Week 0: Folding Go-Kart (Propose a Final Project)
One idea I’ve entertained for a while is to have a relatively high-performance electric go-kart that can collapse down into a small suitcase - carry on size, sort of a bastardized version of the CityCar. The kart will be powered by a pair of electric motors at 36-48v, obviating the need for a differential, and a bank of batteries running a PWM DC motor controller. I’ve built similar vehicles before, but none that were designed properly, collapsible, or had my own electronics. For example, here is a vehicle I’ve made, almost all out of wood:
The interesting thing is that we won’t seem to be doing a lot of metal machining in this class, so I may need to make this vehicle out of composites - even more exciting! Also, I’ll almost certainly have to make the motor controller from scratch. I’m looking forward to figuring out how to make a PWM motor controller with reversing contactors, and to set up a bank of FETs with proper heatsinks to handle 100A or more of current.
Anyway, on to the designing part, which is this week’s assignment. The basic idea is to make a structure that can fold upward in the middle, making it possible to fold but secured by gravity while in use. I’ll also take this opportunity to properly learn how to make multiple parts and an assembly in SolidWorks, using global variables to link dimensions across parts.
I started by modeling the overall structure of the kart as a single piece, with the rear axle pretty far back, and the front axle a little more toward the center so that there is room for foot pedals and for the steering to be in the right position. This results in a body that looks (very roughly) like the following.
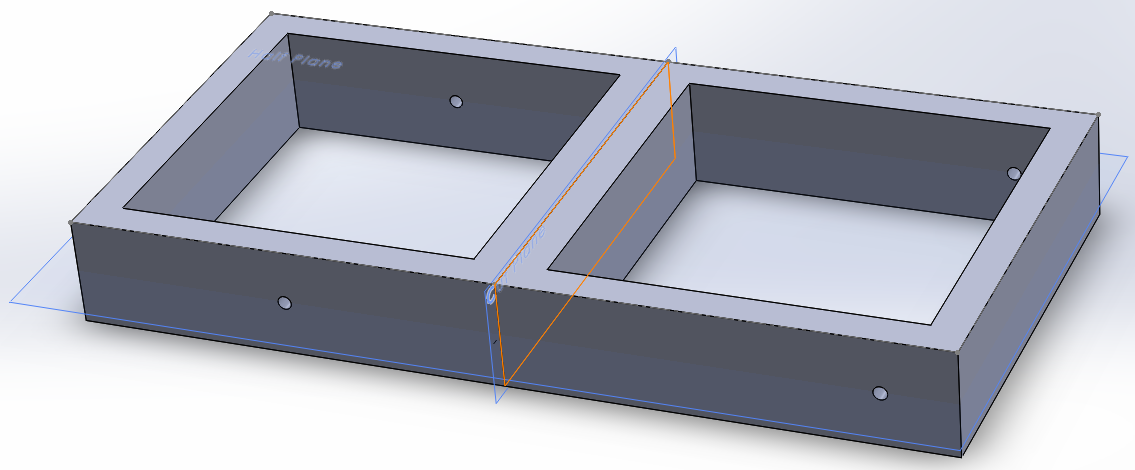
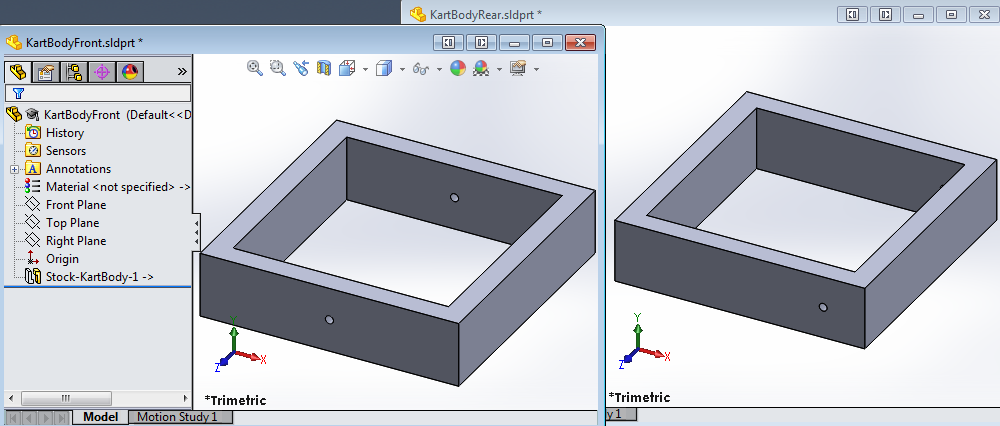
At this point, I used the Split Part feature to break the body into two pieces
for modeling in the assembly. This is useful because any changes made to the
main body propagate to the sub parts, but they can be modified independently and
used separately in an assembly.
