This week we learned how to 3D scan small objects using the Artec Eva and an electric rotary platform. We also learned how to use the Prusa MK3 extrusion-type 3D printers, and had an opportunity to submit files for fabication using one of the lab's more advanced printers, such as the Stratasys Objet 260.
We had three assignments: (1) characterize the Prusa 3D printer; (2) 3D scan something; and (3) 3D print something that specifically benefits from 3D printing technology.
Thanks to John and Tom for teaching us how to use the 3D printers and scanners!
I decided to not include the 3D scan of my hand, because it's my hand, and the raw *.stl file is 16 MB. Sorry.
printer characterization
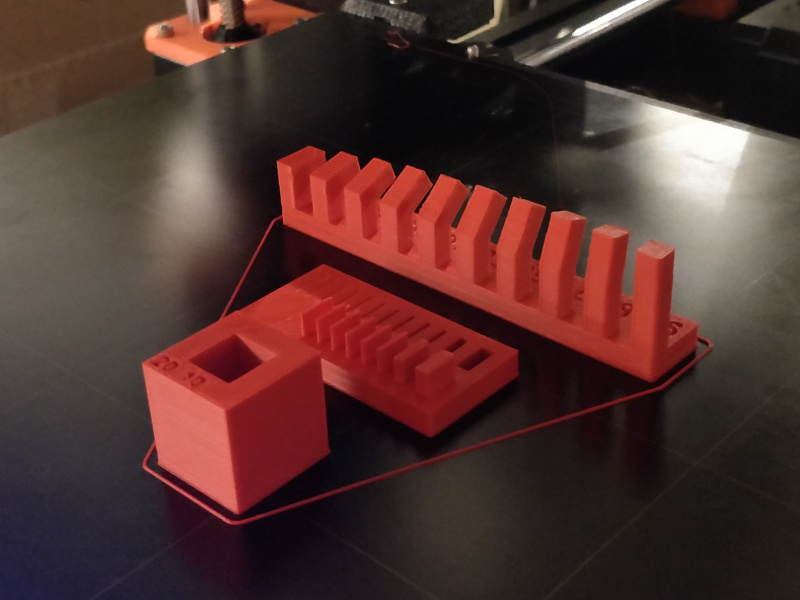
I missed my group's printer characterization meetup, so I printed a few test pieces on one of the CBA's Prusa MK3S printers:
