Magnetically Actuated Liquid Metal (LM) Droplets Toward Reconfigurable Circuits
Final Project: Dancing Drops
Idea 2: Liquid Metal- Droplet Based Reconfigurable Electronics
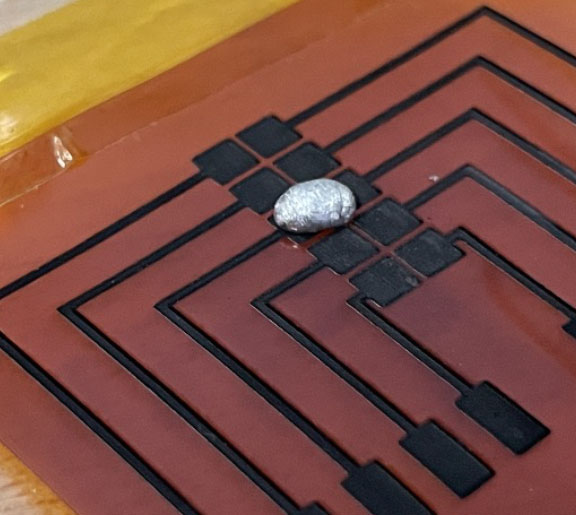
The idea is to manipulate graphene coated LM droplet on top of 2D patterned circuit and dynamically change connections in the circuit or hange the resistance due to the LM droplet movement
Inspiration: My recent work on graphene coated liquid metal droplets for motion sensing ( here and here ) Graphene as a LM droplet coating: Attributes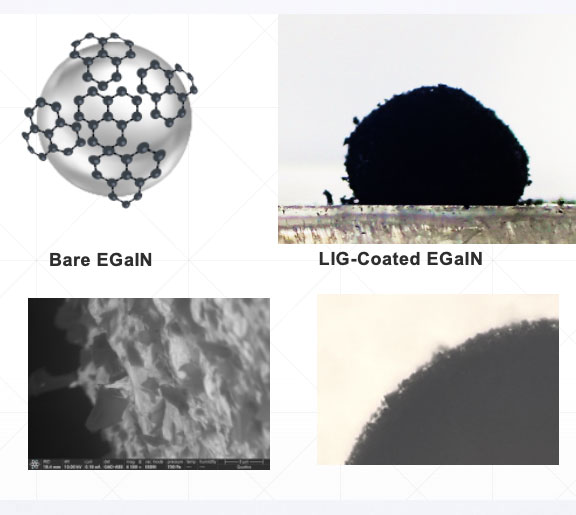
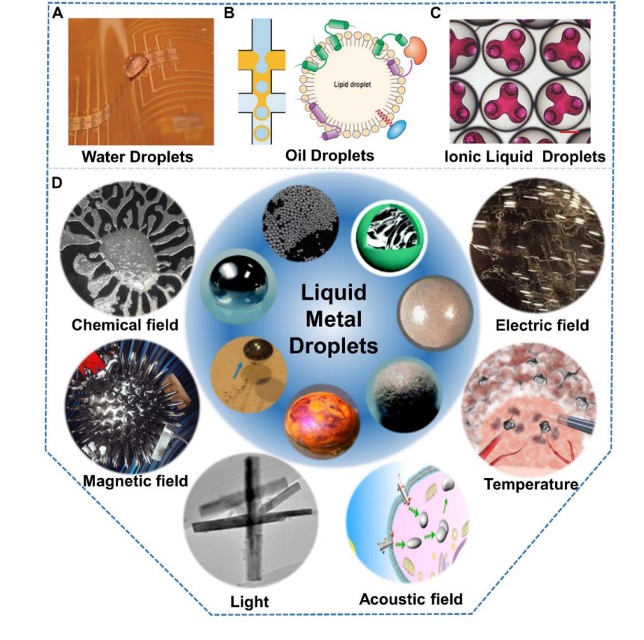
 Actuataed LM droplet can be leveraged for:
Actuataed LM droplet can be leveraged for:
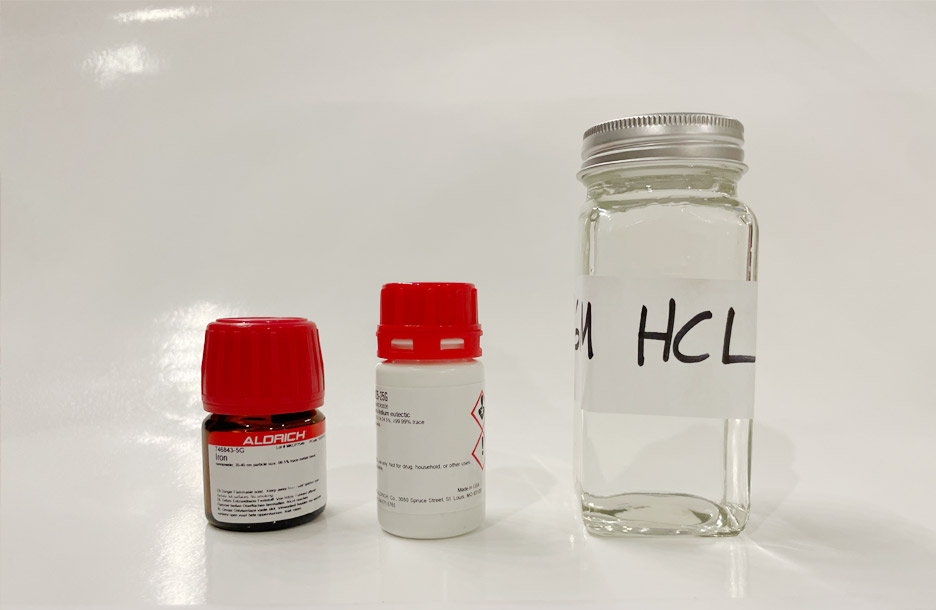
Idea 2: Current Platfrom Material
Substrate : Laser induced graphene on polyamide substrate
Droplet: Graphene Coated - Eutectic Indium Gallium (EGaIn)
Actuation: I want to to be dry environment
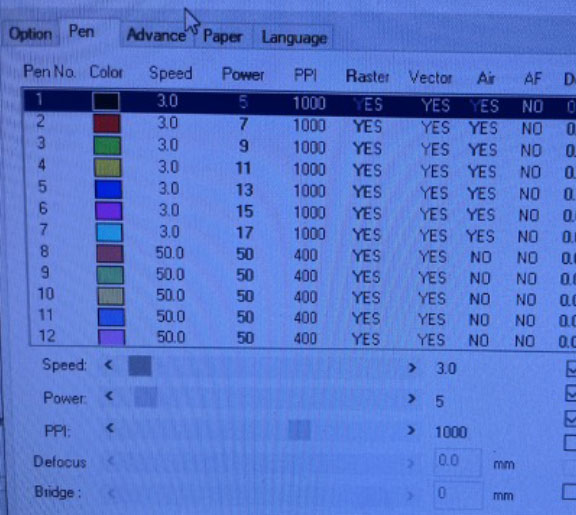
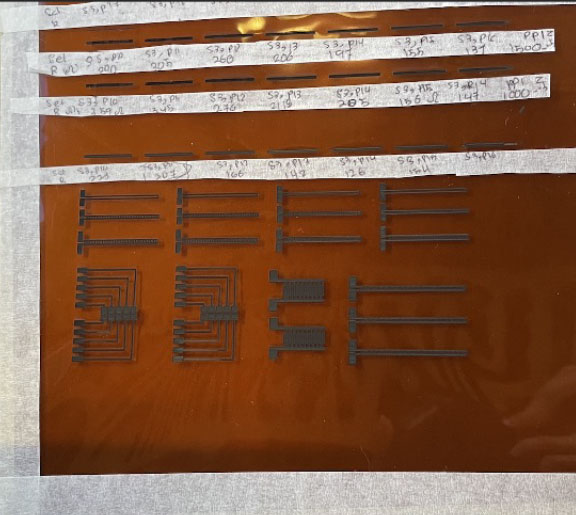
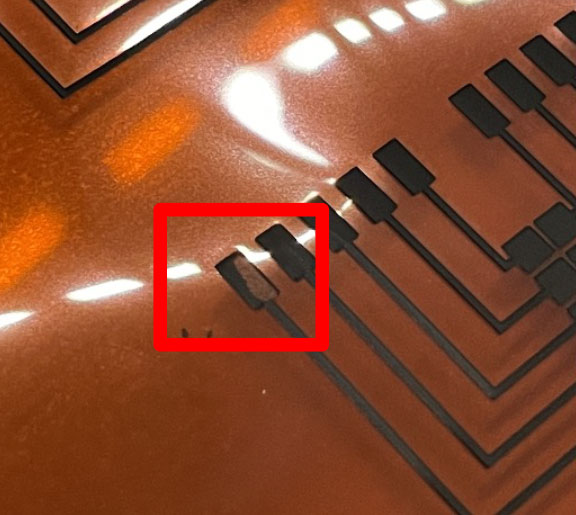
Idea 2: Initial Experimentation with Co2 Laser
I have been using the GCC CO2 laser at CBA in order to create my material
Method: Direct laser writing on polyimide substrate to generate laser-induced graphene (LIG) !
