Week 2
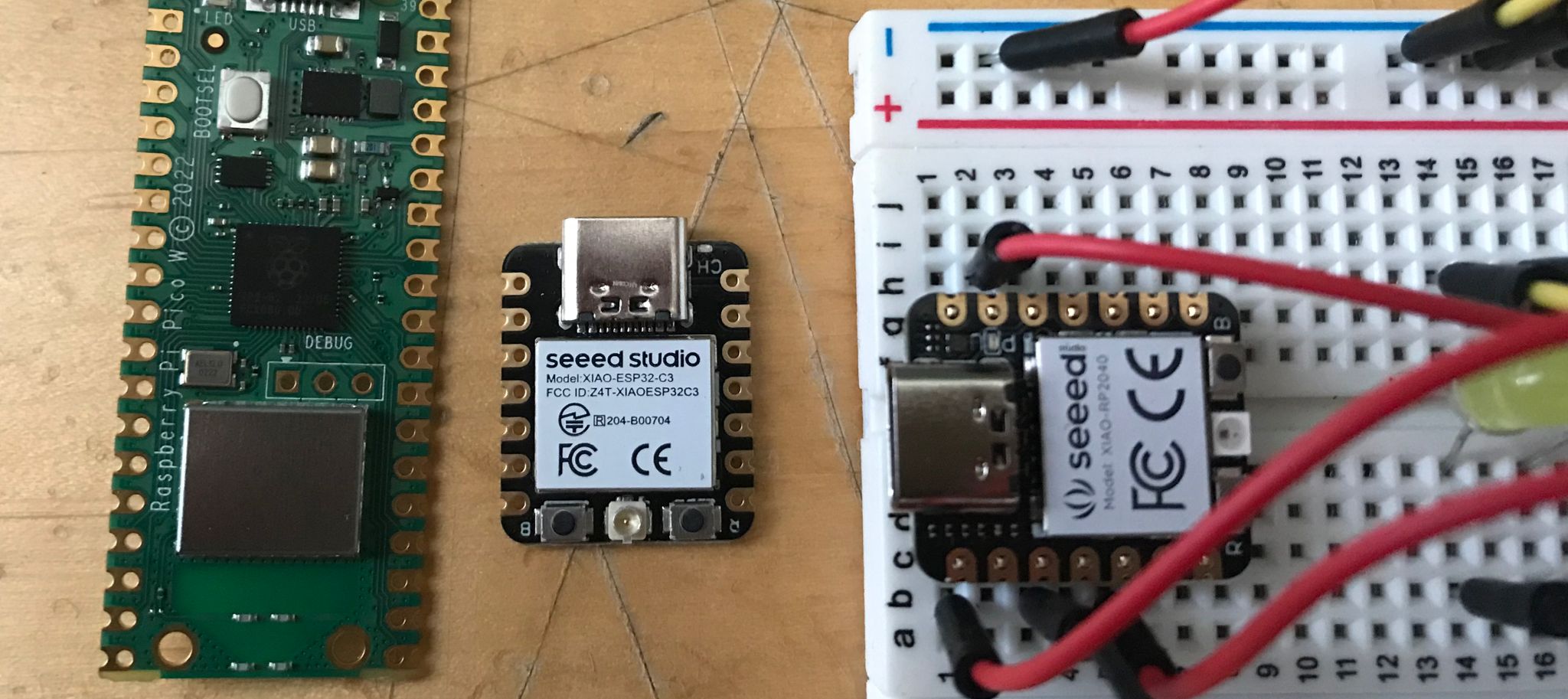
This week I got experience with some embedded programming. I have had a few problems regarding the connection but turned out I have learnt a lot of things that I had no idea. I wanted to compare three microprocessors: seeed RP2040, seeed ESP32-C3 and Raspberry Pi Pico
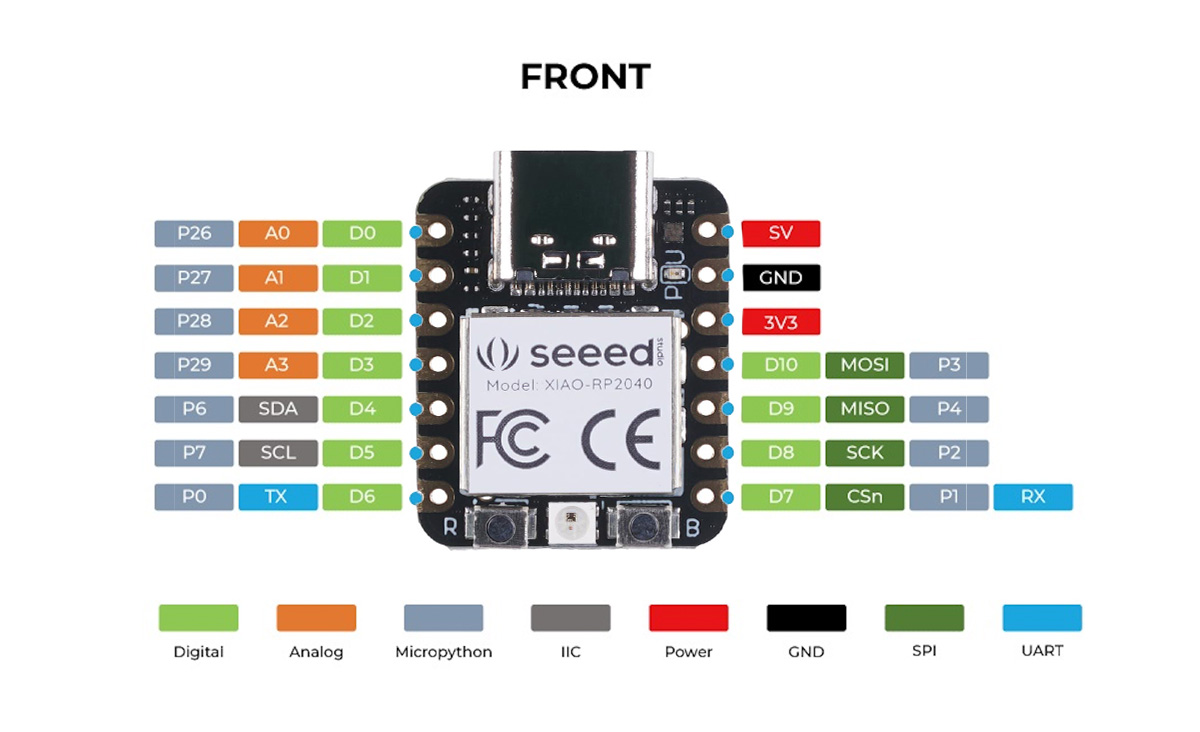
First I tried a very basic code with Arduino IDE, using seeed RP2040, the purpose of this practice was to light 3 external LEDs with some delays in between, here is the code below:
int ledPins[] = {D0, D2, D4}; // Define the pins for the LEDs
void setup() {
for (int i = 0; i < 3; i++) {
pinMode(ledPins[i], OUTPUT); // Set LED pins as OUTPUT
}
}
void loop() {
for (int i = 0; i < 3; i++) {
digitalWrite(ledPins[i], HIGH); // Turn on the LED
delay(500); // LED on for 0.5 seconds
digitalWrite(ledPins[i], LOW); // Turn off the LED
delay(500); // LED off for 0.5 seconds
}
}
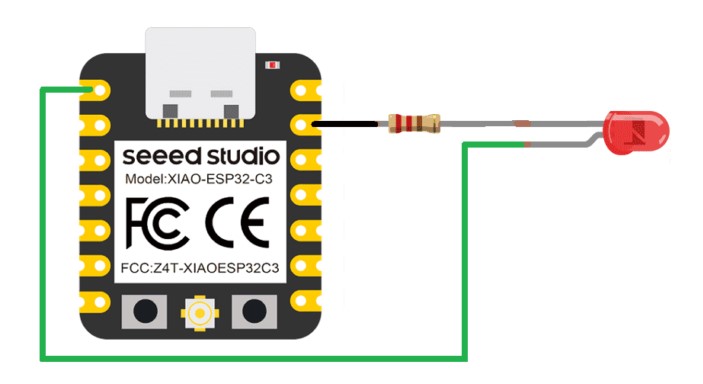
The second LED test was with ESP32-C3, with a simple code I was able to manage using the board and lighting up an LED
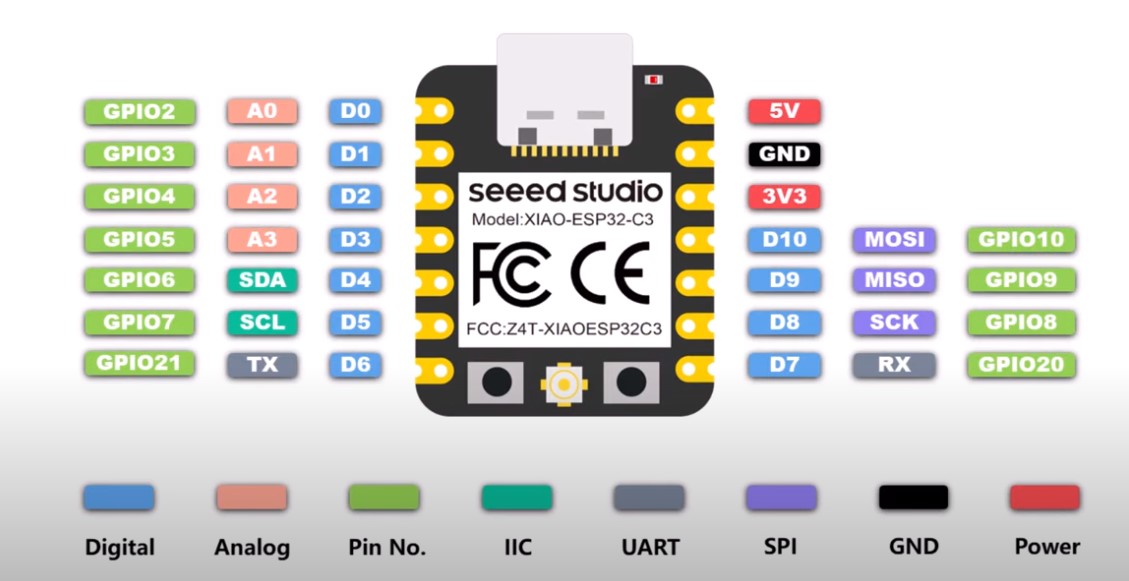
First I tried a very basic code with Arduino IDE, the purpose of this practice was to light 3 external LEDs with some delays in between, here is the code below:
#define LED_BUILTIN 2
// the setup function runs once when you press reset or power the board
void setup() {
// initialize digital pin LED_BUILTIN as an output.
pinMode(LED_BUILTIN, OUTPUT);
}
// the loop function runs over and over again forever
void loop() {
digitalWrite(LED_BUILTIN, HIGH); // turn the LED on (HIGH is the voltage level)
delay(1000); // wait for a second
digitalWrite(LED_BUILTIN, LOW); // turn the LED off by making the voltage LOW
delay(1000); // wait for a second
}
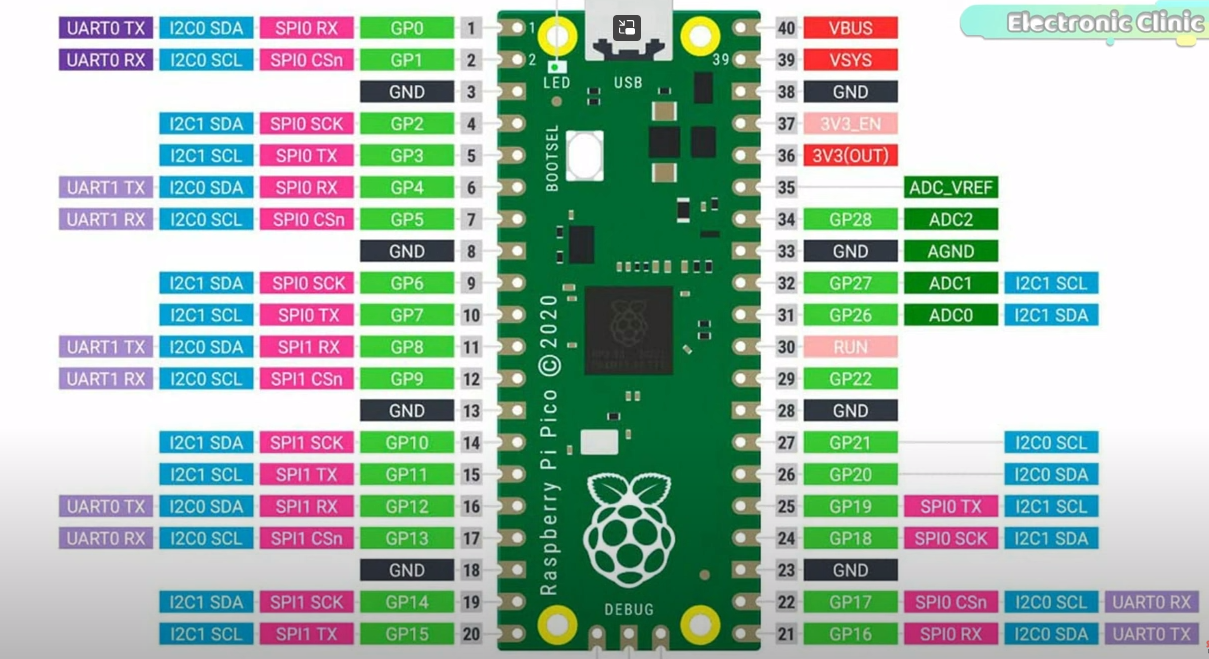
I wanted to try Raspberry Pico as well but unfortunately I couldn't connect it to my computer, each time when I try to connect it terminated itself when I try to transfer the UF2 file into my microprocessor files.
I am still trying to figure out the reason but based on my research, Seeed looks better and more efficient.
But nevertheless, I checked the datasheet and schematic looks like below:
Lastly, I wanted to write a code that controls servo motor with webcam camera with facedetection from opencv, unfortunatelly none of the microprocessors that I have been using was not compatible for that.
I used arduino Uno instead.
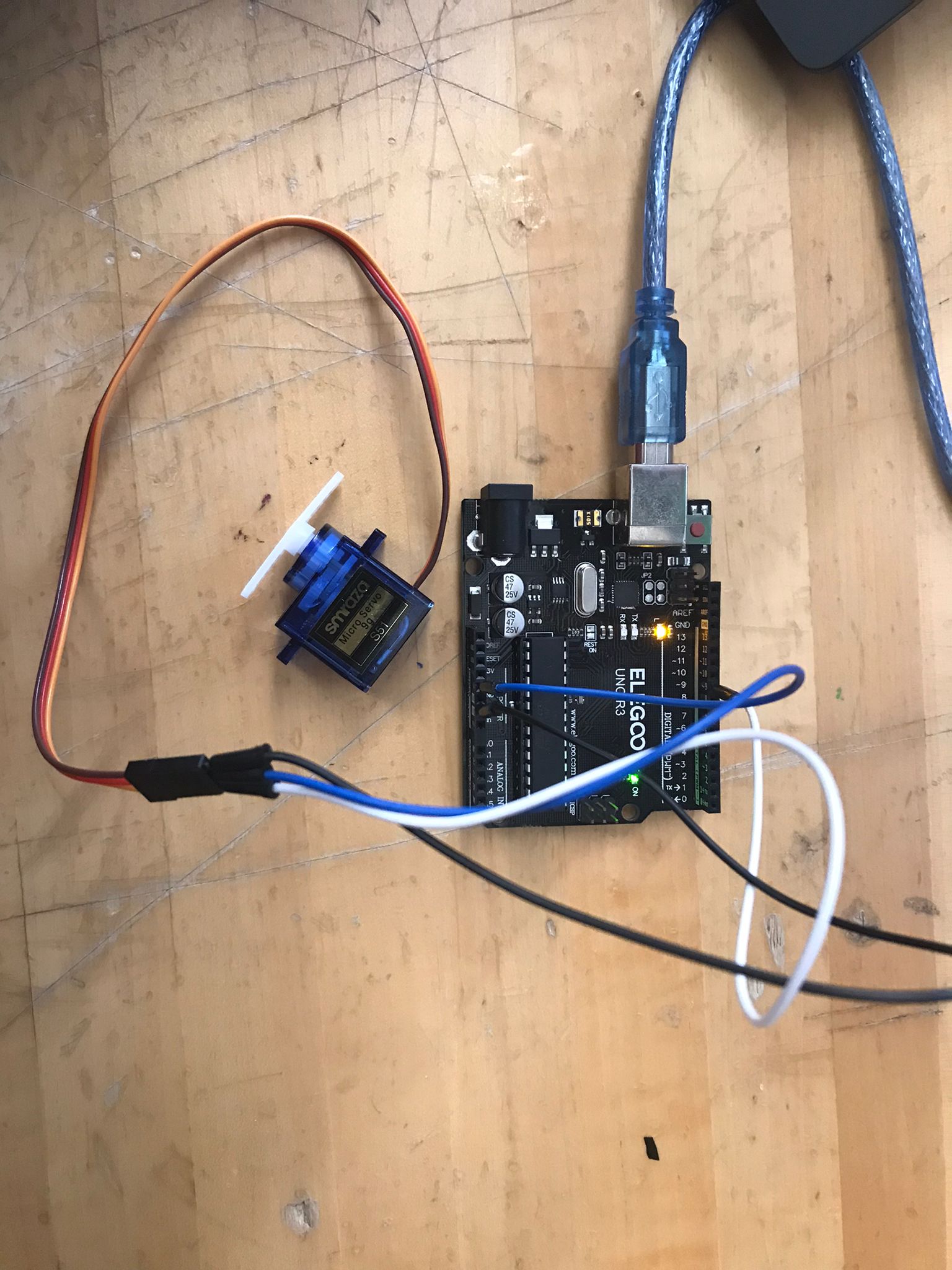
Here is the Phyton code below:
import cv2
import serial
import time
# Open a serial connection to the Arduino (change the port as needed)
arduino = serial.Serial('COM3', 9600, timeout=1)
# Load the haarcascades for eye detection
eye_cascade = cv2.CascadeClassifier(cv2.data.haarcascades + 'haarcascade_eye.xml')
# Open the webcam
cap = cv2.VideoCapture(0)
while True:
ret, frame = cap.read()
# Convert the frame to grayscale for eye detection
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# Detect eyes in the frame
eyes = eye_cascade.detectMultiScale(gray, scaleFactor=1.1, minNeighbors=5, minSize=(30, 30))
# If eyes are detected, send 'O' to Arduino (open the servo)
if len(eyes) > 0:
arduino.write(b'O')
time.sleep(1) # Wait for 1 second to prevent rapid servo movements
else:
arduino.write(b'C') # If no eyes are detected, send 'C' (close the servo)
cv2.imshow('Eye Detection', frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# Release the webcam and close the serial connection
cap.release()
cv2.destroyAllWindows()
arduino.close()
Here is the Arduino code below:
#include
Servo myServo;
int servoPosition = 90; // Initial position of the servo (adjust as needed)
void setup() {
myServo.attach(9); // Attach the servo to pin 9
myServo.write(servoPosition); // Set the initial position
Serial.begin(9600); // Initialize serial communication
}
void loop() {
// Arduino can receive commands from Python through serial communication
if (Serial.available() > 0) {
char command = Serial.read(); // Read the command from Python
// If the command is 'O', move the servo to the open position
if (command == 'O') {
servoPosition = 0;
myServo.write(servoPosition);
}
// If the command is 'C', move the servo to the closed position
else if (command == 'C') {
servoPosition = 90;
myServo.write(servoPosition);
}
}
}