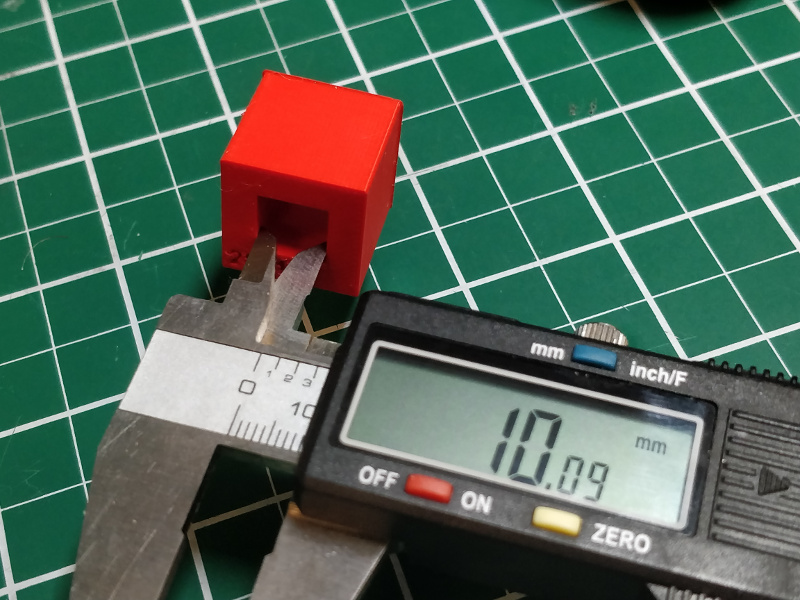
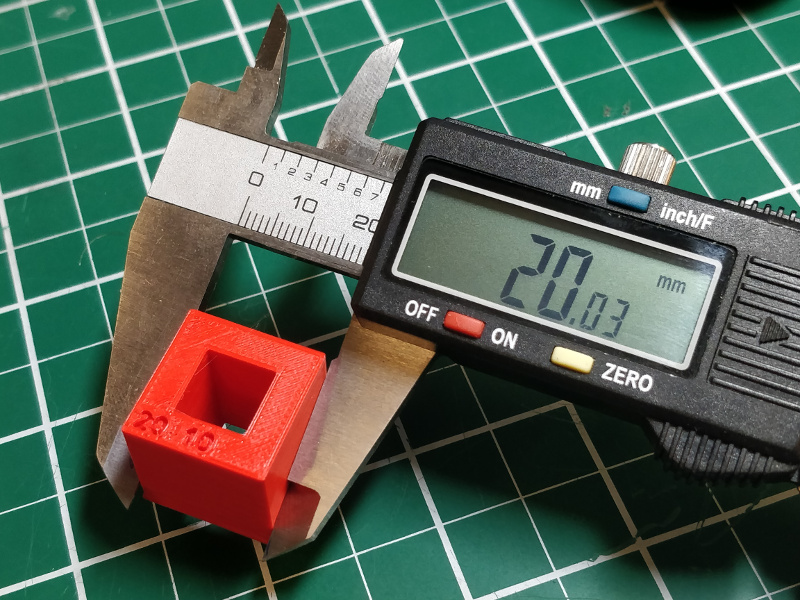
The square print is a dimensional test; it should measure 20 mm externally and 10 mm internally. This was just about dead on:
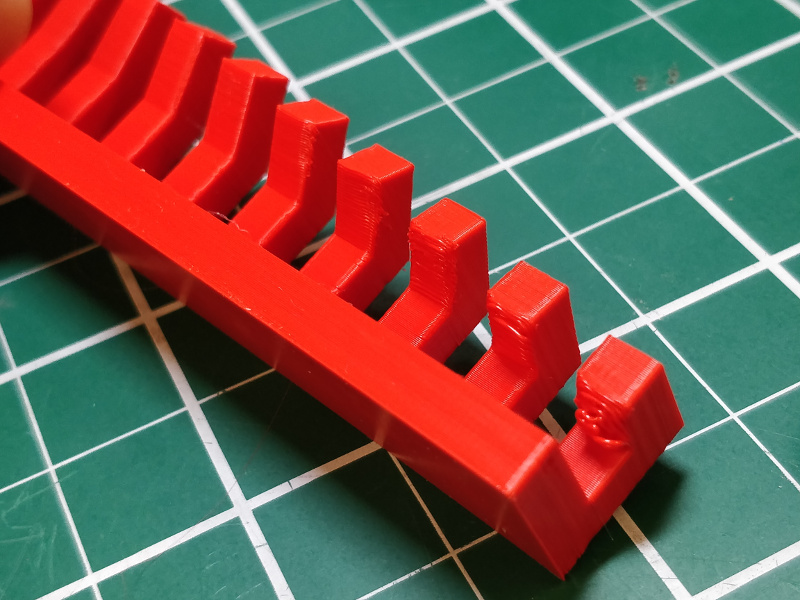
The other two tests are qualitative, checking the printer's capabilities to print overhangs, slots, and thin bars. The overhang test started to show defects at 40 degrees from horizontal (5th from right), but are probably useable within 20 degrees of horizontal (3rd from right); not bad at all:
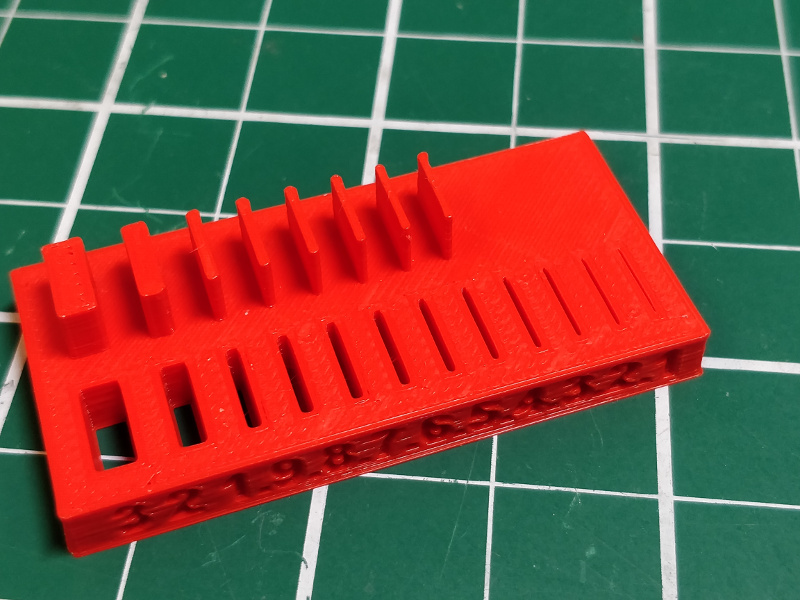
The slot/bar test was similarly performative; with a 0.40 mm nozzle, the printer unsurprisingly skipped the <=0.4 mm bars, but the gaps still showed up reasonably well down to 0.1 mm:
Not bad for a $999 (assembled) printer!
3d scanning
I used CBA's Artec Eva for my 3D scanning experiments. It's a futuristic looking handheld appliance that flashes concerningly bright LEDs at around 15 Hz. The tool takes a good bit of technique to use well; you have to keep the scanner still and pointed in the right direction, and you can't rotate your scan target too fast. I immediately selected a difficult artifact, my Hakko 996B soldering iron tip cleaner:
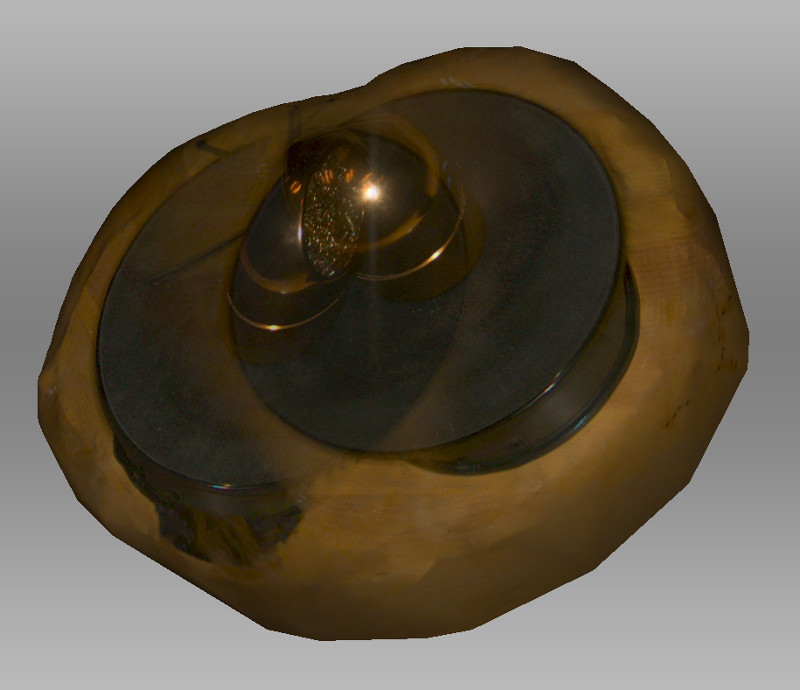
The tip cleaner is coated in 3D scanner kryptonite: shininess. I figured this would cause all manner of problems, and I was right; the first scan looked like a potato with a picture of a Hakko 996B glued to it:
I grabbed a bit of 80 grit sandpaper from the shop and scuffed the poor tip cleaner up, trying to reduce its reflections:
Alas, the results were still sub-par:
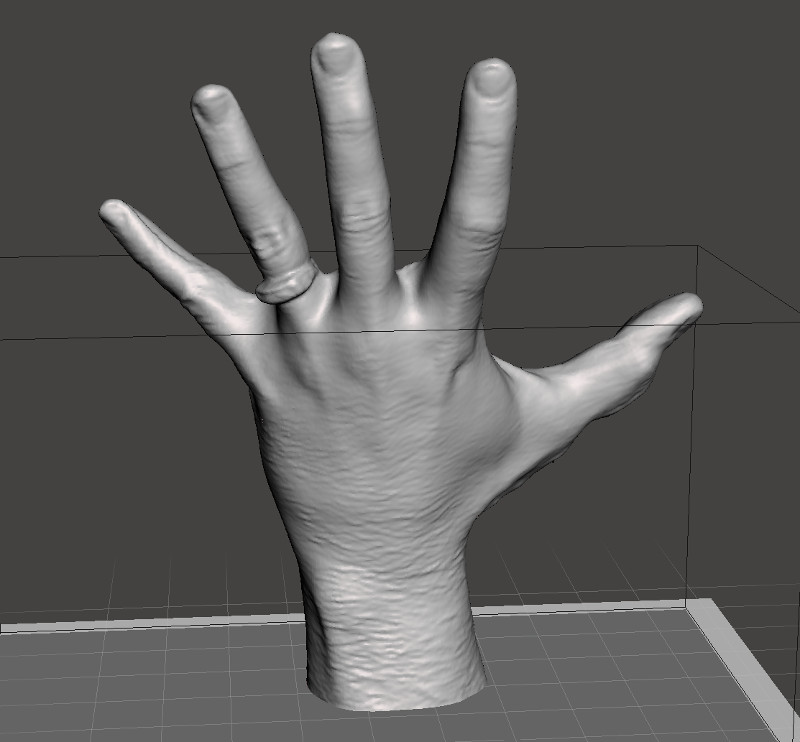
So I decided to scan my hand. I sat on a rotating office chair with my left hand near the rotation axis, while Jack patiently scanned (and re-scanned a few times) my hand. This was surprisingly difficult; the scanner kept beeping as it lost track of the model. Eventually I got a decent result using the auto-pilot settings and minimal clean-up; I then used MeshMixer to chop the bottom of the arm flat and fix a few bumps:
3d printing
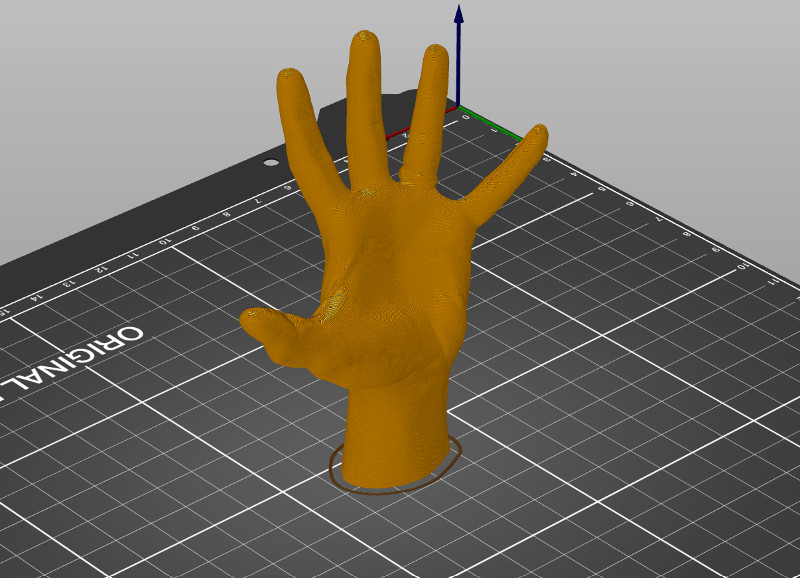
I decided to print my scanned hand. I imported the model into the Prusa's slicer and scaled it to 40%, then sliced the model using default settings (0.40 mm nozzle, 0.15 mm layer height, etc):