Why graphene will be used as?



Idea 2: Initial Experimentation with magnetic actuation
Source 1 , Source 2 , Source 3
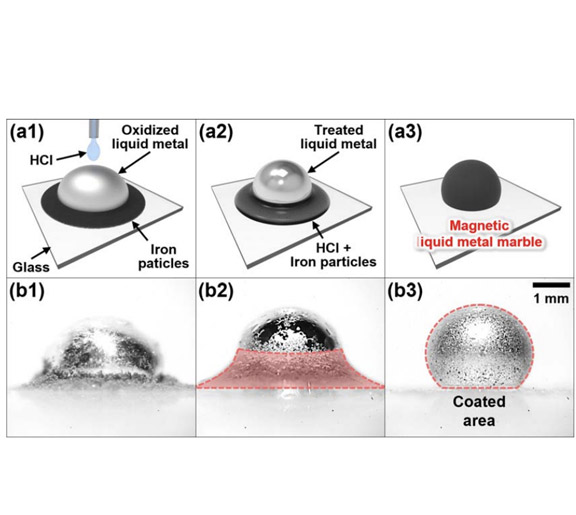
I have been doing some reading in the literature, and my observation is that most people trying to move gallium-based liquid metals magnetically are either adding it in its electrolyte bath or using a permanent magnet. In all cases, the LM droplet has to be coated with magnetic particles such as iron to actuate it. Ideally, I would like to use an electromagnet for control, and I would like it to be in a dry environment so that I can read resistance variations reflected on my LIG patterned substrate

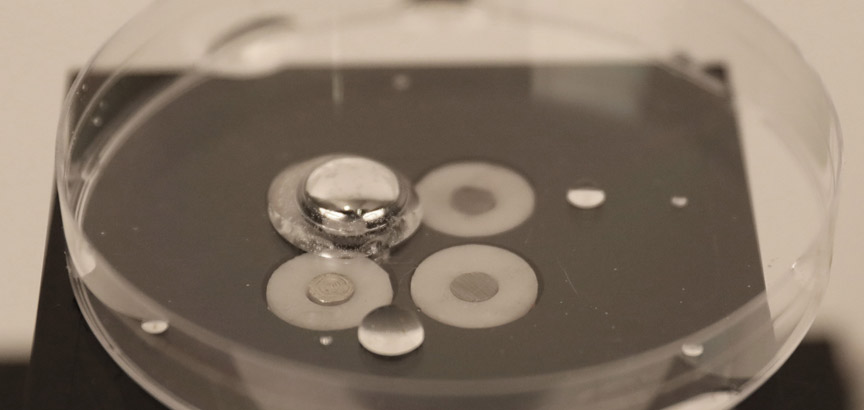
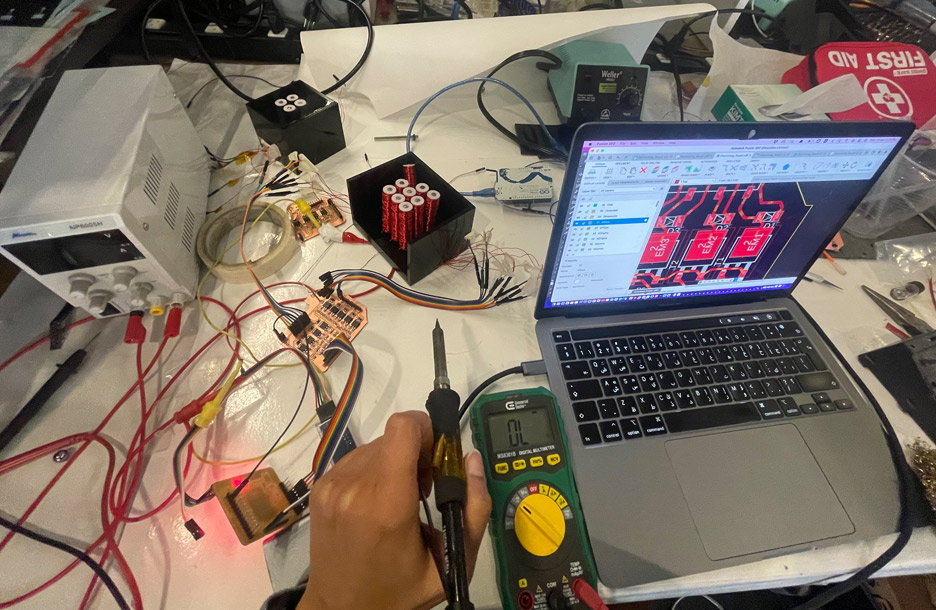
As part of the output week, I experimented with different forms of electromagnets, commercial ones and one I made by myself. As of now, I cannot generate enough magnetic force to pull the droplet to the adjacent electromagnet. I am planning to read more about electromagnet designs and better understand how to design the optimal one for me and if it is a feasible mechanism for what i am trying to achieve. Additionally, I am using relatively large iron particles, using nanoparticles should improve the homogeneity of the liquid metal slug. Below you will find two videos, in the first one, I am moving my iron mixed LM droplet with a permanent magnet. On the other video, I am attempting to move it with the electromagnet, but it was not enough


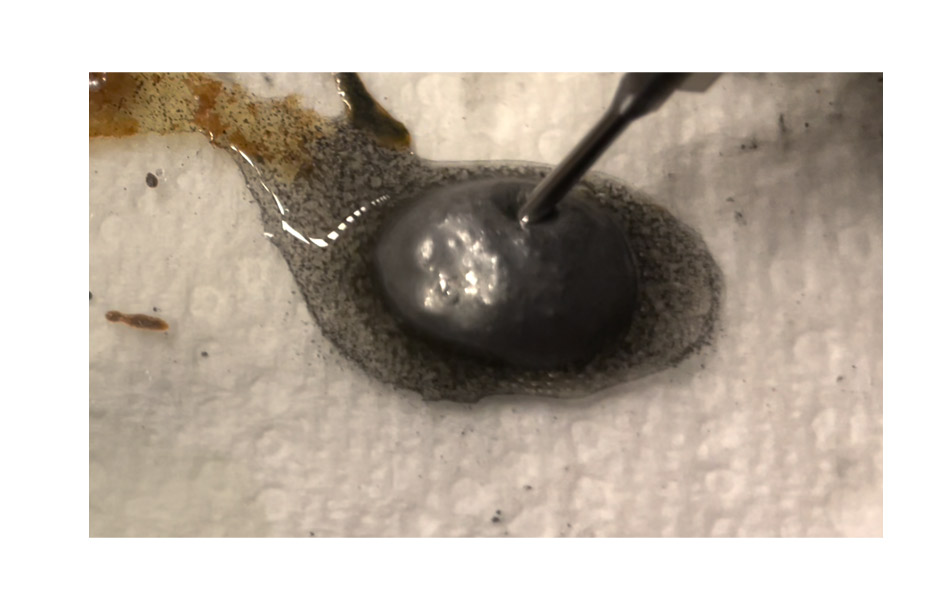
I initially used iron particles with a large diameter that I got from Amazon. When I tried to coat my LM droplet with those, it was quite problematic. Since they were big and did not miz well with the LM, when I try to move the droplet with a permanent magnet, the iron particle starts to poke out of the LM droplet, exposing some of the inner LM core, which is sticky and problematic.
