SexBugs
Inspired by Hexbugs, Sexbugs are a more complicated tiny robot that is capable of traversing its environment with its legs, engaging in sexual intercourse with other sexbugs, communicating with other sexbugs, and evolving over time.

1. Electronics Production
2. Attempted Leg Production
3. Frame Production
4. Assembly

5. Interface Creation
I previously wanted to make an AI recorder, but I scrapped that due to lack of alignment with the class.
Electronics Production
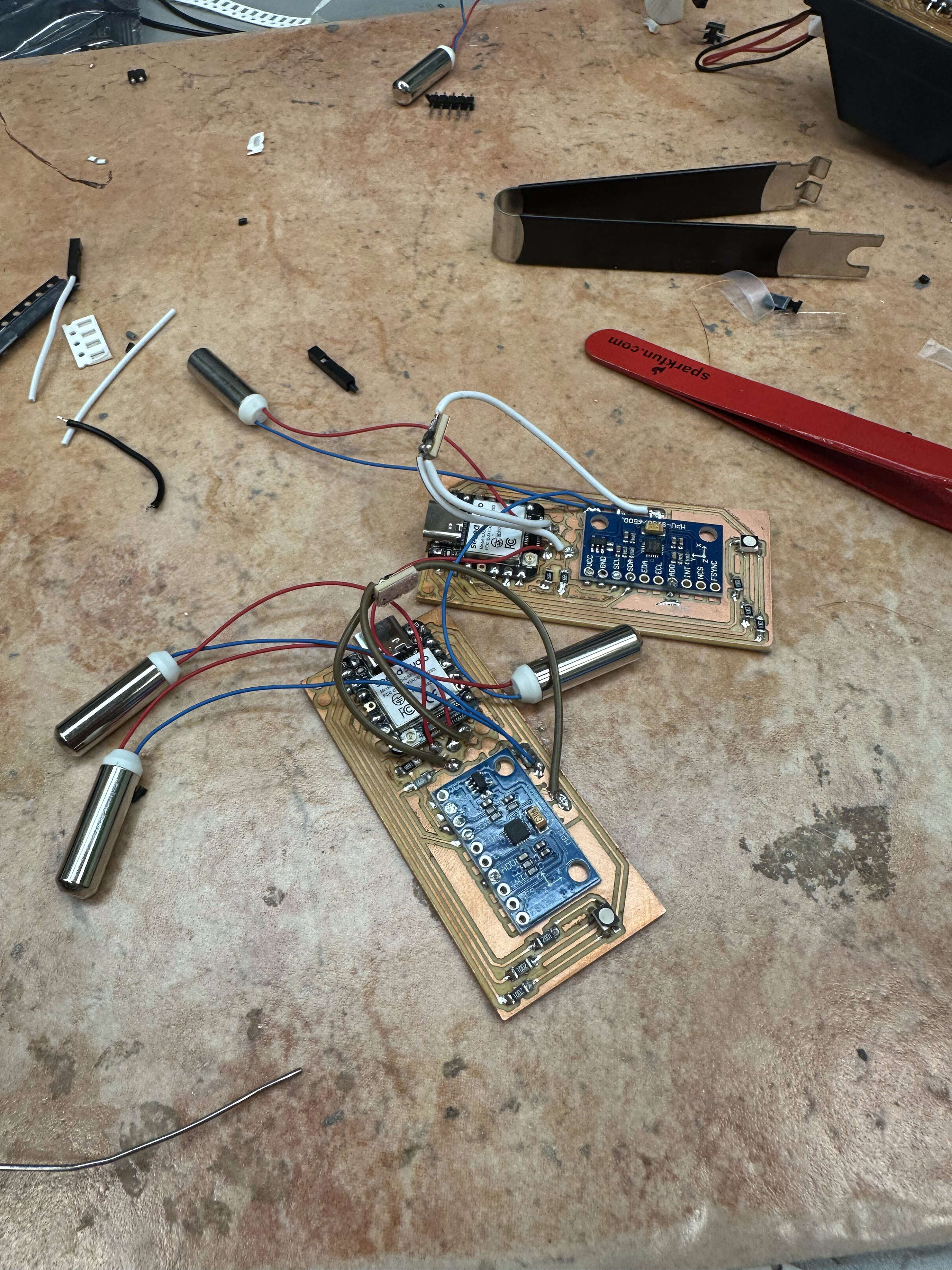
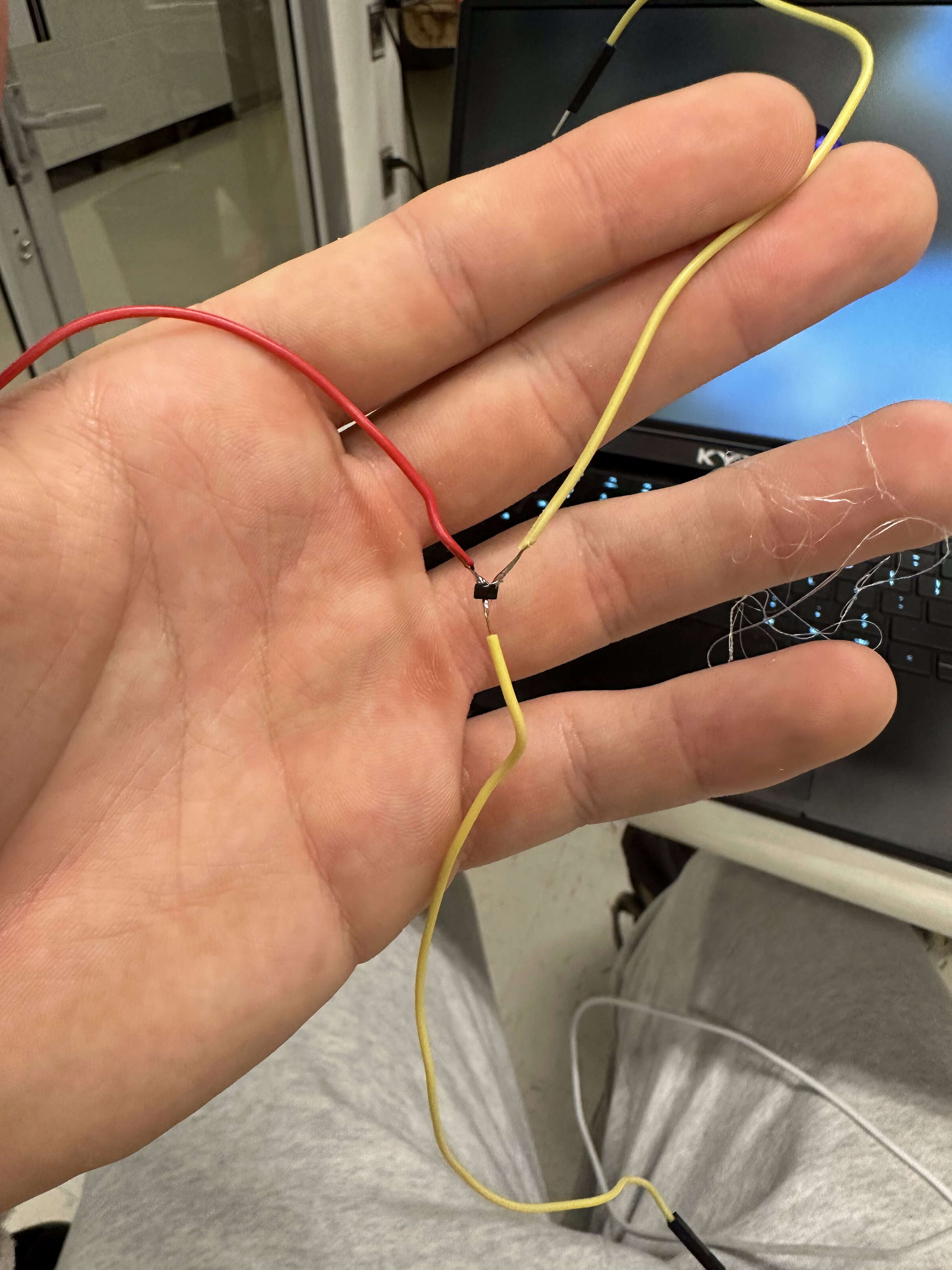
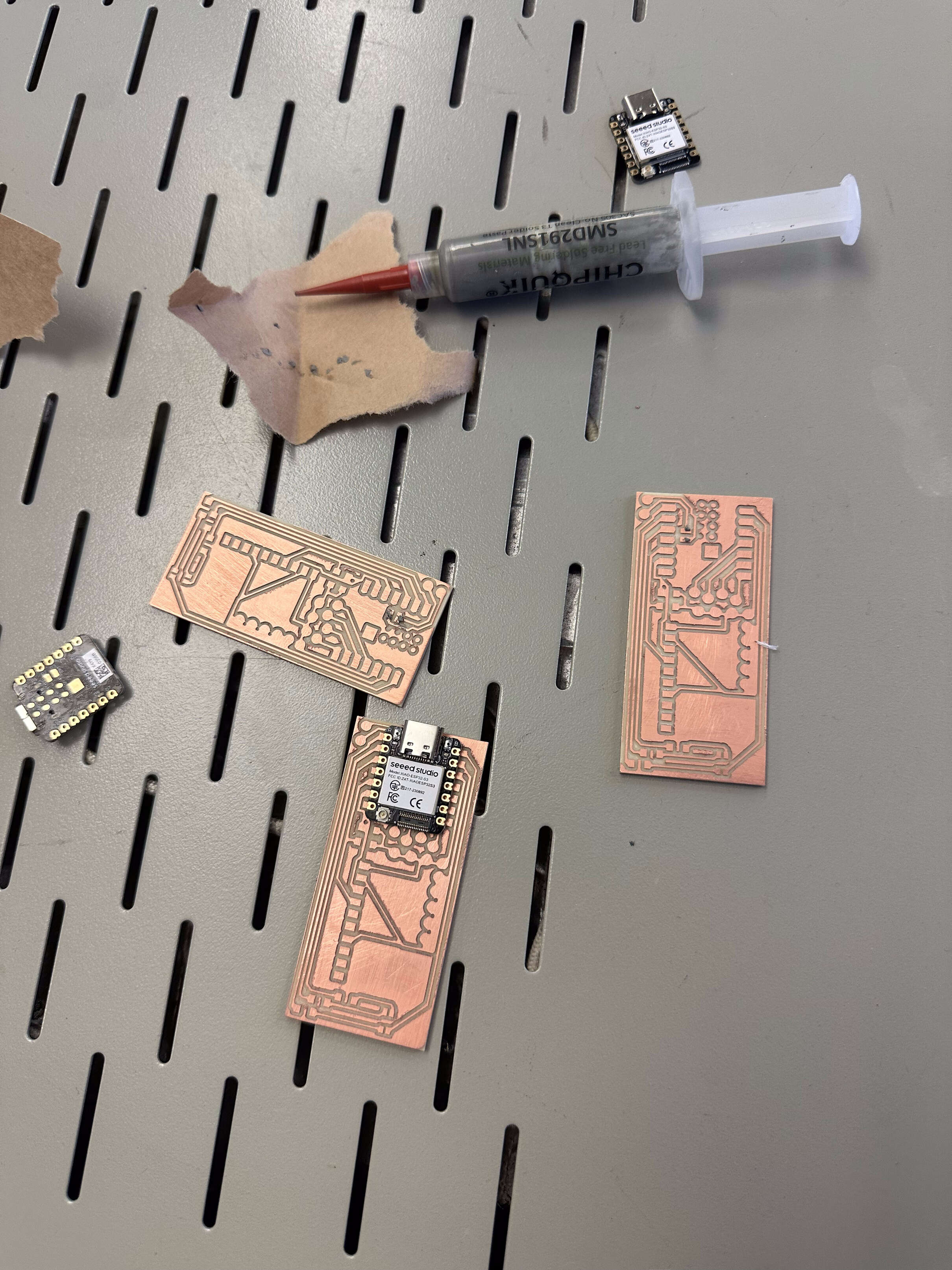
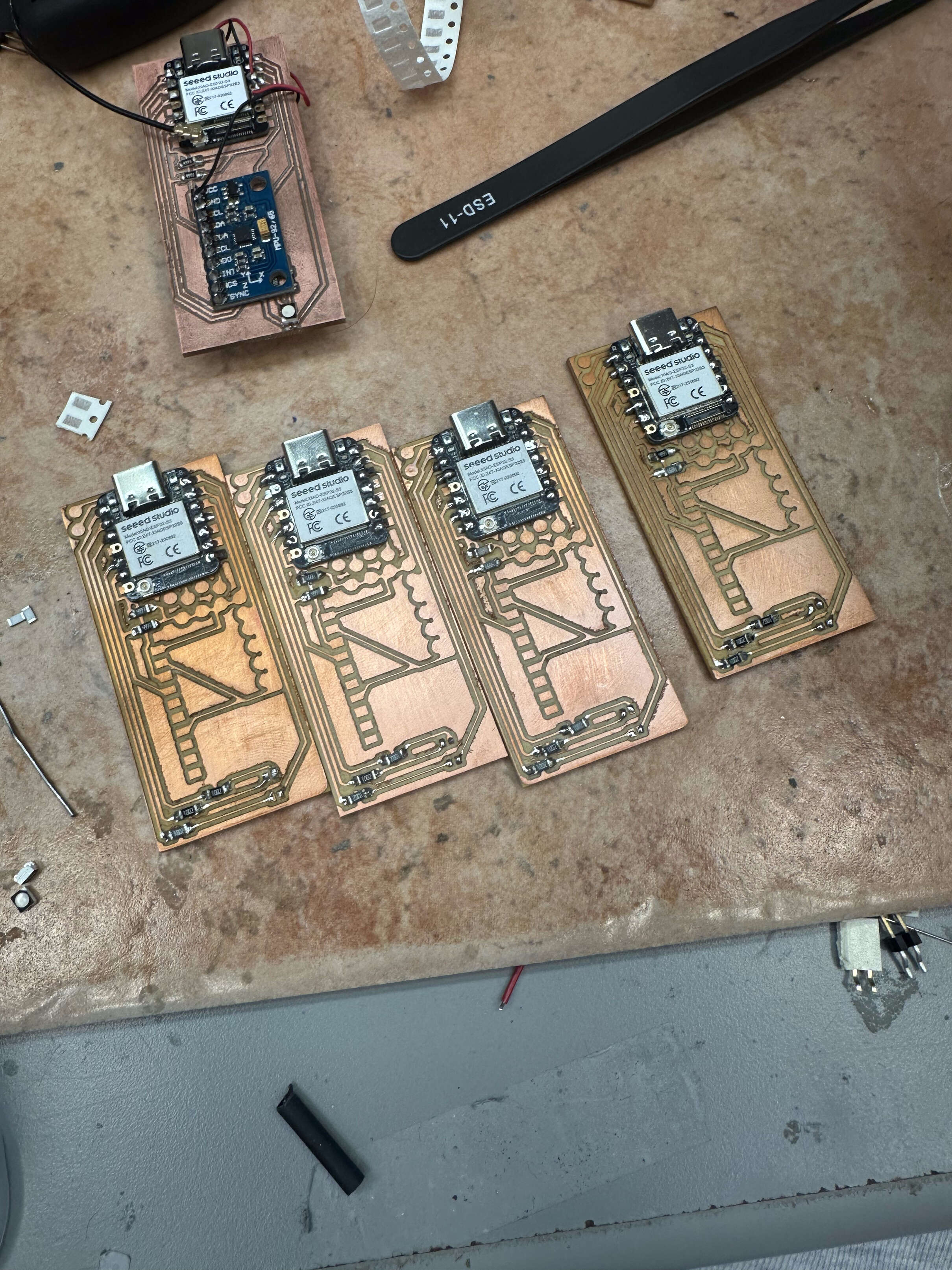