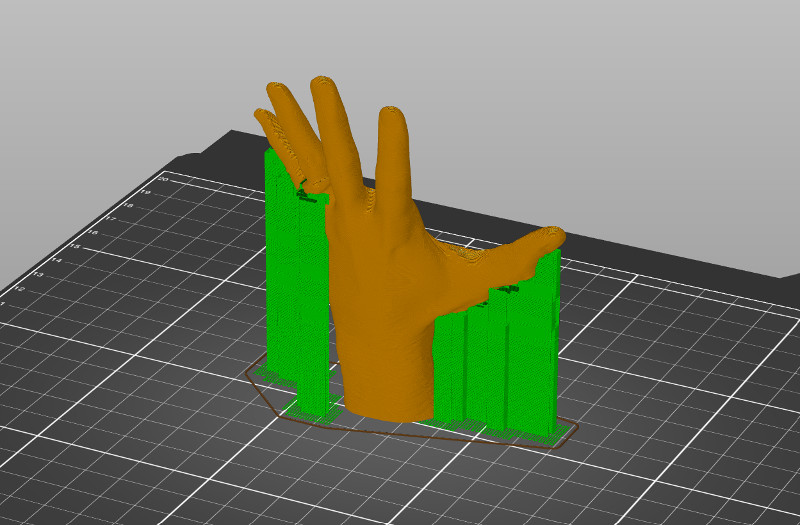
My thumb had enough overhang angle to cause some distortion based on my earlier tests, so I resliced the print with supports:
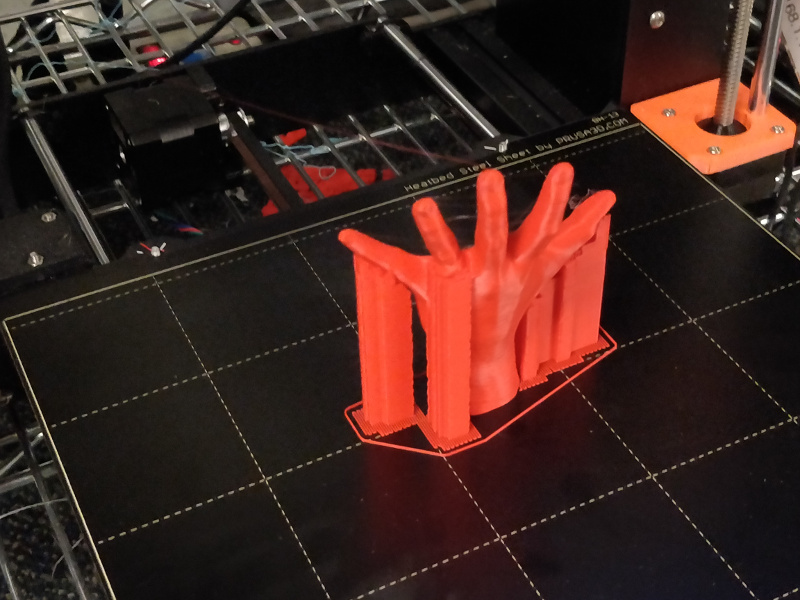
The print started well enough, so I put my phone on the print bed and took a quick video, then my phone got warm:
[command: ffmpeg -i VID_20190930_184936_01.mp4 -filter:v "scale=800:-1" -c:a copy out.mp4]
The print took around 5 hours, so I came back the next morning to a somewhat disturbing scene:
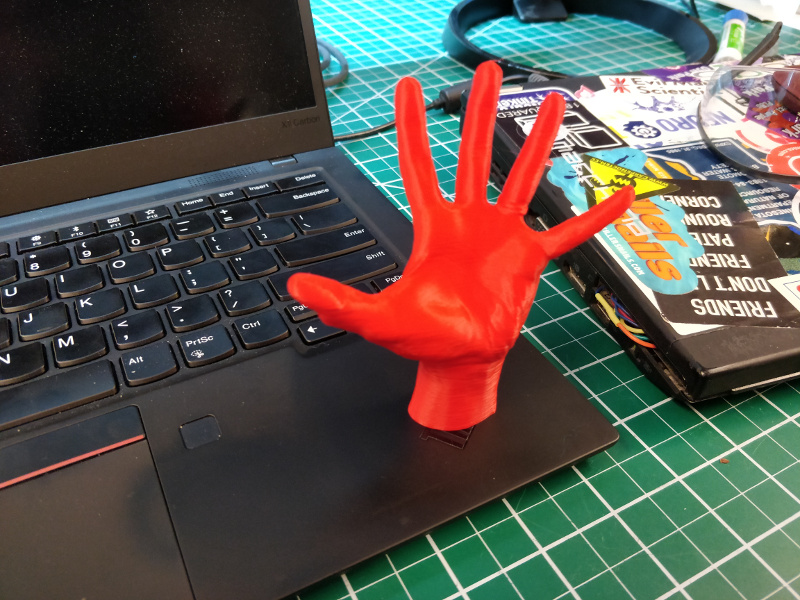
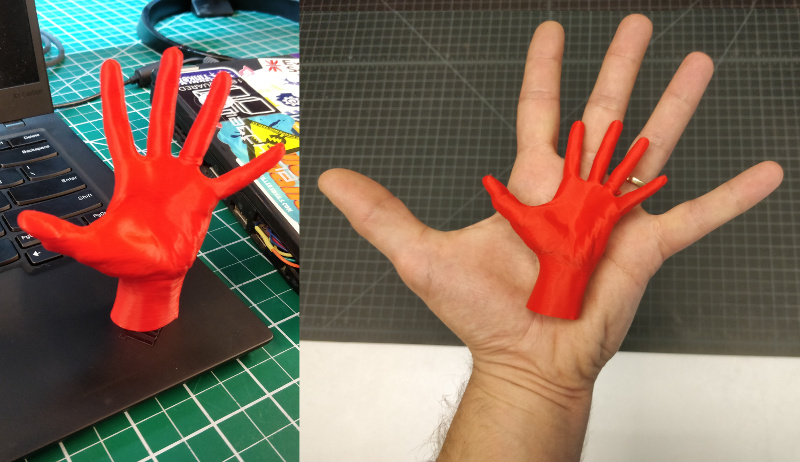
Support materials fell away upon removal from the print bed, leaving me with a near-perfect mini copy of my left hand:
 This week we learned how to 3D scan small objects using the Artec Eva and an electric rotary platform. We also learned how to use the Prusa MK3 extrusion-type 3D printers, and had an opportunity to submit files for fabication using one of the lab's more advanced printers, such as the Stratasys Objet 260.
We had three assignments: (1) characterize the Prusa 3D printer; (2) 3D scan something; and (3) 3D print something that specifically benefits from 3D printing technology.
Thanks to John and Tom for teaching us how to use the 3D printers and scanners!
This week we learned how to 3D scan small objects using the Artec Eva and an electric rotary platform. We also learned how to use the Prusa MK3 extrusion-type 3D printers, and had an opportunity to submit files for fabication using one of the lab's more advanced printers, such as the Stratasys Objet 260.