Then, I found finer powder of iron particles with a diameter of 10 micrometers. I did a quick coating of a random amount of the powder at the surface of LM droplet. It was easier to mix and as you can see it forms a nice coating around and I was able to move it over the LIG electrode as shown in the video below.



Initial experimentation with magnetic actuation
LM actuation with permanent magnet
LIG electrode resistance variation as a function of LM droplet location
Intial LM slug actuation test with commercial electromagnets
Reference work : Magman by Jiří Zemánek , a former CBA postdoc.
Final Project Details : Dancing Drops
Summary Slide


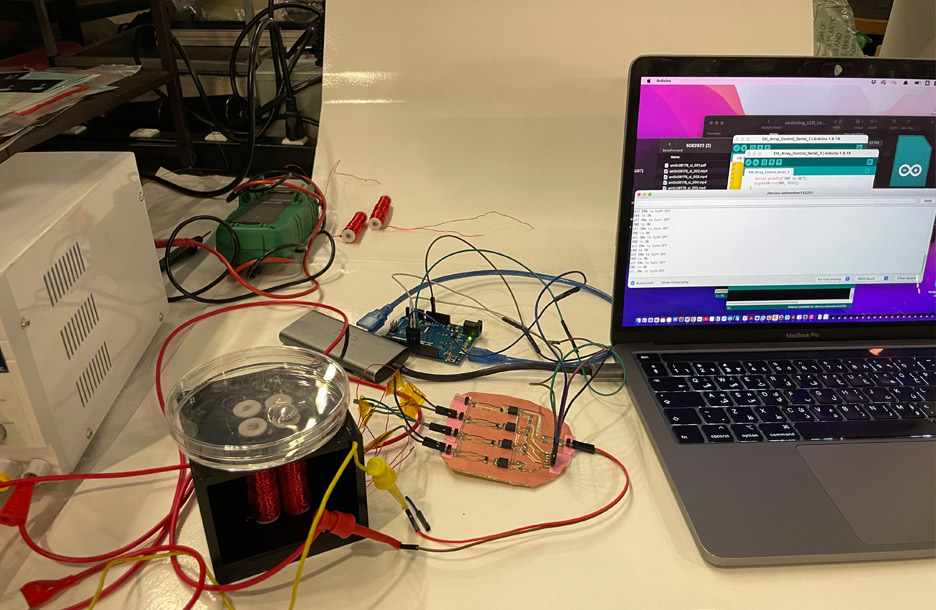
Final Project in Action!
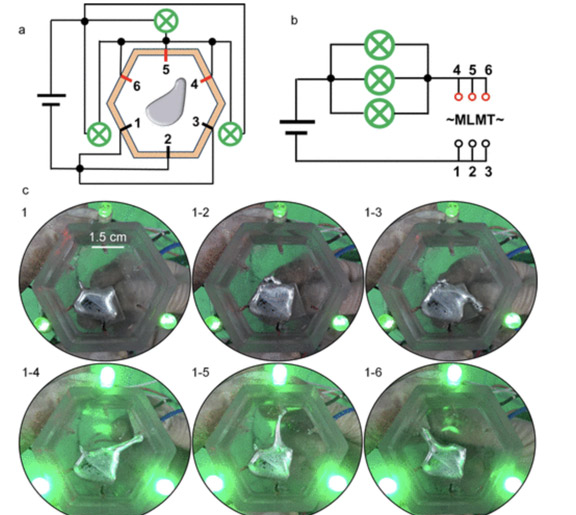
The video below demonstrates the implementation described above:
Sequential actuation of the liquid metal droplets by a sequential triggering of the electromagnets
Attempt to make dancing liquid metal drops!