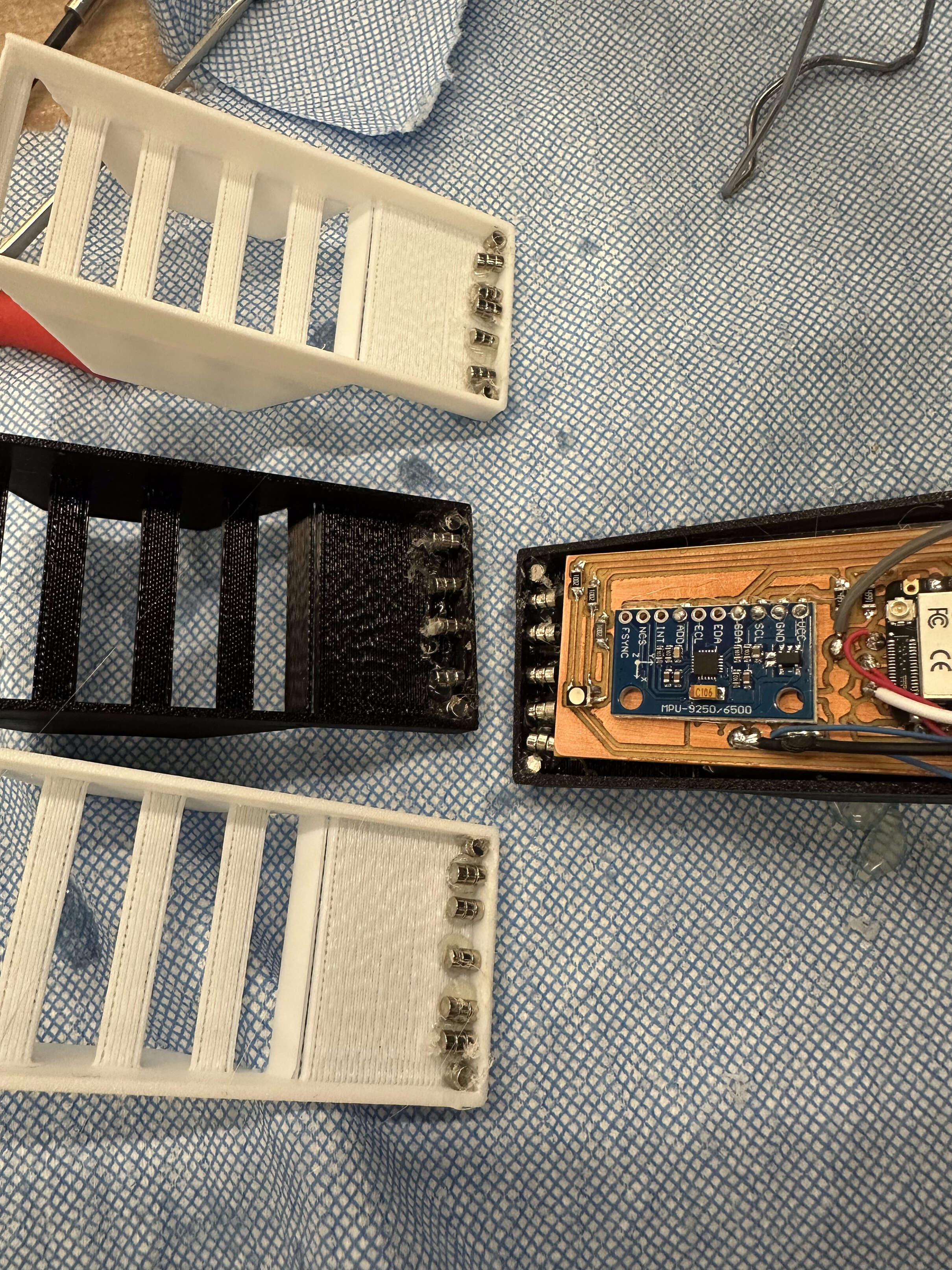
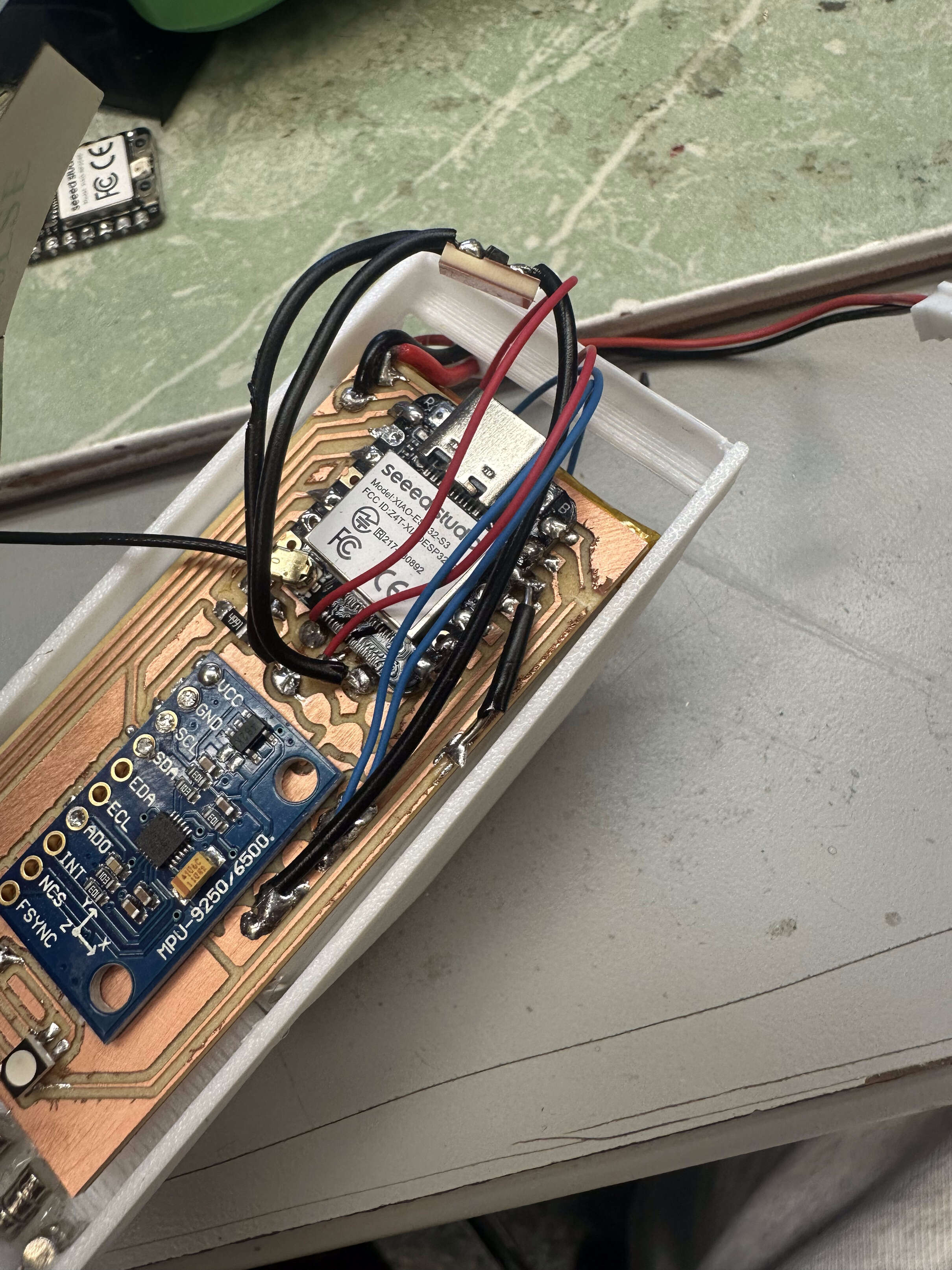
This section details the creation of the PCB. It contains 1 ESP32, 1 MPU9250, 1 vibrator motors, 1 RGB LED, and 1 Hall Effect sensor.First I solder a hall effect sensor to some wires to test it out and ensure it will work.
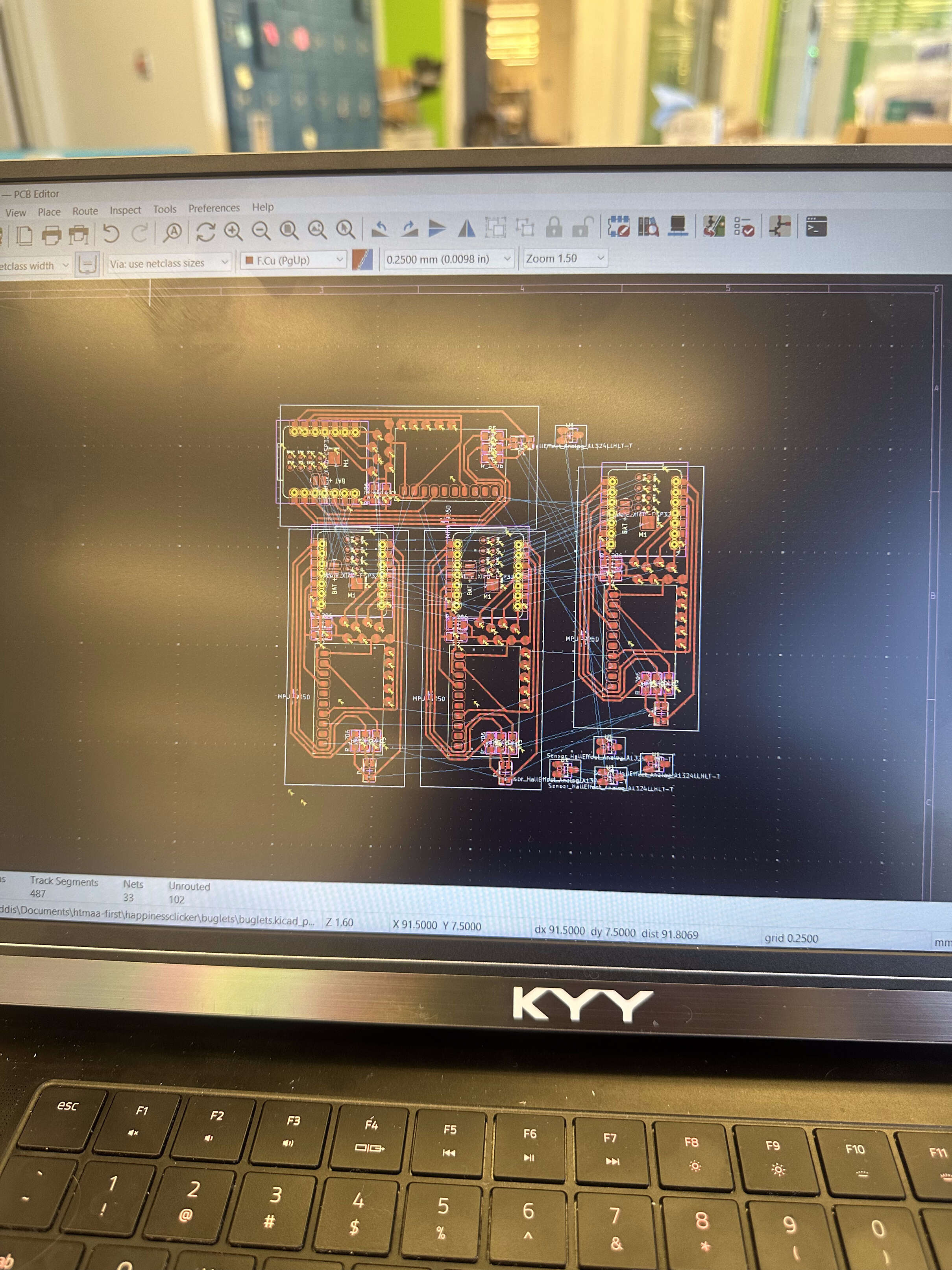
 I then design a PCB to include all of the parts. I create a separate PCB for the hall effect sensor since that will attach to the back of the frame.
I then design a PCB to include all of the parts. I create a separate PCB for the hall effect sensor since that will attach to the back of the frame.