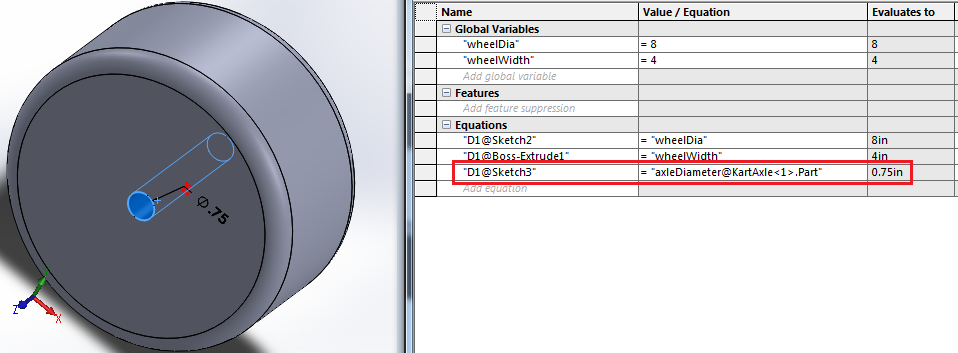
Next, I modeled an axle and wheel using global variables. It appears that
SolidWorks doesn’t allow two-way linked variables across multiple parts, so one
part needs to have a global variable that is driving the other values. In this
case, I have an axleDiameter global variable that is determining the wheel
hole and axle holes in the other parts. The equation (highlighted in red) looks
like the following, for the hole dimension on the wheel:
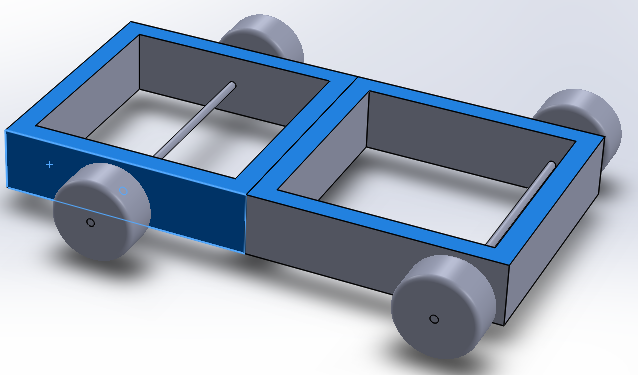
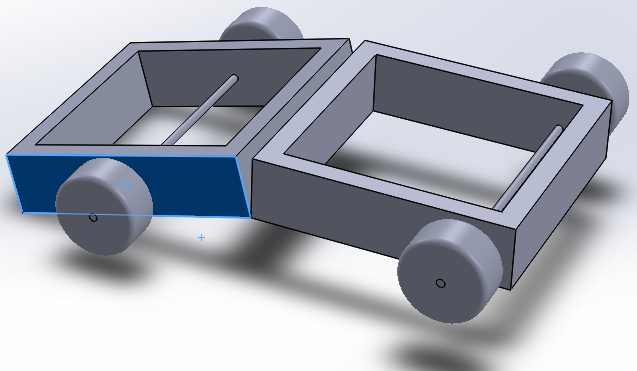
Using appropriate mates to join together the wheels, axle, and body parts in an assembly, I can get a view of the unfolded vehicle:
Here’s another view, with partial folding:
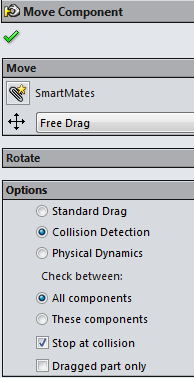
Finally, the folded vehicle below. Collision detection is helpful for determining the extents of the folding - colliding surfaces are outlined in blue.
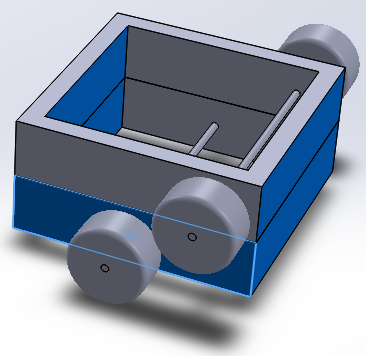
The model confirms that for this body configuration and wheel size, the wheels don’t hit each other and allow the kart to fold completely, which is great! Should I choose to pursue it as a final project, this modeling and simulation will be very helpful as I add more details to the cart to complete its design.