Demo from HTMAA 2022 Open House
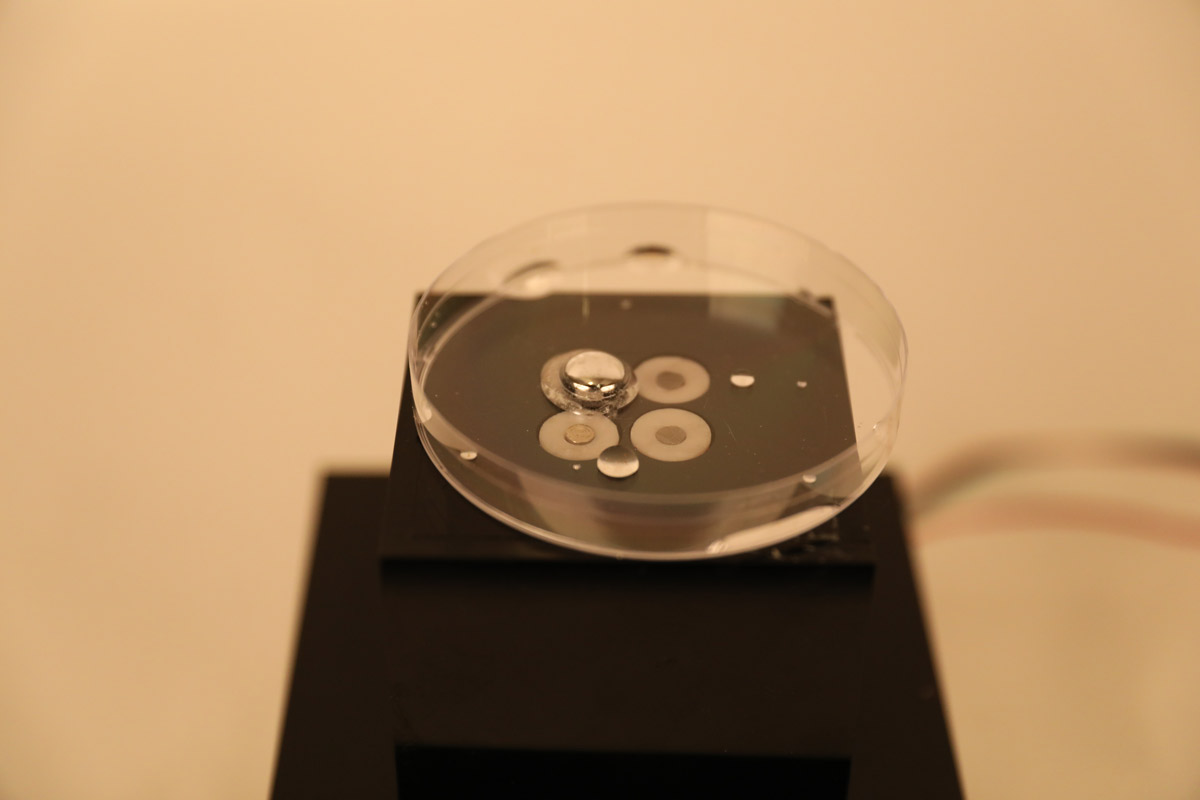
My original idea for the project was to integrate both actuation and feedback into the system. The feedback component will consist of a substrate patterned with conductive material where the liquid metal will connect and disconnect between electrodes. Thus, I focused most of my efforts on actuation and did not get the time to integrate the sensing element within the system. However, below I demonstrate the functionality of the droplet once it passes through two electrodes made out of indium tin oxide on glass. As seen in the video, once the conductive liquid metal droplet makes contact between the two electrodes, it allows current to pass through, triggering the switch.
What does it do?
Who's done what beforehand?
What did you design?
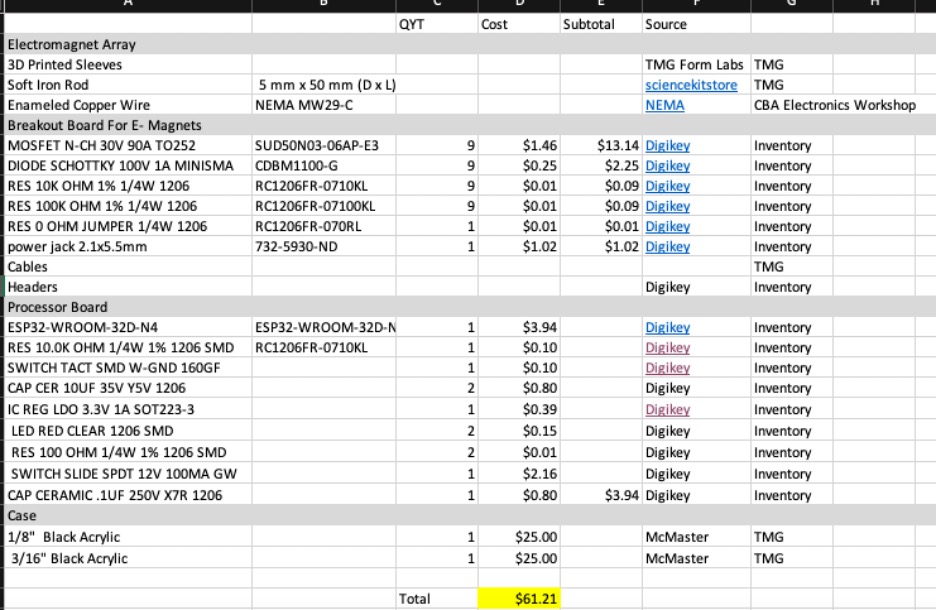
What materials and components were used?
Where did they come from?
How much did they cost?
What parts and systems were made?
What processes were used?
What questions were answered?
What worked? What didn't?
What worked:
What did not work:
How was it evaluated?
What are the implications?
Things I would like to do after the class




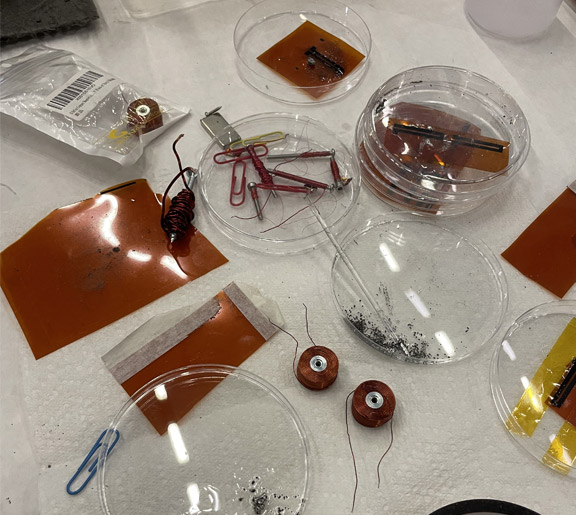
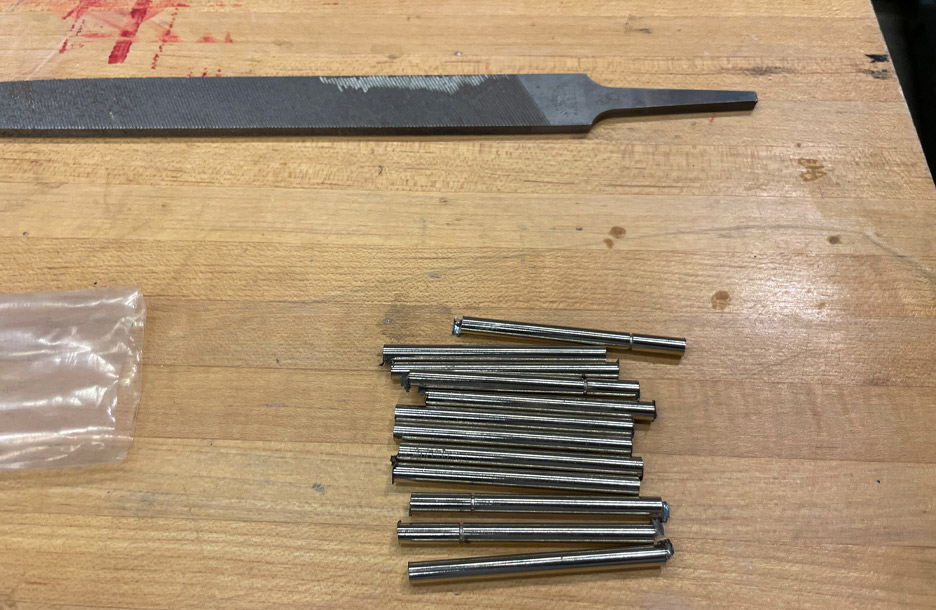
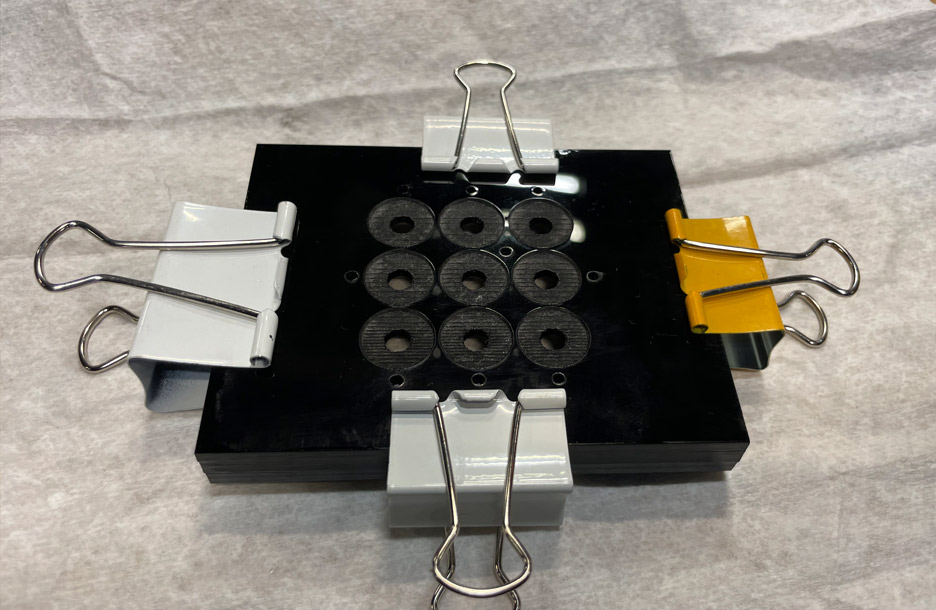
Making the electromagents
process




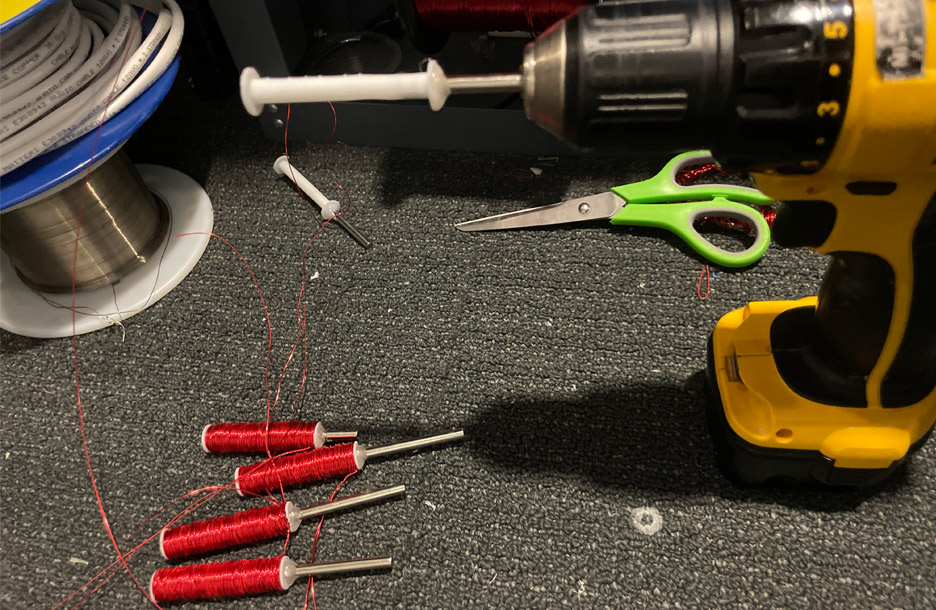
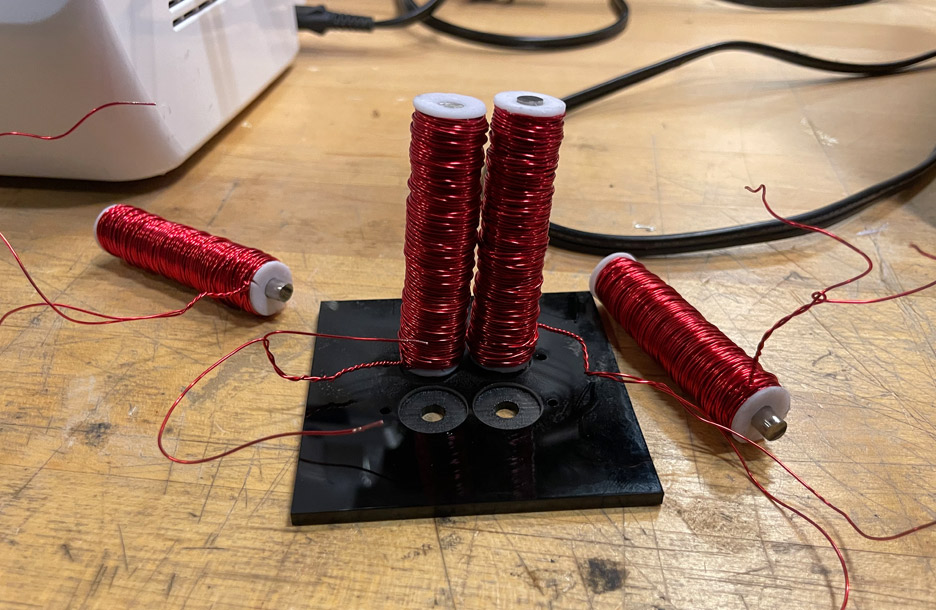
initial test turns out to be a success !

