hA6IBtkA&feature=related