
Our ideation session break down: Firing speed
The firing speed was initially intended for us to be able to vary the speed of the motor that would be firing the tissue paper. This would affect how far the toilet paper is to be shot. We initially considered a potentiometer or a joystick to control this function.
We decided not to control firing speed as it did not seem to have a great useful effect on tissue firing.
Firing toiler paper
For input to control toilet paper dispensing, we wanted to have a toggle that would control if the dispensing would be automated or manual. Manual would allow for firing to occur along with the manual controlling of the positioning to target and fire. Automation would allow us to run at a default speed where the toilet paper could be dispensed for a certain amount of time or user tracking.
A button will be used for this toggle.
Rotation on the Z axis
We wanted the shooter to be able to work like a tank. For rotation around the z-axis, it would enable us to direct the shooter to the left or right for targeted firing.
We decided that a potentiometer or joystick should be used for the input values that will control the output of the motors.
Rotation tilt
Tilting would give us the ability to move the firing head up and down for a wider firing range. We decided that a potentiometer or joystick should be used for the input values that will control the output of the motors.
We decided not to have motion in this direction for the scope of the machine and to fit into the timespan we have.
Reverse mode
A key consideration was that we did not want to waste a ton of toilet paper, so we wanted to be able to reverse the toilet paper roll after firing. We realized that this could be controlled by the same toggle that will trigger the dispensing of toilet paper.
Track Target
A consideration was to use facial recognition and body/person tracking to control the direction of the firing mechanisms and dispensing. This would give us the ability to follow a person and fire at them while they are detected. The direction of the tilt and rotation plus the firing mechanism would be triggered by the detection, which has the added benefit of tracking versus only detecting.
Driving
In initial considerations, we considered having the shooter be mobile on four wheels. The idea behind that decision was that the machine could follow an intruder to continue firing toilet paper. We planned to use joysticks to control the drive motors as an easy way to drive around.
We decided this was out of scope for the timeframe but would be something to do in the future.
When empty/time to reverse
In order to not waste a ton of toilet paper, we wanted to be able to rewind up the toilet paper roll. This means that we would need to detect when the paper runs out. We ideated on a couple of input options for this challenge.
Gyroscope
Using the measure of orientation and angular velocity to determine the amount of rotations it would take for the toiler paper roll to be finished, then that variable can be used to know when the limit has been reached and to trigger reverse.
Magnet
Using a magnet was a solution designed to allow us to create an encoder on our motor. From there we could design a counter based on the electrical signal and utilize that to control when the motor is reversed.
Motor with encoder
A motor with an encoder already on it would allow us to count the amount of rotations it would take to empty the roll. The benefit is that the motor has an encoder.
The dispensing mechanism team let us know that the motors we had available with encoders did not have the power needed to dispense the toilet paper at the desired ideal rate.
Light sensor
A light sensor could be used to detect the change in color between the white or the toilet paper and the brown of the roll.
Scale
Detecting the weight of the toilet paper roll changing using a pressure sensor or scale was considered.
We opted against the option due to variations in toilet paper rolls and a lack of options for placement in the mechanical design.
Offset switch
This idea was to have a clamp under the toilet paper roll tube and on top of the toilet paper. Once the clamp was within a certain range or pressing together on both ends, it would trigger the reversal.
This idea was not compatible with the desired mechanical design, and we were hesitant about how the reversing of the role would be able to go smoothly. It seemed more complicated than it needed to be.
Intruder detection
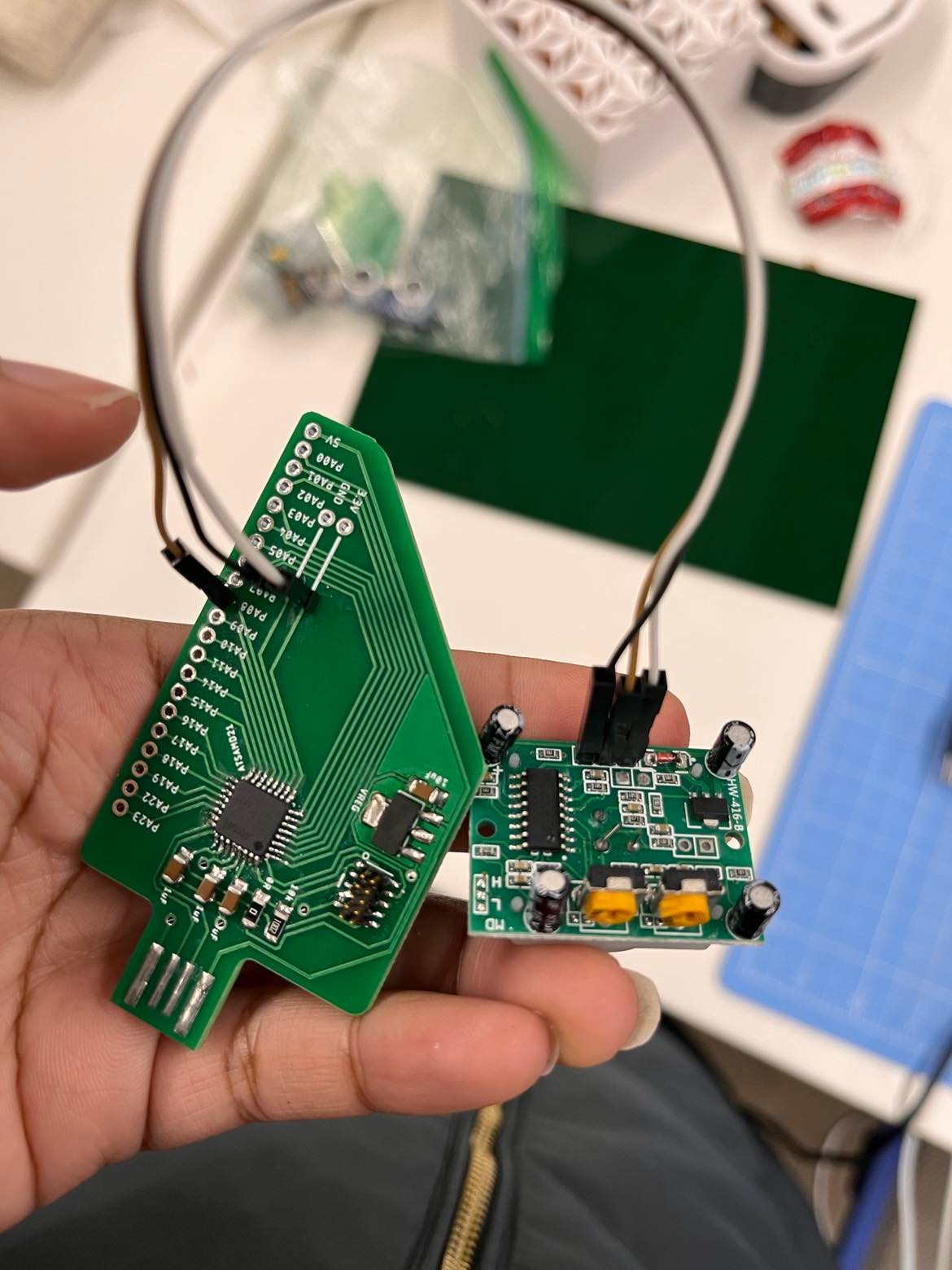
We needed to detect when a person was within a certain range to trigger the machine's start. The PIR and ultrasonic sensors were considered for this. The PIR detection uses heat to detect when a person is within a wide range. The ultrasonic sensor worked similarly since it sent out a signal to echo back, which is used to calculate the distance of an object.
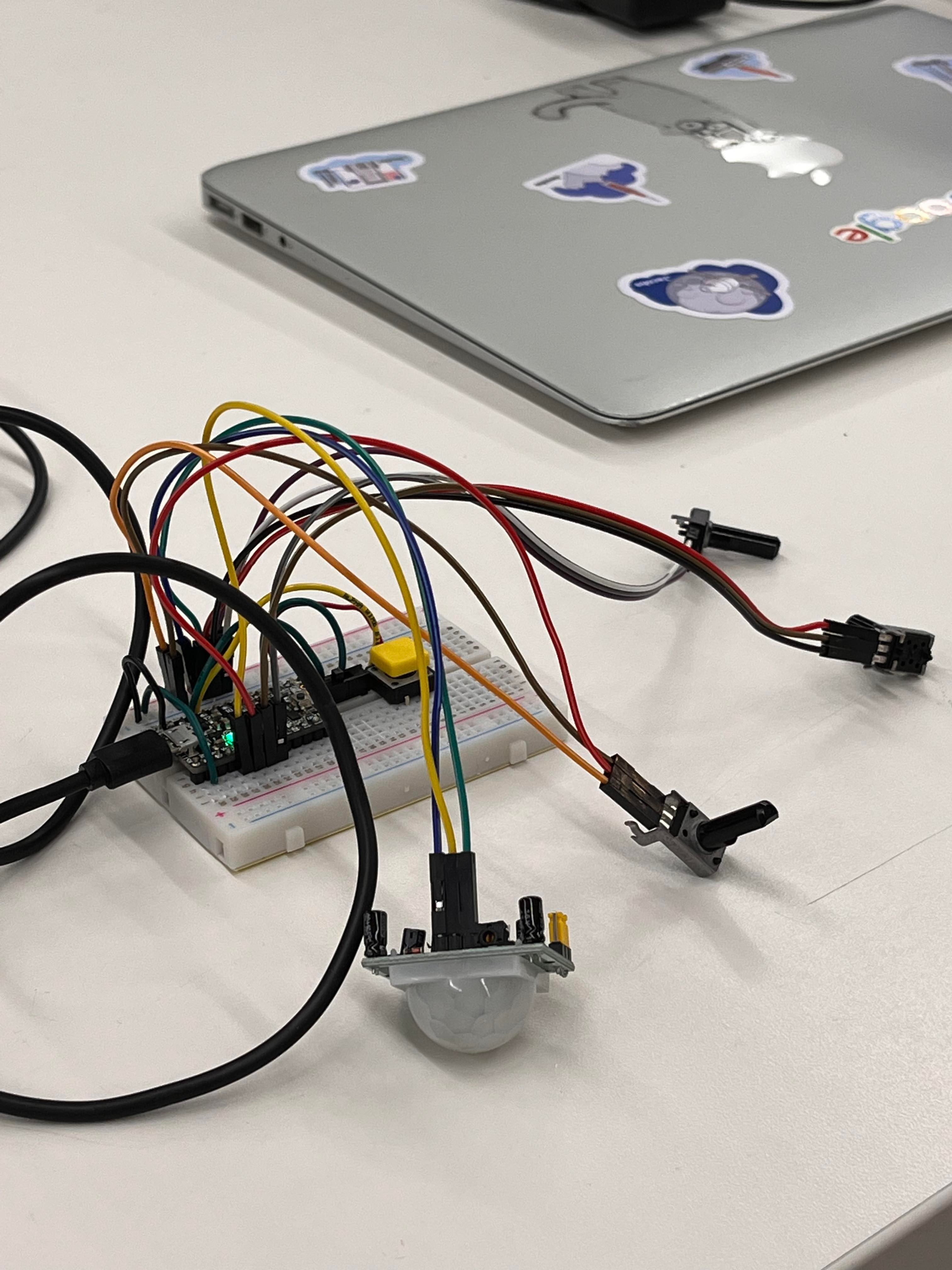
The PIR sensor was very sensitive and did not seem to accurately read the detection of a person. We created a shielded tunnel for it which increased the detection accuracy. We adjusted the potentiometers on the PIR to adjust the sensitivity and timing delay. With changing and manipulating these features, we were able to get a fairly responsive reading. We connected an LED that was triggered when an object was detected to give more visual output since we were reading values from all of the sensors. The ultrasonic sensor had the benefits of being able to adjust the ping rate and distance from the object that we wanted to detect. This gave us a more focused range, but the timing delay did not allow for the program to be responsive as quickly as we would like. We concluded that the ultrasonic may be best for close range detection The potentiometers worked and displayed the desired range of values based on turning. This worked effectively, returning values of 0 and 1 depending on the state.
I was tasked with soldering one of the blank modular boards. Unfortunatley, I damaged the D21 when I tried to separate pins that were soldered together, and we didn't have backups, so I soldered pins to the dev board we made to connect to the PIR sensor.
We then had modular things explained to us by Leo and Quentin. They demoed a motor being controlled by a potentiometer.
I also assisted with the testing of the marble release system timing and desired launching area.
Lastly, I did the documentation for the input team and assisted other sub-teams on smaller tasks as needed.