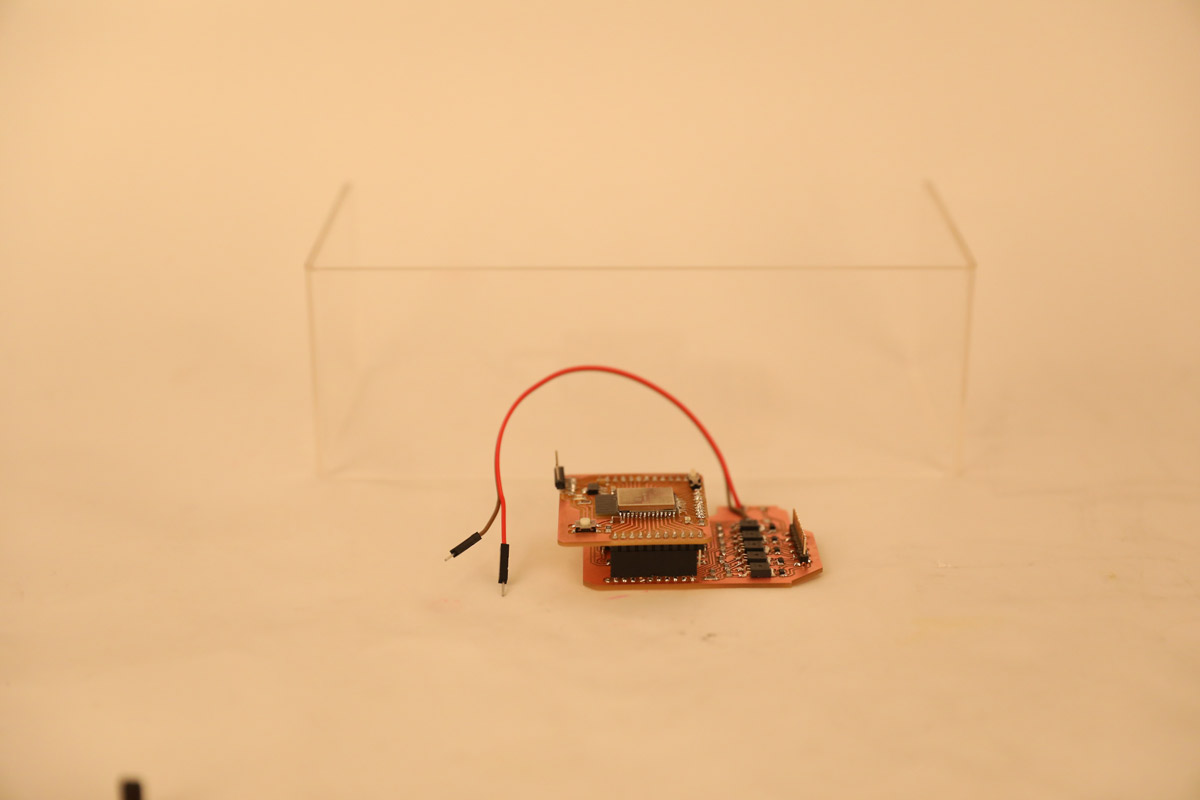
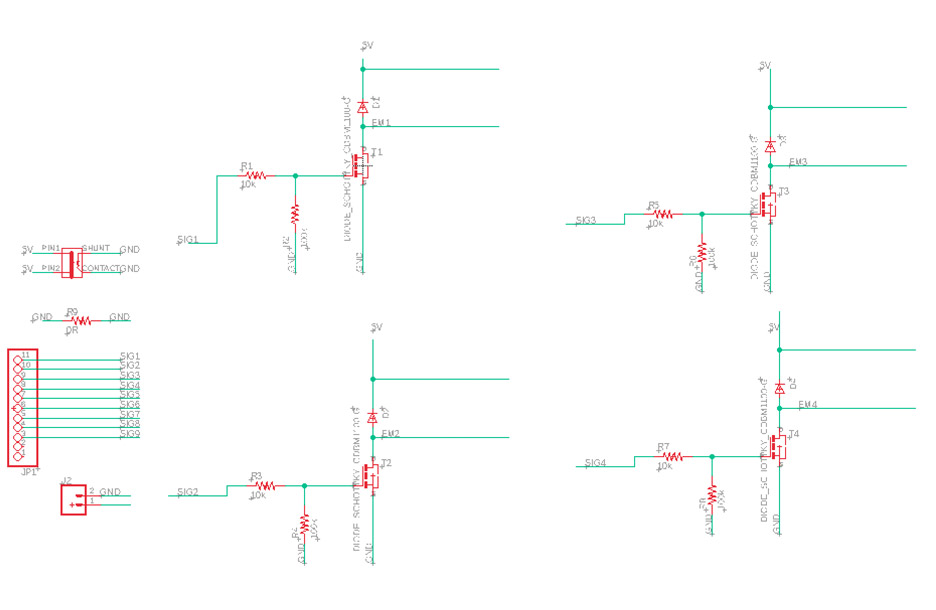
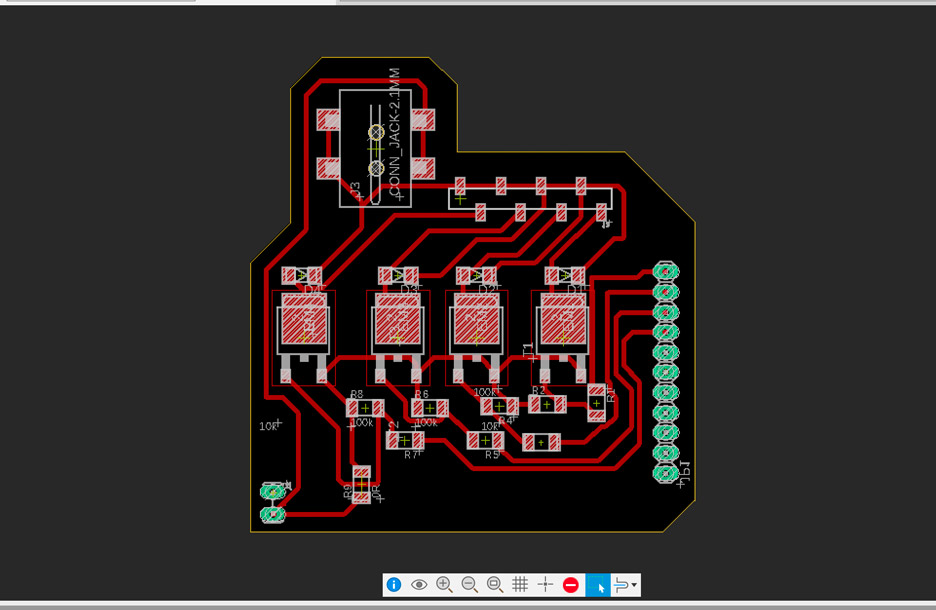
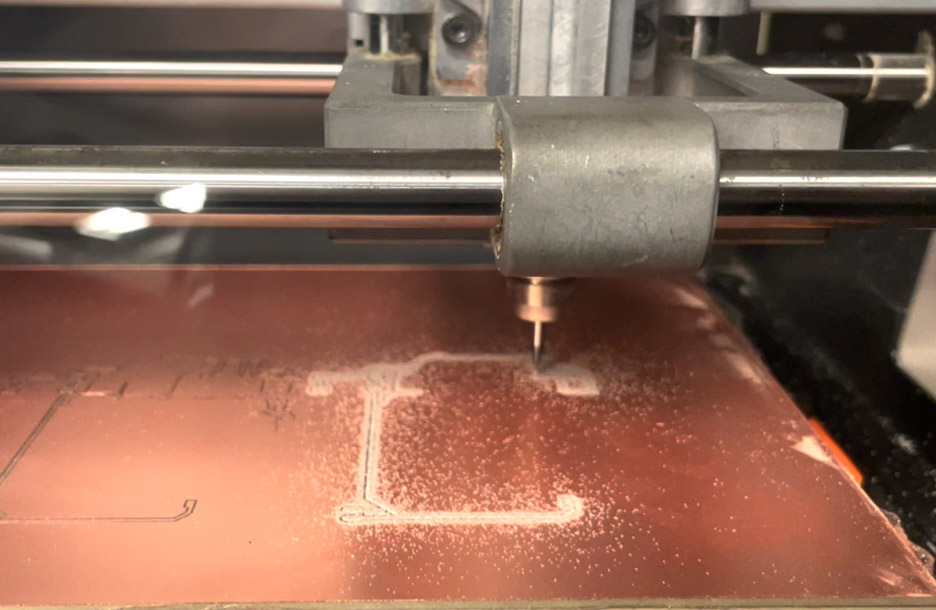
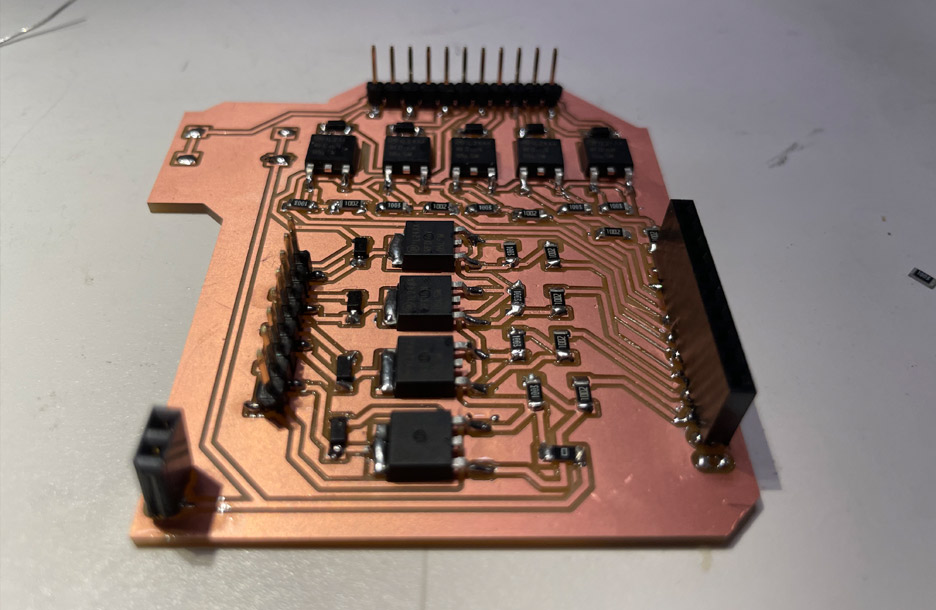
PCB Design and Fabrication
process


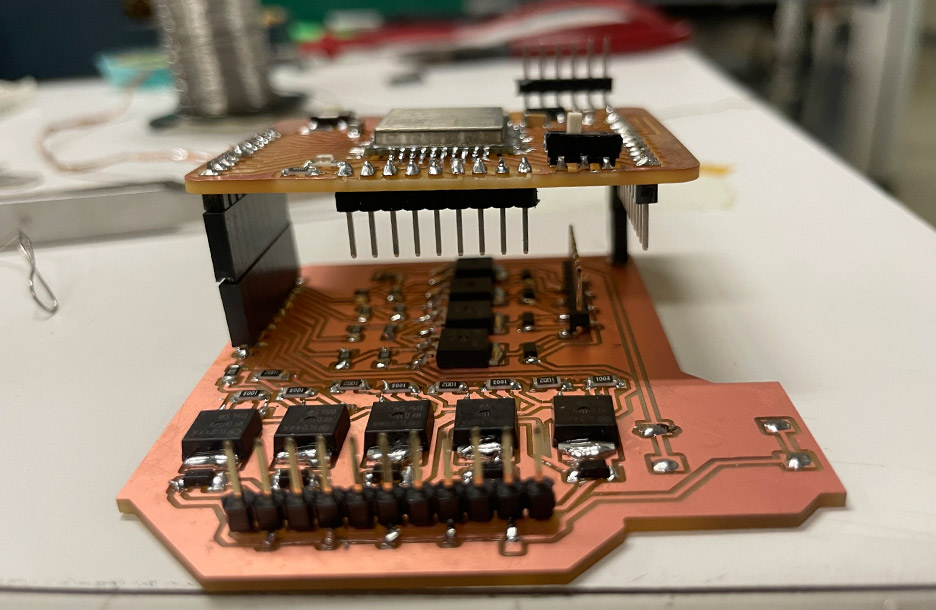
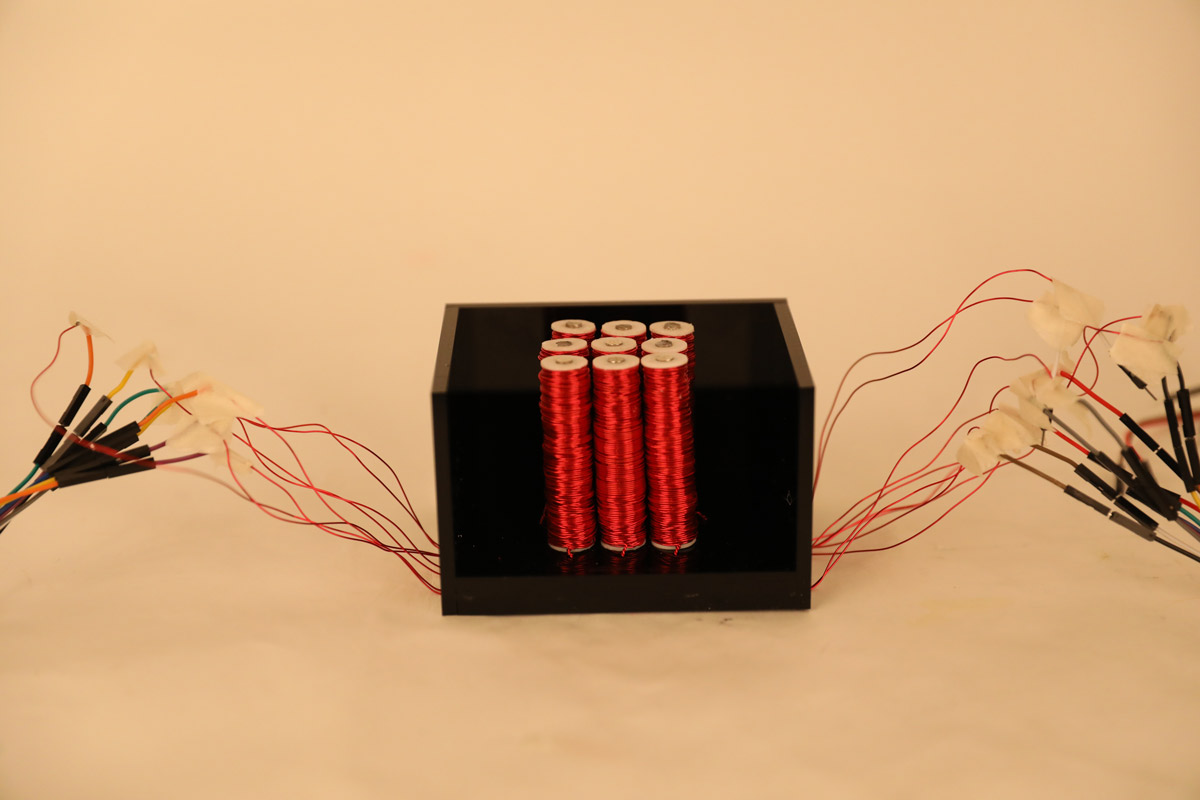
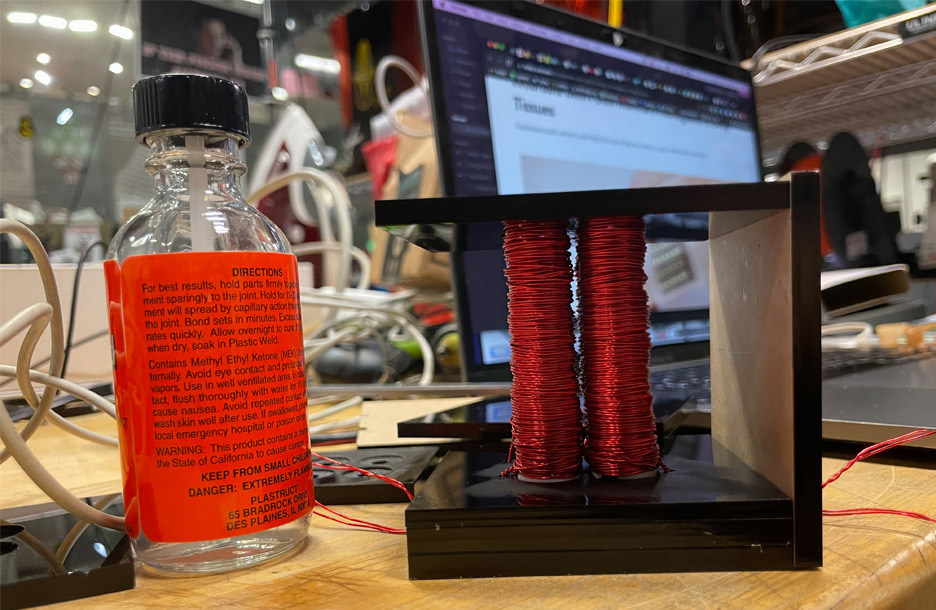
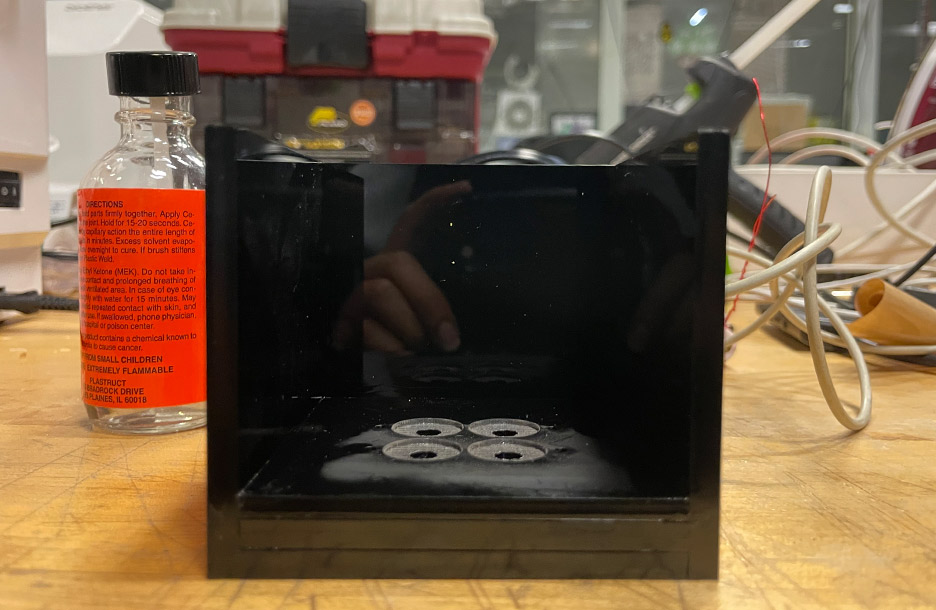
