{kind=link}
PROCESS
THIS IS HOW I GOT THERE
↓
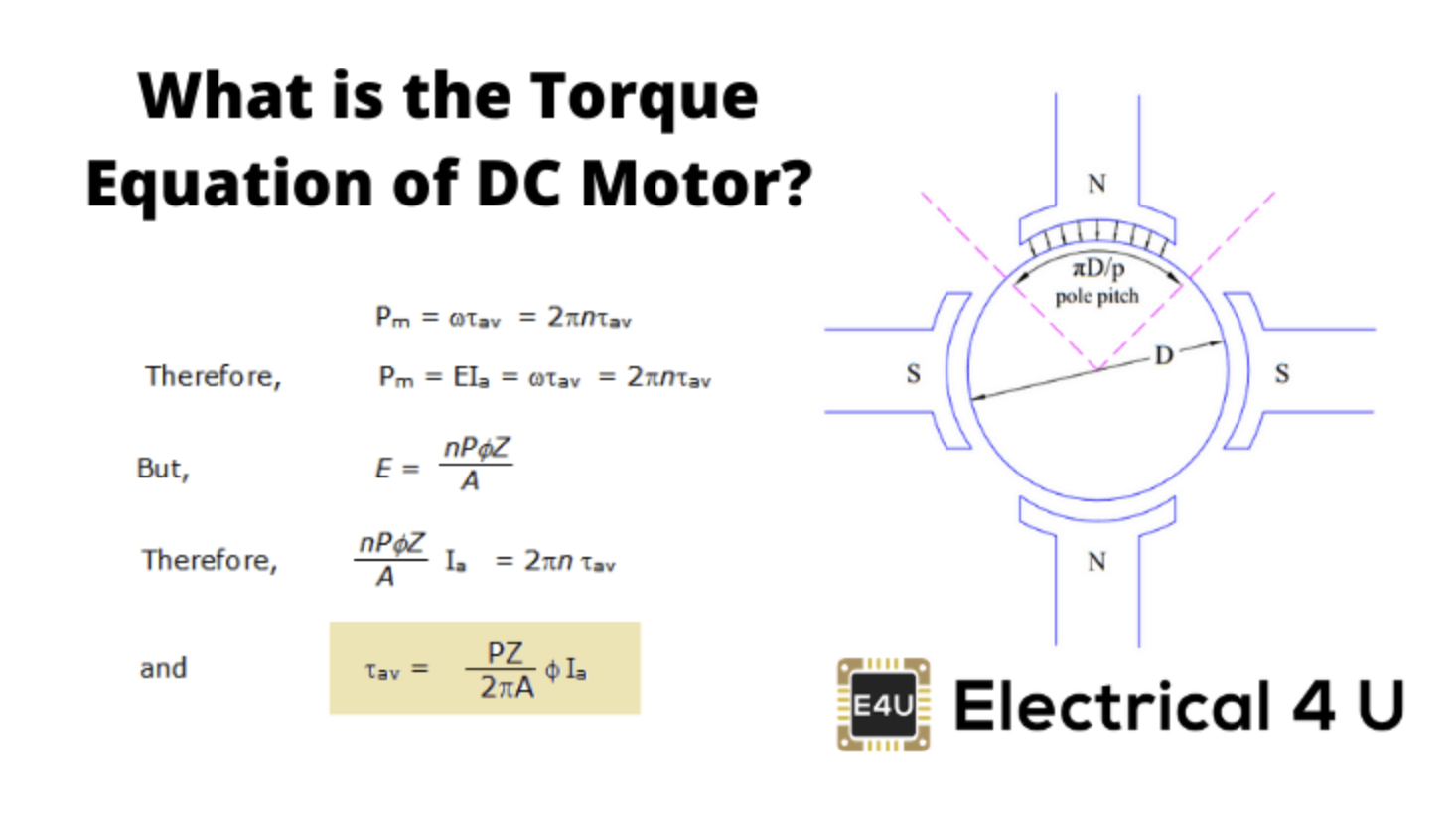
The torque is propotional to I or V.
The H bridge circuit that could control the motor to rotate forward and backward.
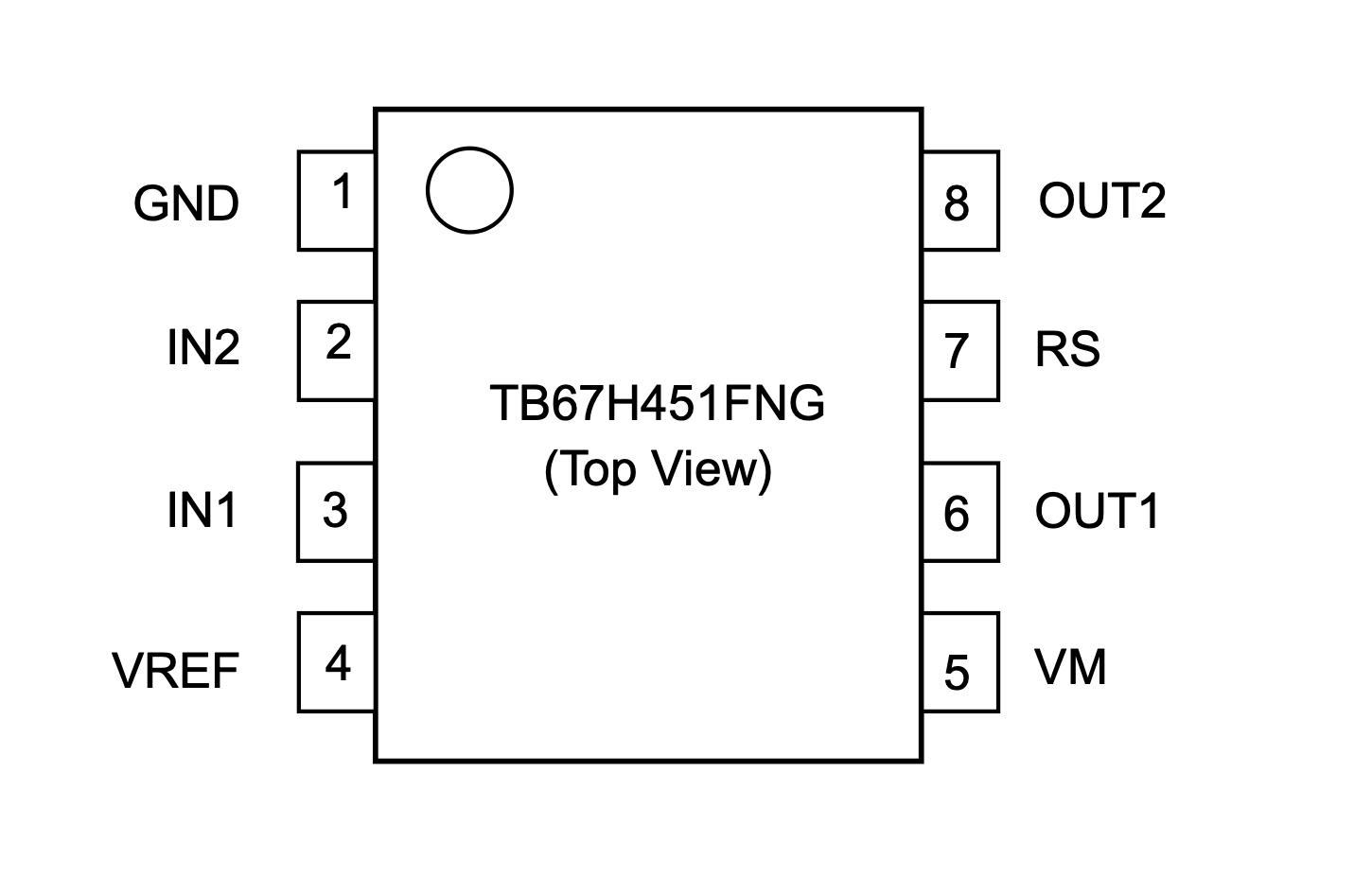
The pin layout of the TB67H451FNG motor driver.
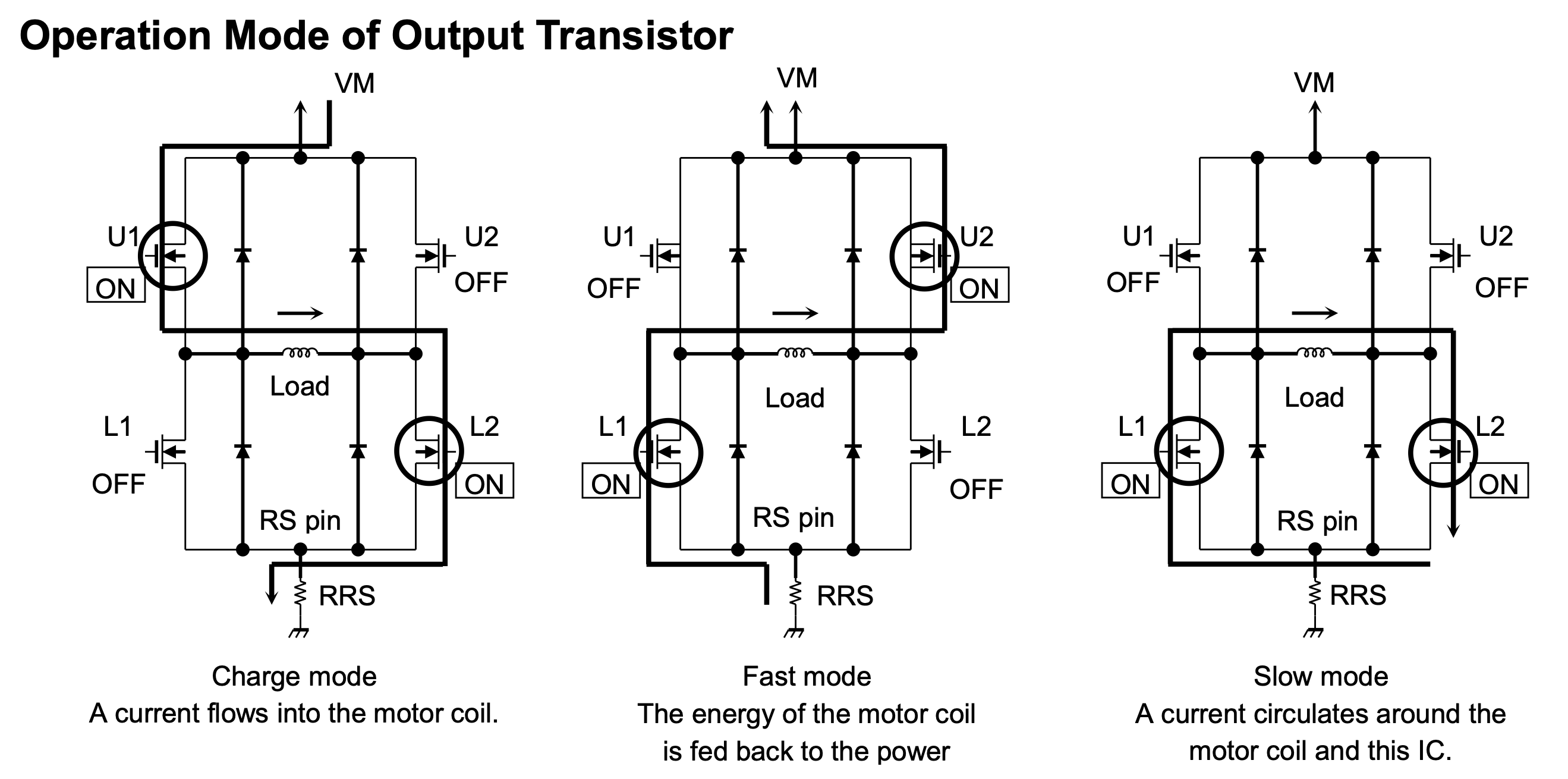
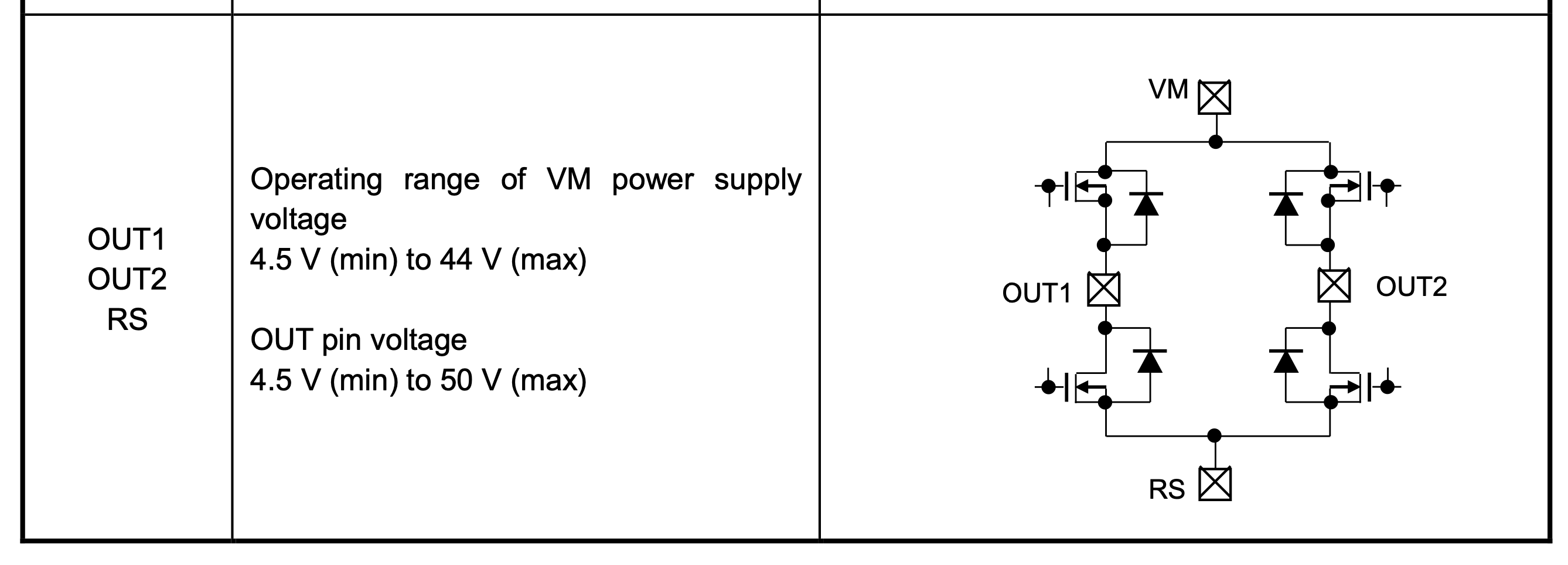
The operation modes of the circuit in the driver.
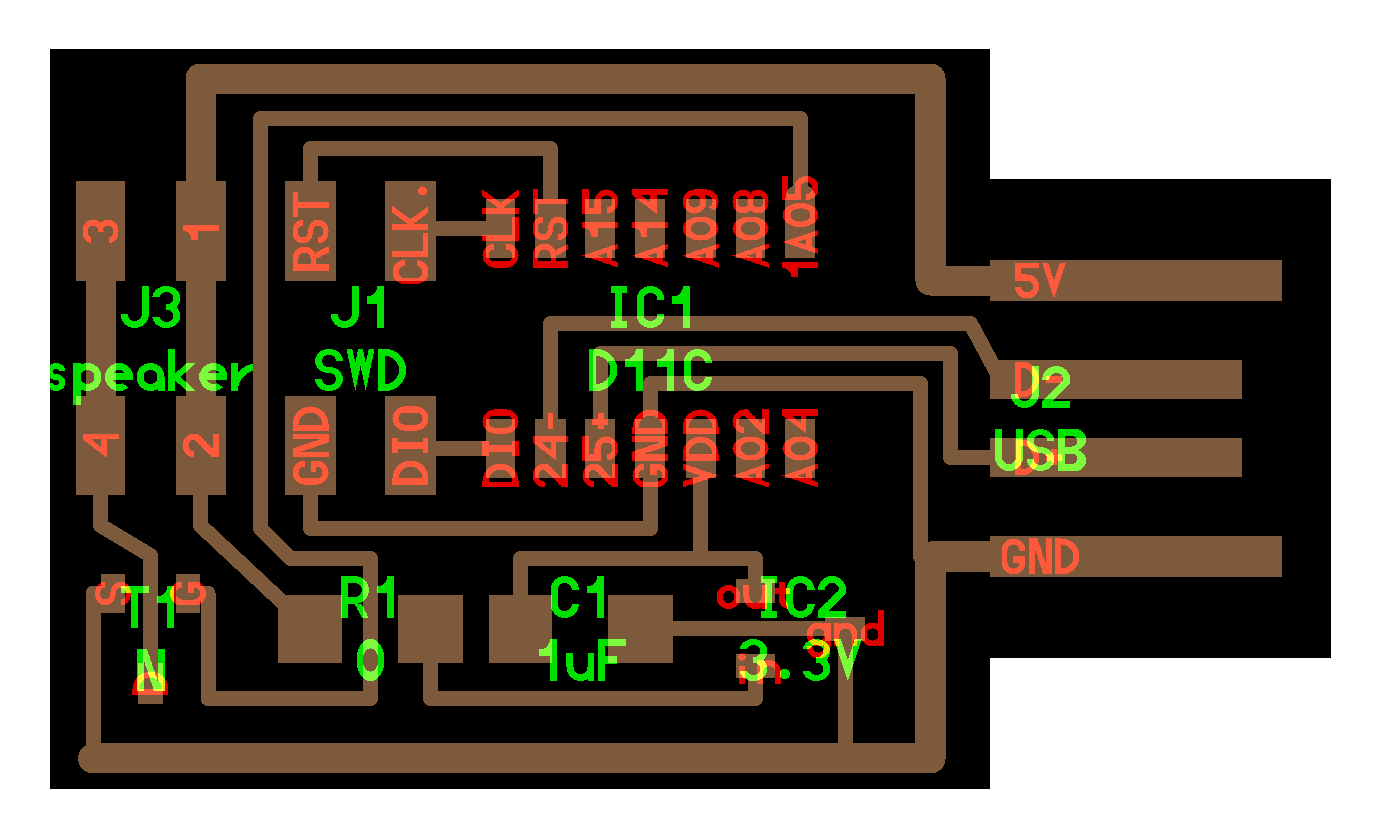
The motor with board.
The motor running.