I have multiple ideas I'm passionate about making in this class, with an aim to incorporate the final project as a core part of my ongoing research in morphing textiles. These are:
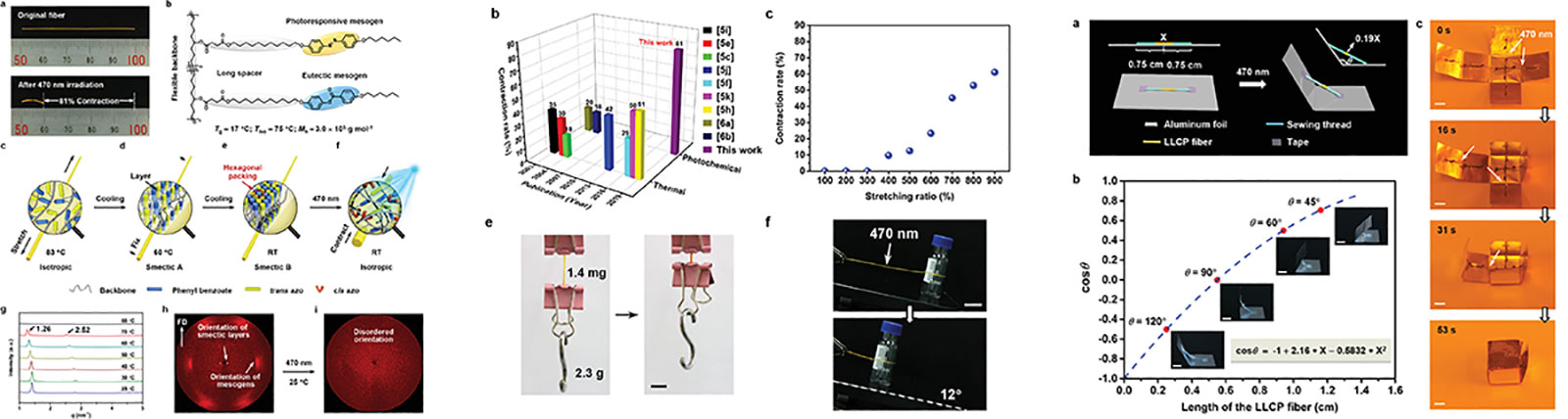
- A light-responsive linear liquid crystal polymer fiber/ribbon actuator and taking the challenge to make these one-way actuators two-way;
- A computerized mini-loom to fabricate woven robots that directly come out of the machine by interweaving of hydraulic fiber actuators with electrohydrodynamic (EHD) fiber pumps;
- A multilumen drawing and spinning setup for multimaterial sensor-actuator integrated fibers (e.g. coaxial liquid metal - liquid crystal polymer fiber).

Pathway 1: Synthesizing Light-actuated Fibers
Liquid crystalline polymers can be classified into main chain, side chain and combined (Figure 3). This classification is based on the place in the polymer where the mesogen is inserted, i.e. within the main chain, as side groups, or both within the main chain and as side groups. A sub-class of liquid crystal polymers, Linear Liquid Crystal Co-polymers, have been recently synthesized combining shape memory effect and photochemical phase transition, to realize light-driven contraction as large as 81% (Reference Paper)
Despite their attractive mechanical characteristics, such as high strain and stress output as well as being untethered due to photoresponsivity, at the current stage these actuators are irreversible. However this may be possible with a novel synthesis introducing another polymer block to the LLCP composition. Although this is a very risky project, it might also be quite high impact. Working with fluid and thermally driven actuators before, my interest for this particular pathway comes from a curiosity and opportunities to work with light-activated systems, and their applications.
Further, I aim to explore and embodiment of a UV emitting optical fiber twined with a UV responsive fiber actuator as a novel 2-ply actuator yarn. If there's time, I'd like to explore higher hierarchical knitted structures of this novel photoresponsve fiber integration.
Pathway 2: Building a Computerized 3D-Weaver
This idea came up during a brainstorming session with my collaborator at EPFL who makes EHD fiber pumps. We wanted to create a fluidic network using fiber pumps and fiber actuators and make these into woven embodiments without using any other yarn in the structure. Since both "fibers" do not behave like conventional fibers, although the actuators have proven to be both knittable and woven, we thought that new technologies at times require their own machines to structure them.
The need for a customized and computerized loom was borne out of several reasons that are: (1) existing digital looms are way too expense, and connected to the first point (2) it is often risky to introduce non conventional yarns to these machines, (3) hand looms are cheap but relies on manual processes, (4) we couldn't find a product-grade digital mini loom that would fit our needs.
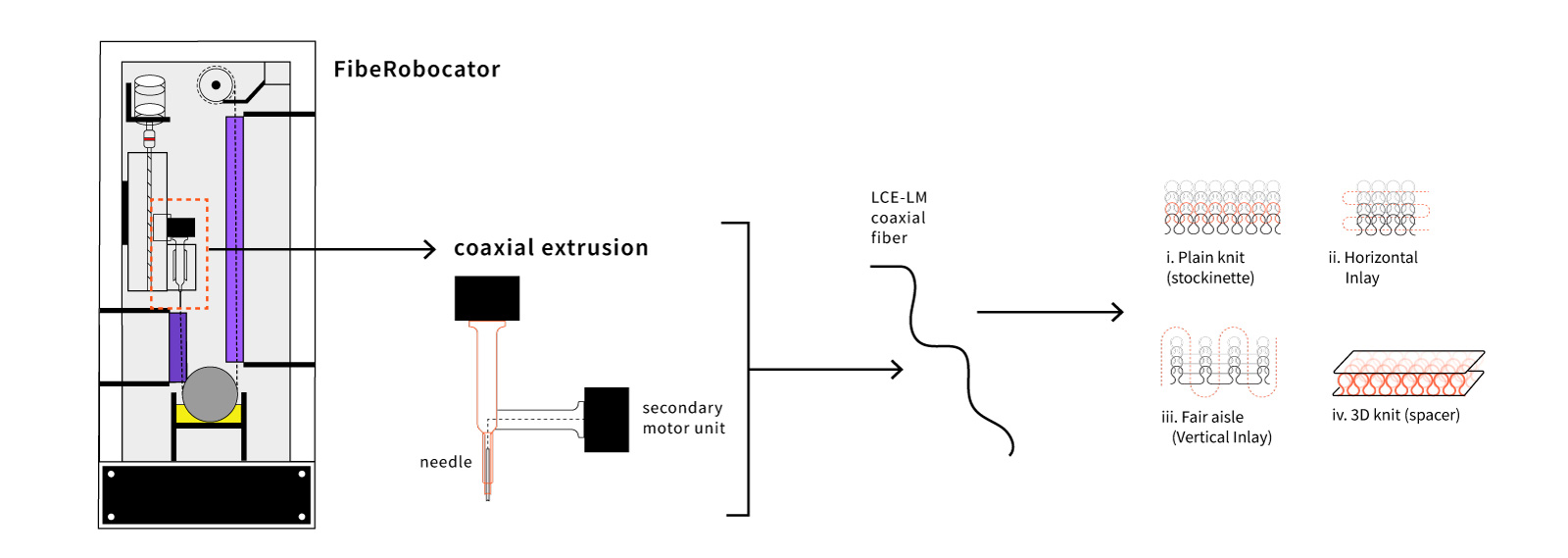
Pathway 3: Coaxial Drawing and Spinning Setup for Fiberobotics
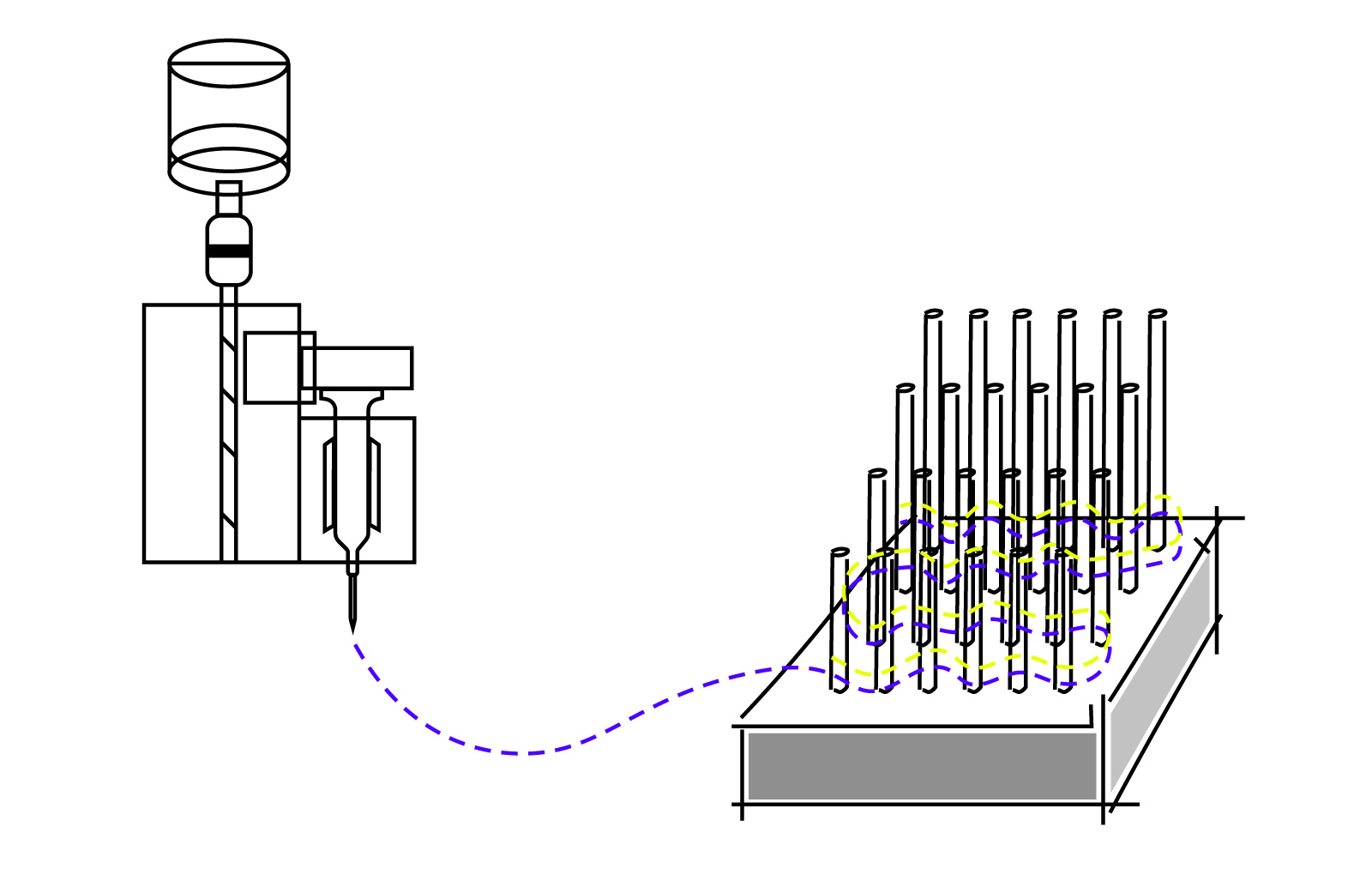
Integration of multiple functions into a simple unit can simplify the device design and facilitate the miniaturization and portability of soft robots. Actuating and sensing functions are the basis of soft robots to interact with the environment. In this path, the idea is to build a modified melt-spinning desktop machine based on the existing FibeRobo UV drawing setup (which I recently replicated with Jack), and to introduce a secondary needle to produce liquid crystal elastomer (LCE) fibers with a paste-form liquid metal (LM) core to construct LCE–LM coaxial fibers with integrated sensing and actuation functions. This will require designing and making a coaxial needles and matching viscosities of LCE and LM for successful co-extrusion.
The LM core will generate heat upon an electrical trigger to actuate the outer LCE shell. When LCE–LM coaxial fibers are actuated or loaded with objects, the deformation of LCE shell will forces the inner LM to reform, allowing to sense the motion of the fibers or the mass of objects, by measuring the feedback voltage or resistance change of LM.
If successful, I aim to build higher hierarchical structures with LCE-LM coaxial fibers on Shima Seiki whole garment knitting machine and characterize their behaviour.