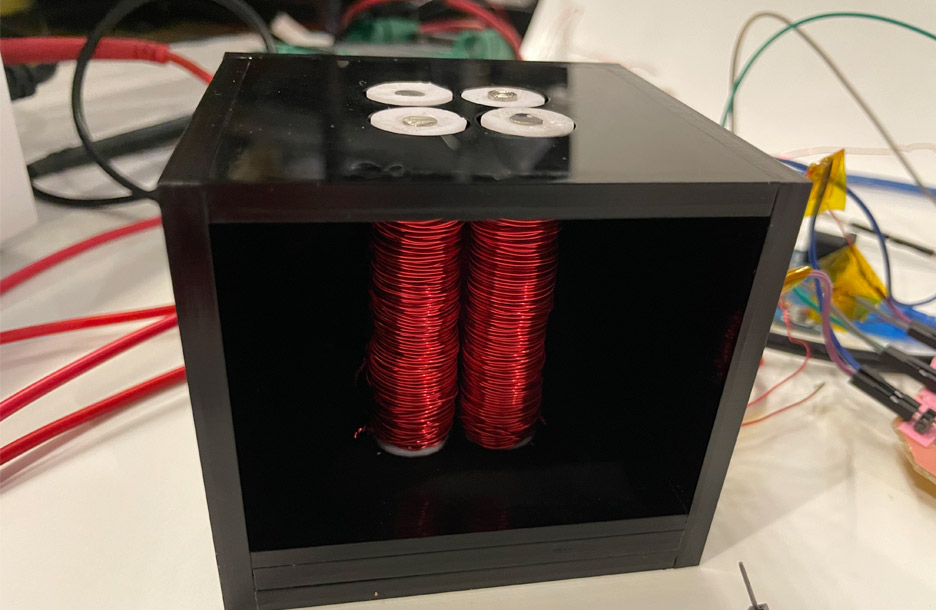
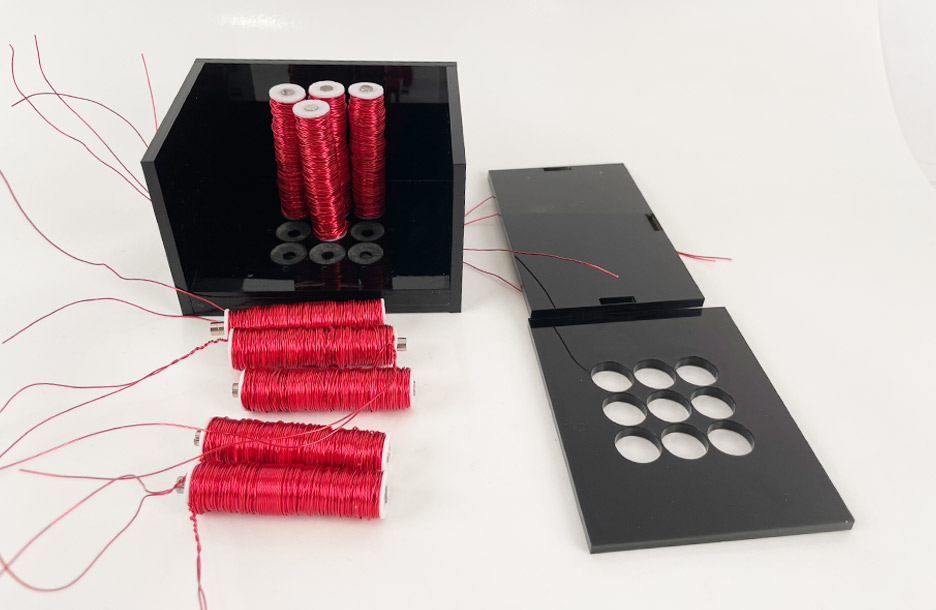
Packaging
process



Magnetic Liquid Metal Preparation
process




Idea 2: Sketch
IN PROGRESS