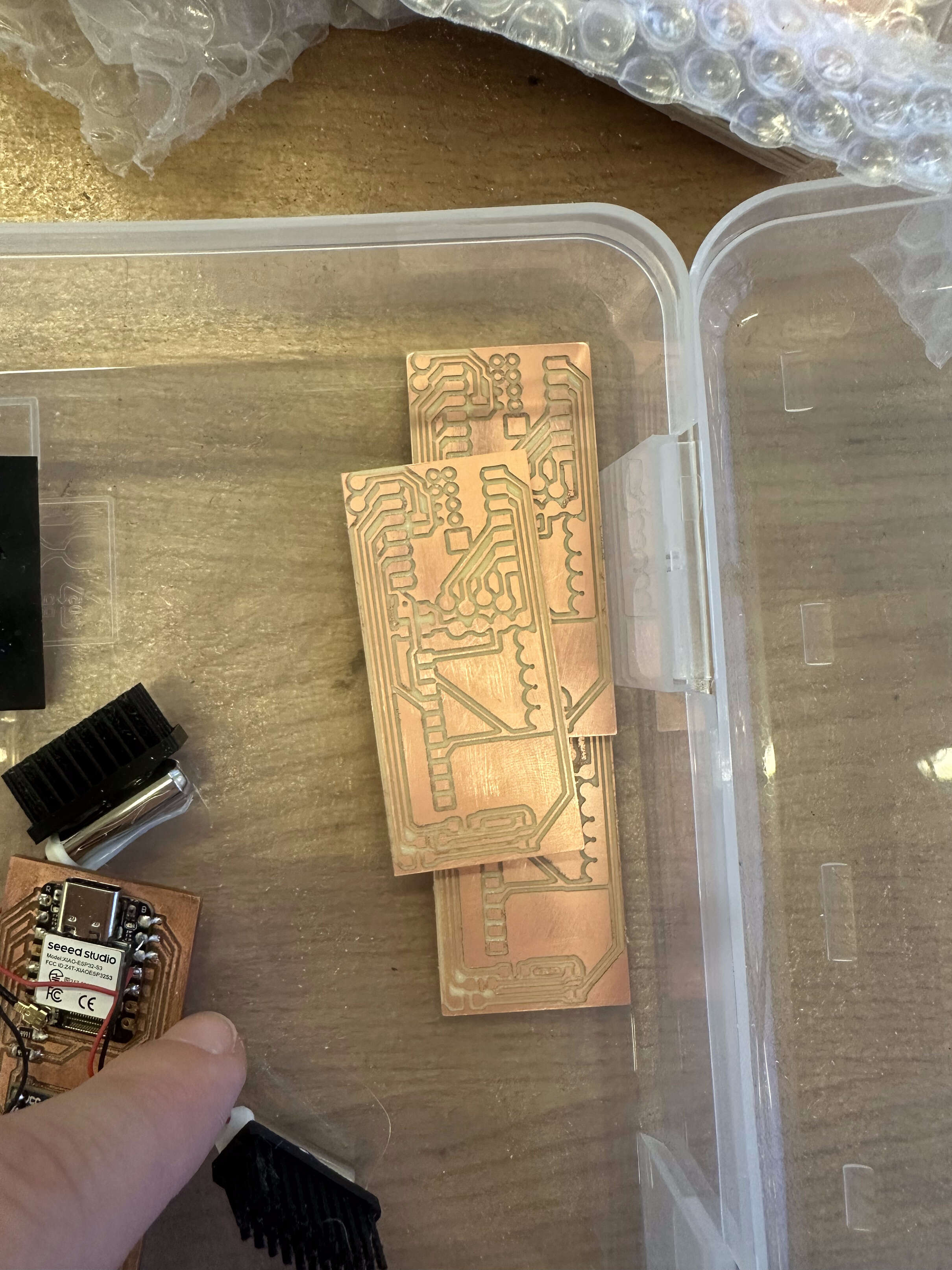
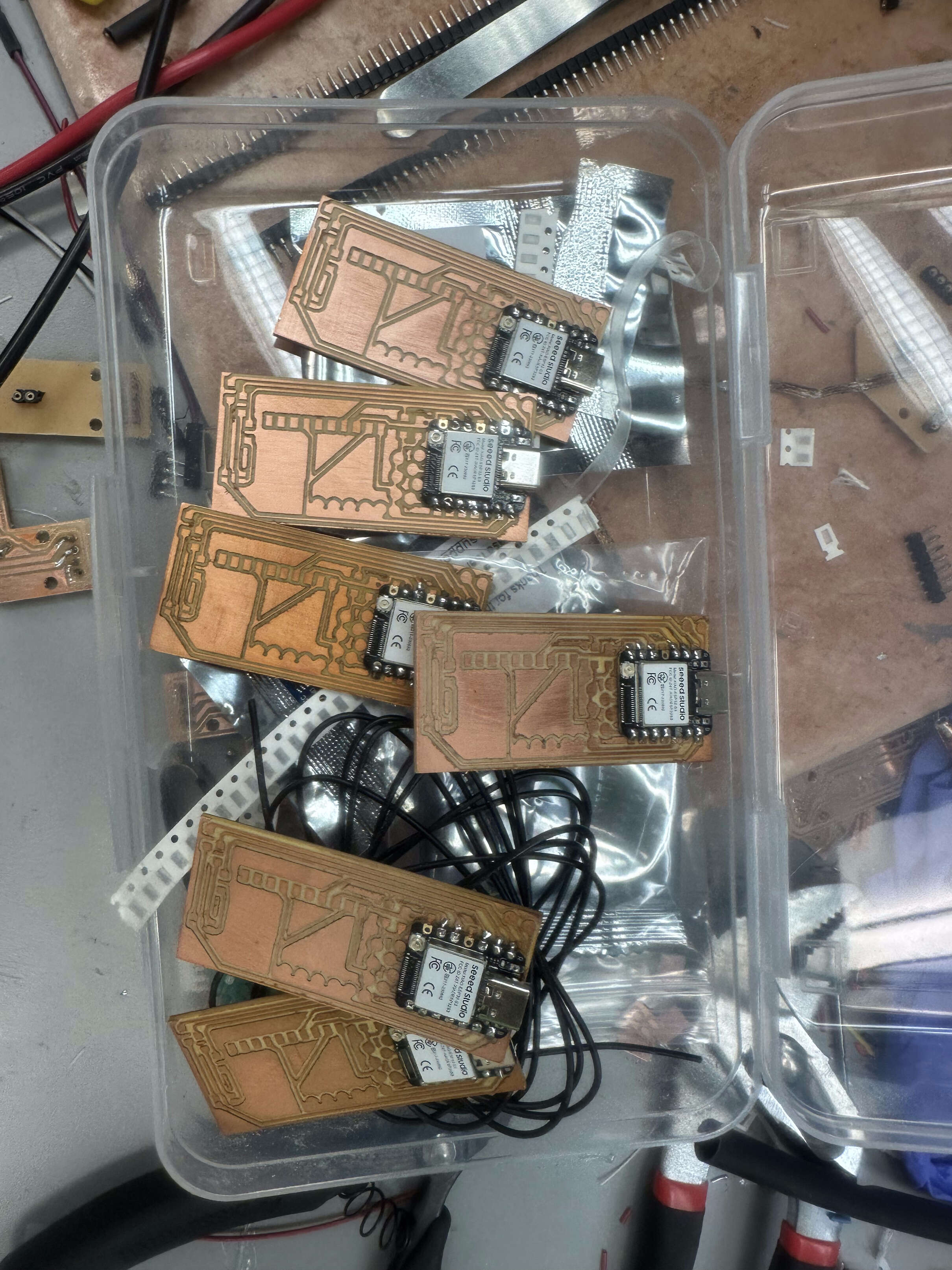
 After hot air gunning them all, we have 4 esp32s secured to pcbs
After hot air gunning them all, we have 4 esp32s secured to pcbs

Attempted Leg Production
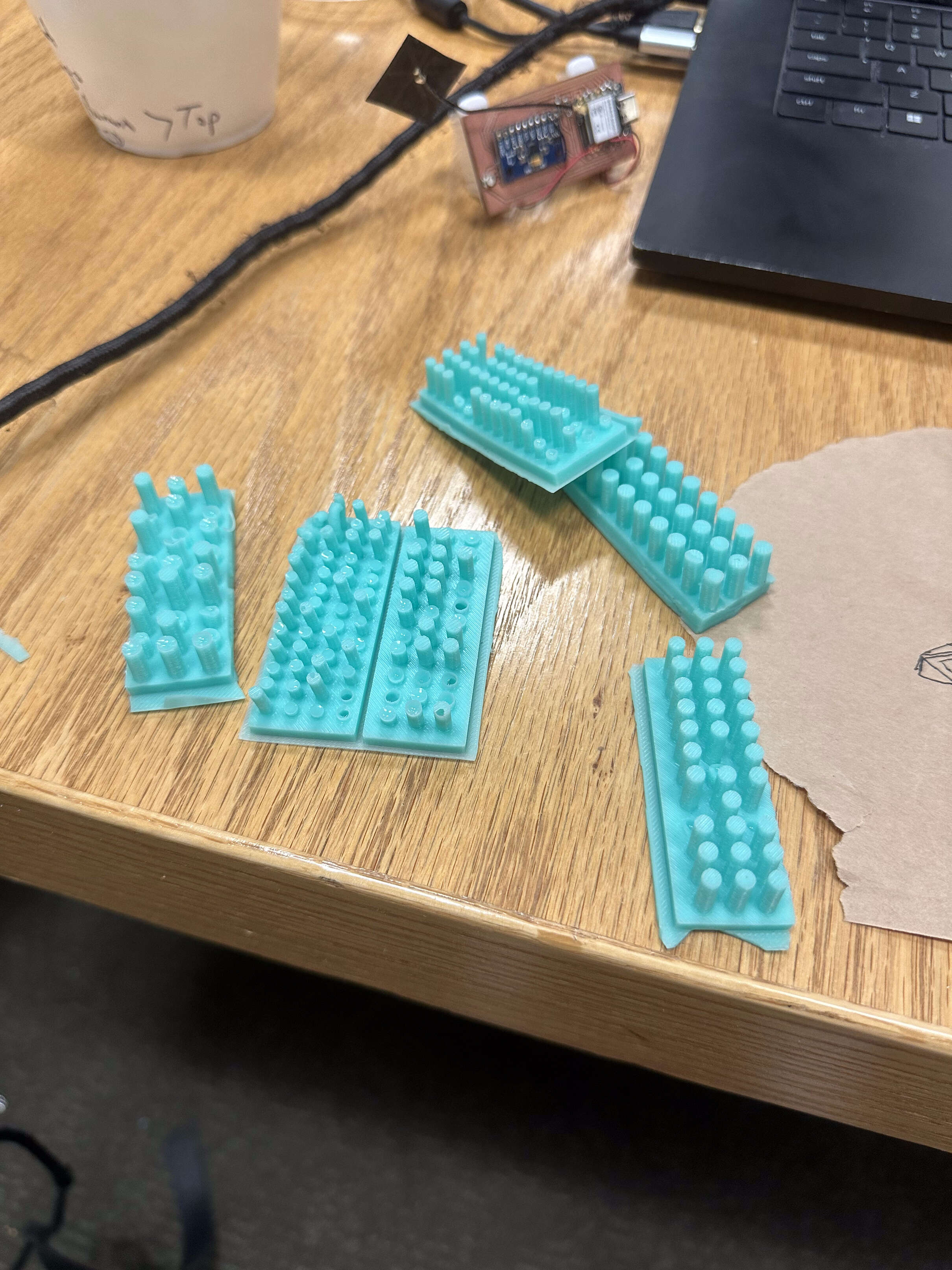
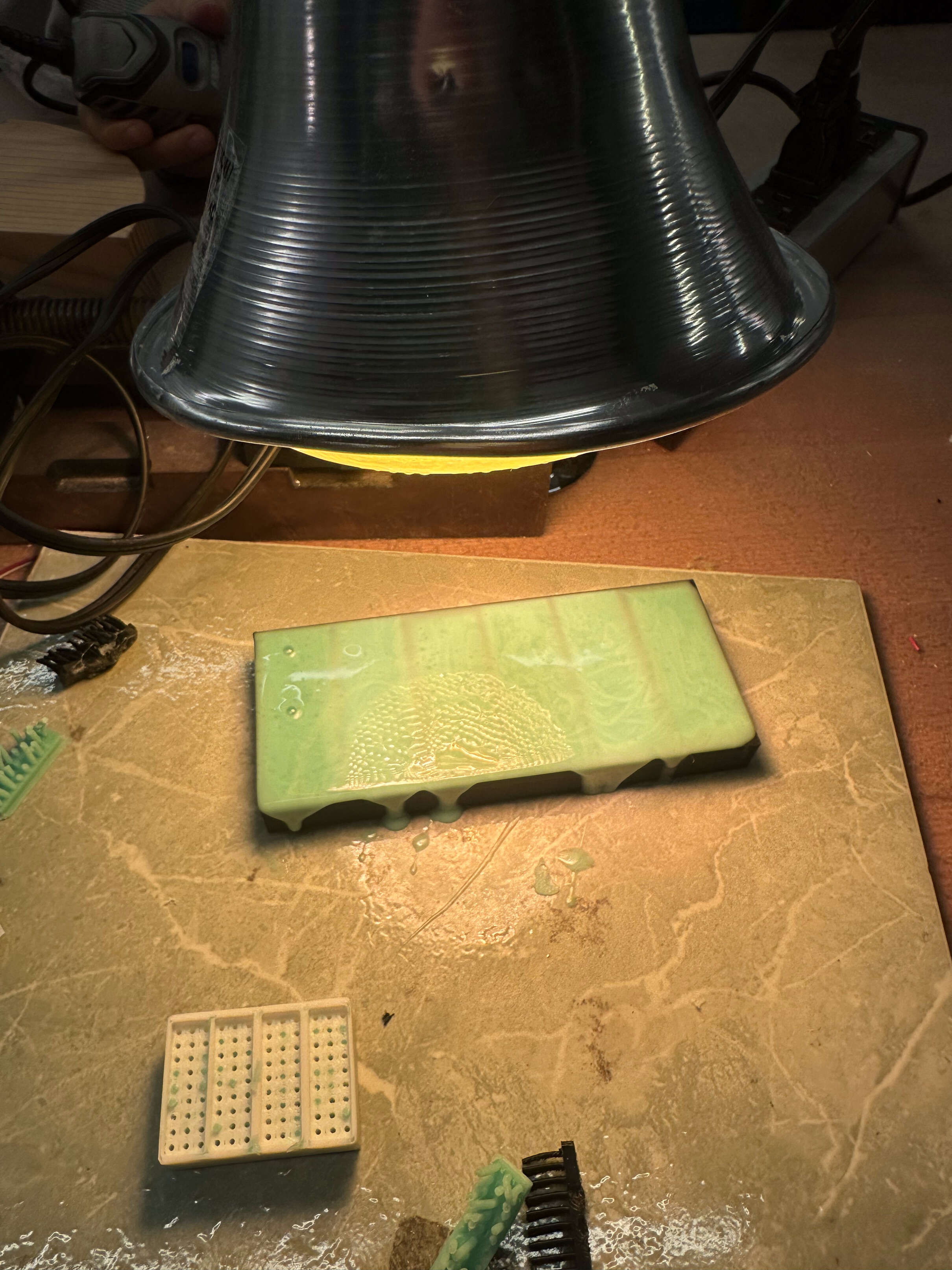
Hexbugs have rubber legs that allow them to move around - I wanted to see if I could come up with something that was more similar to actual hexbugs rather than a toothbrush. This ended up not working due to limitations in materials. I first start with a basic design and cast the mold
I first start with a basic design and cast the mold

 I made a mold with different leg thicknesses to avoid this issue.
I made a mold with different leg thicknesses to avoid this issue.

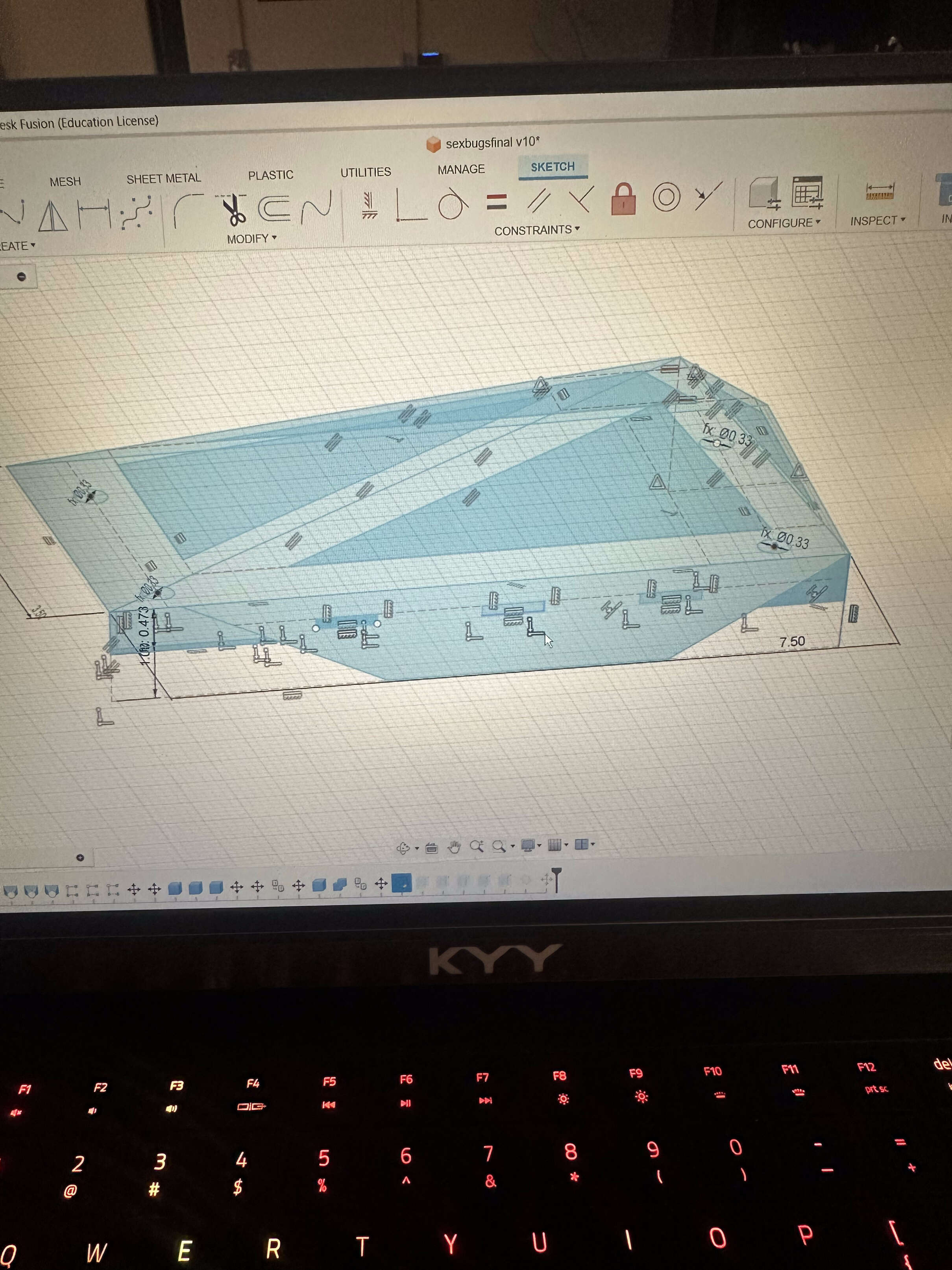
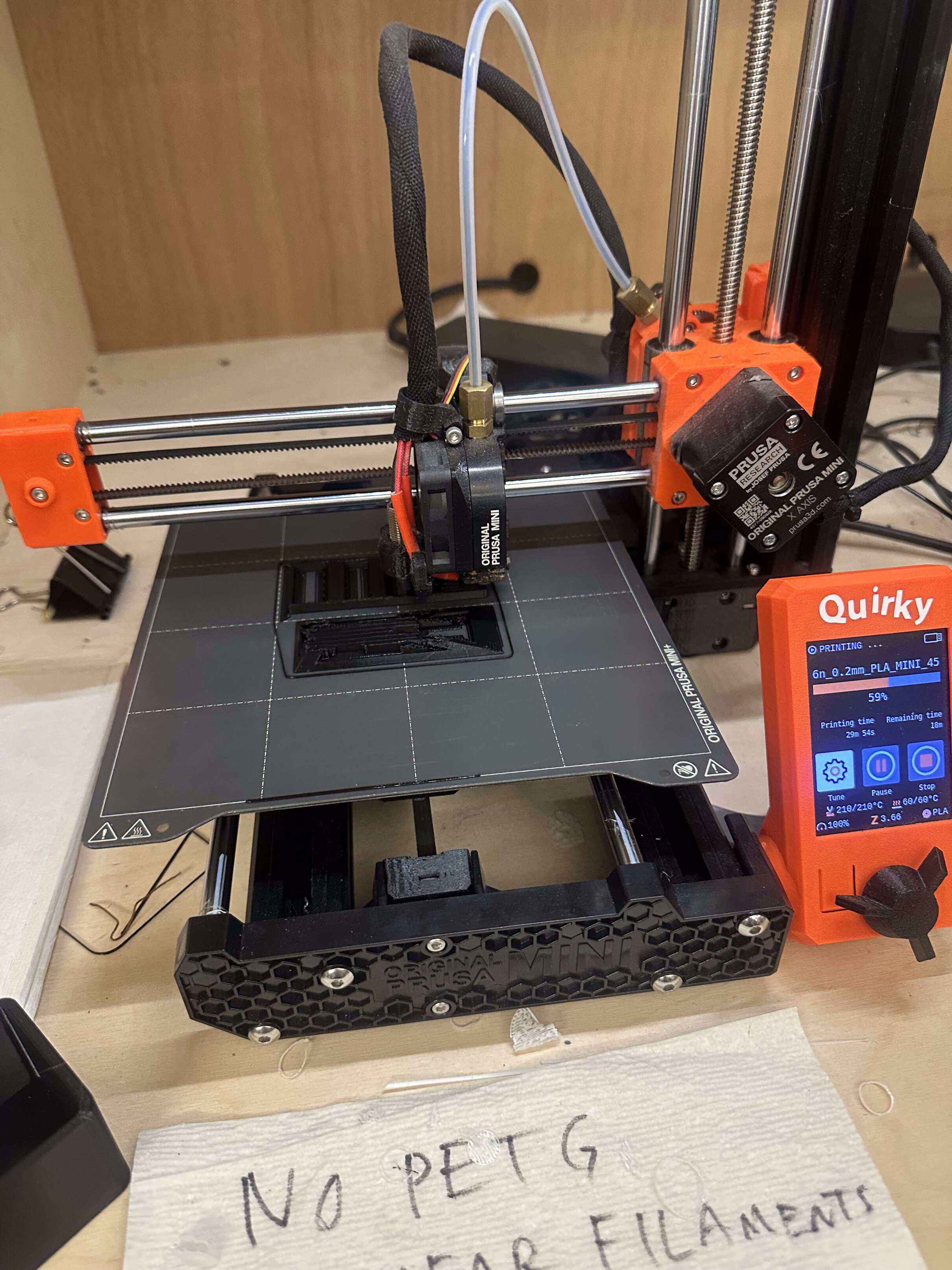