We had three assignments: (1) characterize the Prusa 3D printer; (2) 3D scan something; and (3) 3D print something that specifically benefits from 3D printing technology.
Thanks to John and Tom for teaching us how to use the 3D printers and scanners!
 The square print is a dimensional test; it should measure 20 mm externally and 10 mm internally. This was just about dead on:
The square print is a dimensional test; it should measure 20 mm externally and 10 mm internally. This was just about dead on:
 The other two tests are qualitative, checking the printer's capabilities to print overhangs, slots, and thin bars. The overhang test started to show defects at 40 degrees from horizontal (5th from right), but are probably useable within 20 degrees of horizontal (3rd from right); not bad at all:
The other two tests are qualitative, checking the printer's capabilities to print overhangs, slots, and thin bars. The overhang test started to show defects at 40 degrees from horizontal (5th from right), but are probably useable within 20 degrees of horizontal (3rd from right); not bad at all:
 The slot/bar test was similarly performative; with a 0.40 mm nozzle, the printer unsurprisingly skipped the <=0.4 mm bars, but the gaps still showed up reasonably well down to 0.1 mm:
The slot/bar test was similarly performative; with a 0.40 mm nozzle, the printer unsurprisingly skipped the <=0.4 mm bars, but the gaps still showed up reasonably well down to 0.1 mm:
 Not bad for a $999 (assembled) printer!
Not bad for a $999 (assembled) printer!
 The tip cleaner is coated in 3D scanner kryptonite: shininess. I figured this would cause all manner of problems, and I was right; the first scan looked like a potato with a picture of a Hakko 996B glued to it:
The tip cleaner is coated in 3D scanner kryptonite: shininess. I figured this would cause all manner of problems, and I was right; the first scan looked like a potato with a picture of a Hakko 996B glued to it:
 I grabbed a bit of 80 grit sandpaper from the shop and scuffed the poor tip cleaner up, trying to reduce its reflections:
I grabbed a bit of 80 grit sandpaper from the shop and scuffed the poor tip cleaner up, trying to reduce its reflections:
 Alas, the results were still sub-par:
Alas, the results were still sub-par:
 So I decided to scan my hand. I sat on a rotating office chair with my left hand near the rotation axis, while Jack patiently scanned (and re-scanned a few times) my hand. This was surprisingly difficult; the scanner kept beeping as it lost track of the model. Eventually I got a decent result using the auto-pilot settings and minimal clean-up; I then used MeshMixer to chop the bottom of the arm flat and fix a few bumps:
So I decided to scan my hand. I sat on a rotating office chair with my left hand near the rotation axis, while Jack patiently scanned (and re-scanned a few times) my hand. This was surprisingly difficult; the scanner kept beeping as it lost track of the model. Eventually I got a decent result using the auto-pilot settings and minimal clean-up; I then used MeshMixer to chop the bottom of the arm flat and fix a few bumps:
 My thumb had enough overhang angle to cause some distortion based on my earlier tests, so I resliced the print with supports:
My thumb had enough overhang angle to cause some distortion based on my earlier tests, so I resliced the print with supports:
 The print started well enough, so I put my phone on the print bed and took a quick video, then my phone got warm:
[command: ffmpeg -i VID_20190930_184936_01.mp4 -filter:v "scale=800:-1" -c:a copy out.mp4]
The print took around 5 hours, so I came back the next morning to a somewhat disturbing scene:
The print started well enough, so I put my phone on the print bed and took a quick video, then my phone got warm:
[command: ffmpeg -i VID_20190930_184936_01.mp4 -filter:v "scale=800:-1" -c:a copy out.mp4]
The print took around 5 hours, so I came back the next morning to a somewhat disturbing scene:
 Support materials fell away upon removal from the print bed, leaving me with a near-perfect mini copy of my left hand:
Support materials fell away upon removal from the print bed, leaving me with a near-perfect mini copy of my left hand: