(Week 0) model (raster, vector, 2D, 3D, render, animate, simulate, ...) a possible final project
Motivation
Note: All figures taken from this presentation by Michael Rubenstein, Harvard University
I'm interested in mechatronic systems, specifically those that will enable space exploration and development. When the first human settlements on Mars and beyond begin within this century, it's likely that some form of swarm intelligence will be used to build the lunar/martian structures that humans will inhabit. After a conversation with a TA in my CBA lab section, Miana, I learned about some of Radhika Nagpal's work with Biologically-inspired Robot Collectives, including novel hardware design for robot swarms, decentralized collective algorithms/theory, and global-to-local swarm programming.

Swarm intelligence is an incredible feat of biomimicry. There are plenty of examples in nature, a few include ants, bees, flocks of birds, and schools of fish. Swarm intelligence Swarm intelligence is the collective behaviour of decentralized, self-organized systems. Swarm intelligence systems are typically made up of a population of simple agents such as boids interacting locally with one another and with their environment. The agents follow very simple rules, and although there is no centralized control structure dictating how individual agents should behave, local, and to a certain degree random, interactions between such agents lead to the emergence of intelligent global behaviour, unknown to the individual agents. The ability to create decentralized, intelligent systems with emergent properties is incredibly powerful.

Among Radhika Nagpal's many exciting projects, I found the Kilobot. The Kilobot is a low cost scalable robot system for collective behaviors, that mimics much of the behavior of fish. In essence, they are mini moving robots (no more than a few centimeters in diameter) that edge-follow until they entered the desired shape as determined by a collectively constructed coordinate system.
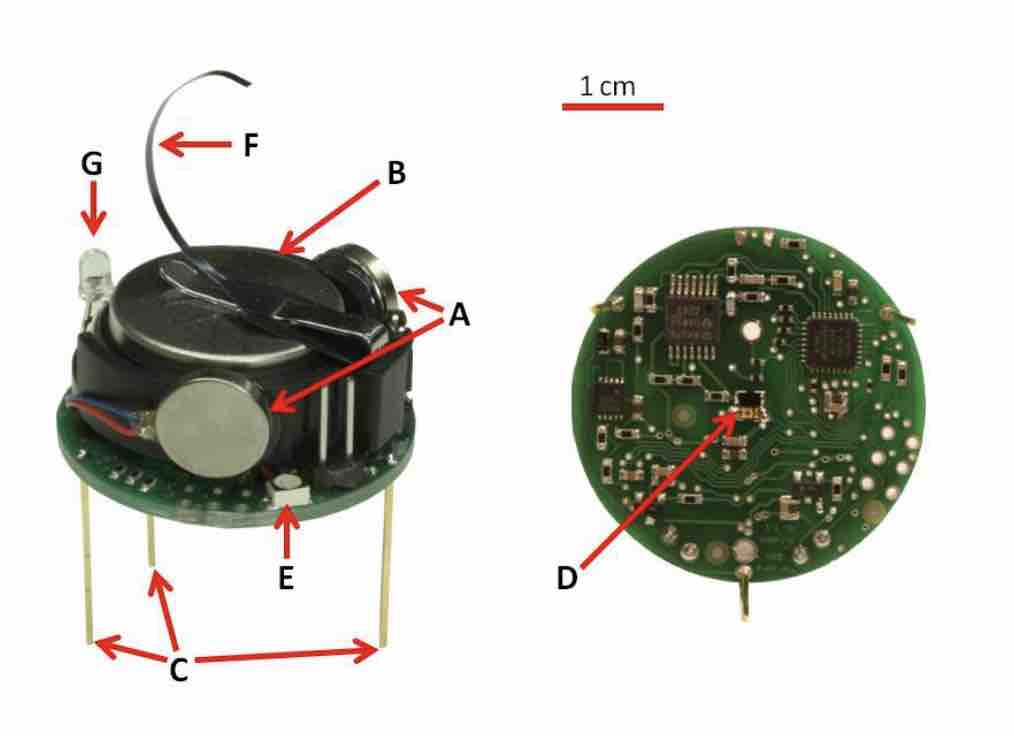
The design of the Kilobot is: a rechargeable lithium-ion battery, a three color (red, green, and blue) LED which displays information to the user, and two vibrators for movement. When either is activated, the Kilobot turns at about 45° per second. When both are activated, the robot moves forward at about 1 cm/s. The robot stands on 3 rigid legs, which elevates the robot 2 cm above the surface. The individual robots are equipped with an infrared transmitter and receiver so that they can communicate with each other. The transmitter of a robot sends light toward the surface which reflects up to the receiver of another nearby robot, which then executes a command based on the program.

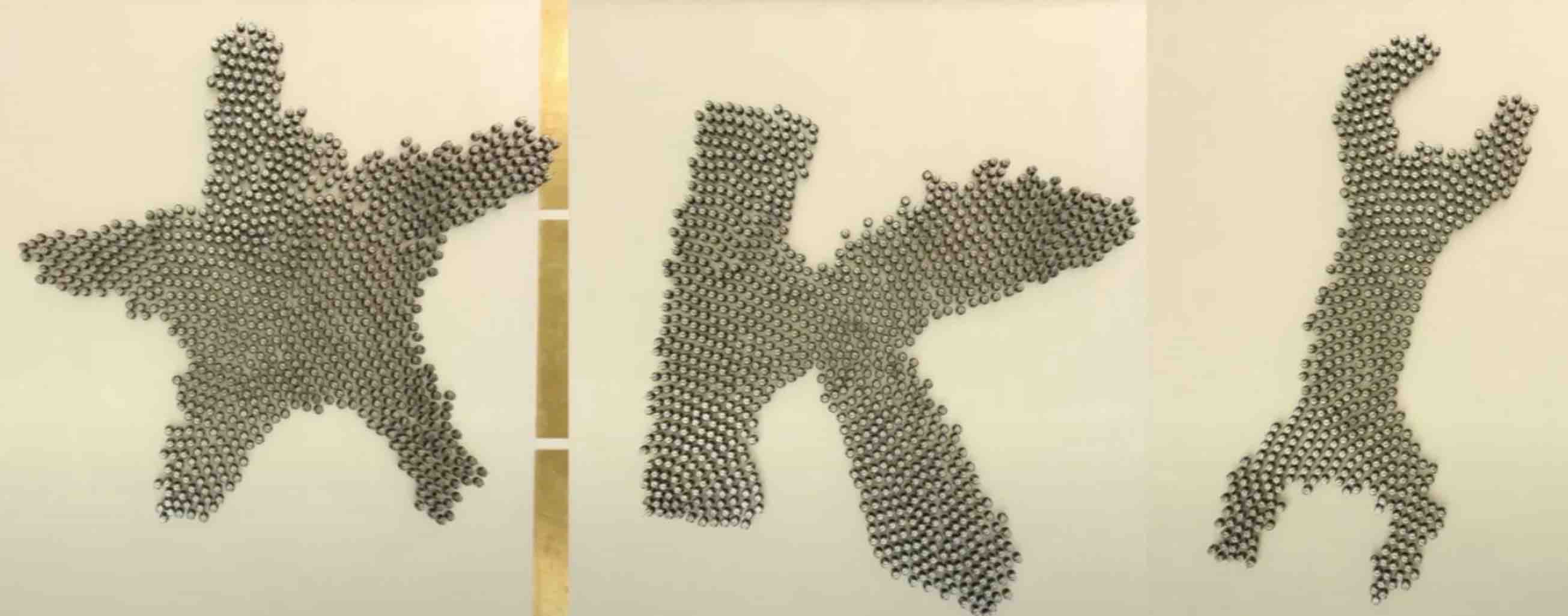
By using thousands of Kilobots, Radhika Nagpal and Michael Rubenstein were able to create this cool demonstration.
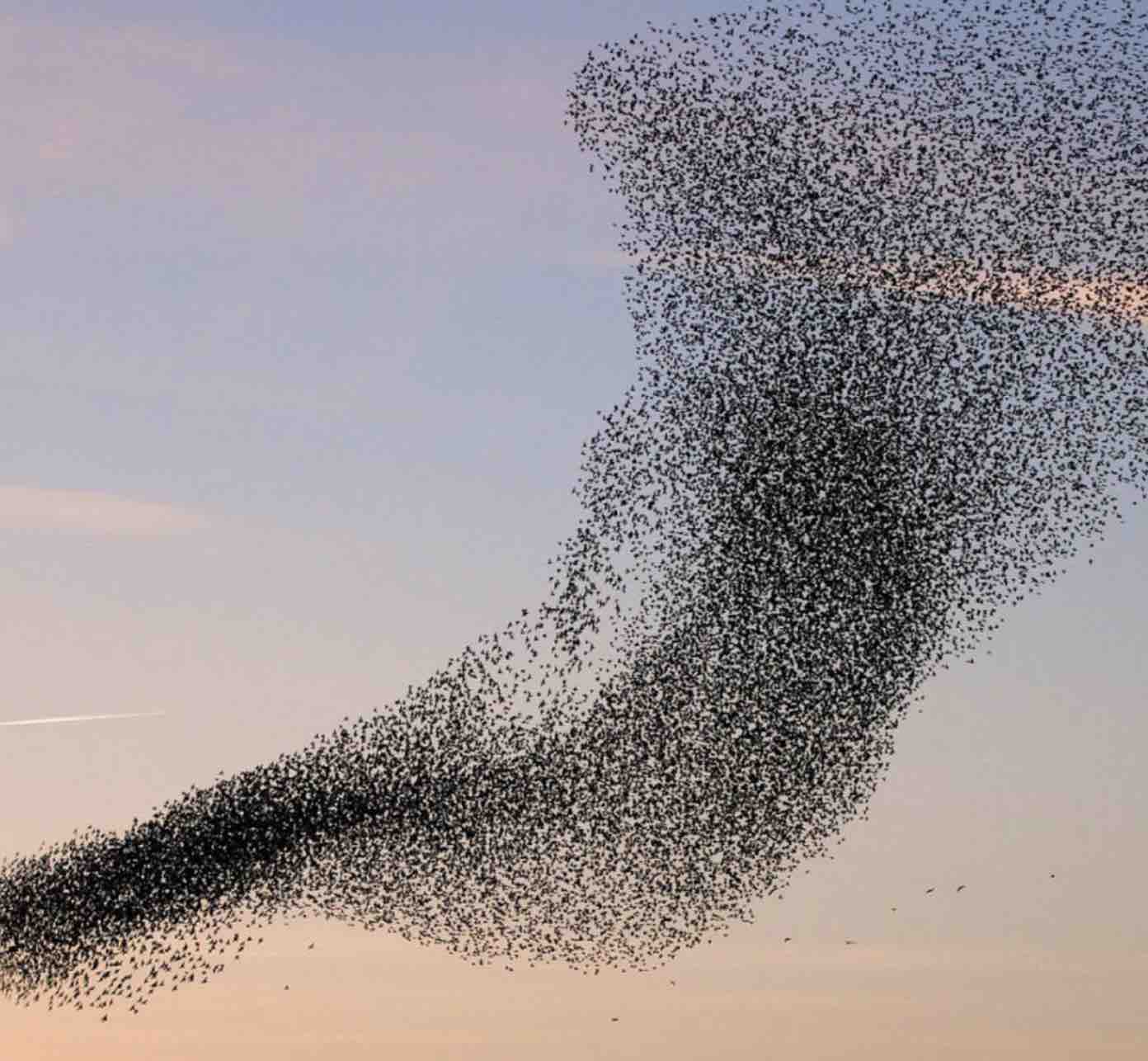
I hope to update this page with design files/CAD as I ideate more on how to innovate on this current design. I would love to venture into 3D swarm intelligence (mimicking the movement of flocks of birds, for example, by creating swarms of miniature flying robots that can respond dynamically to obstacles, and as a group), however I believe there will be significant challenges in the 2D implementation alone.