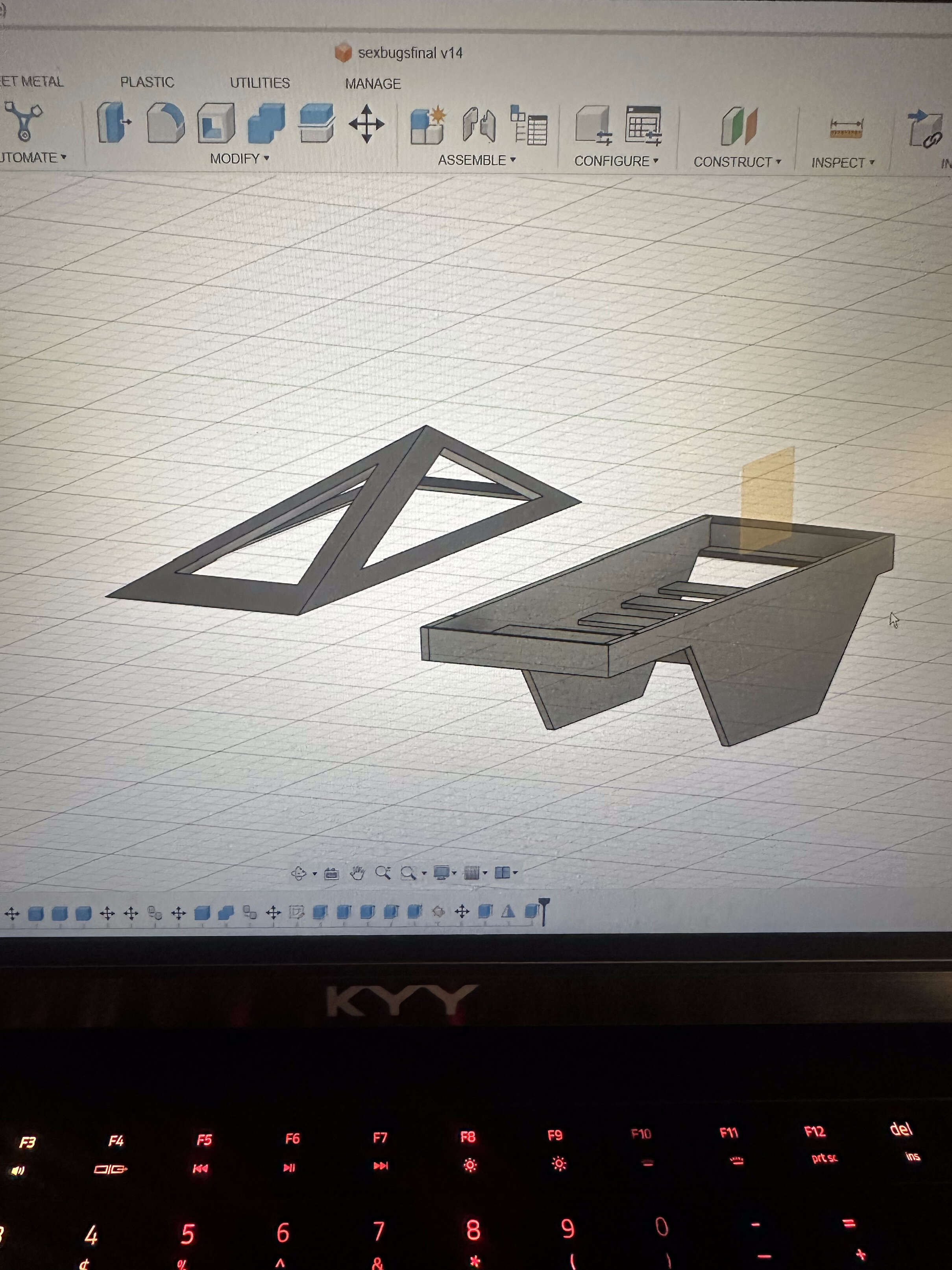
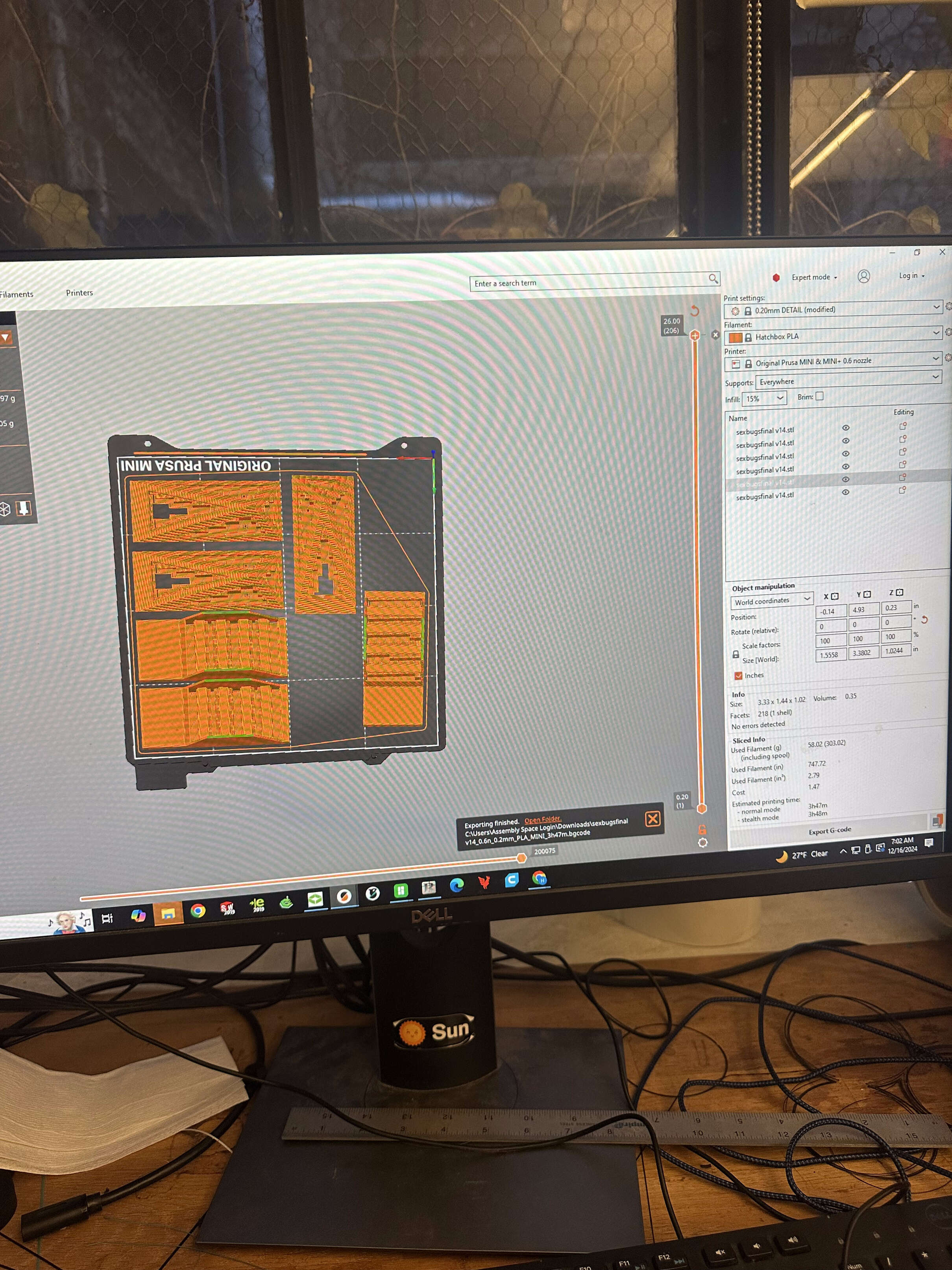
Frame Production
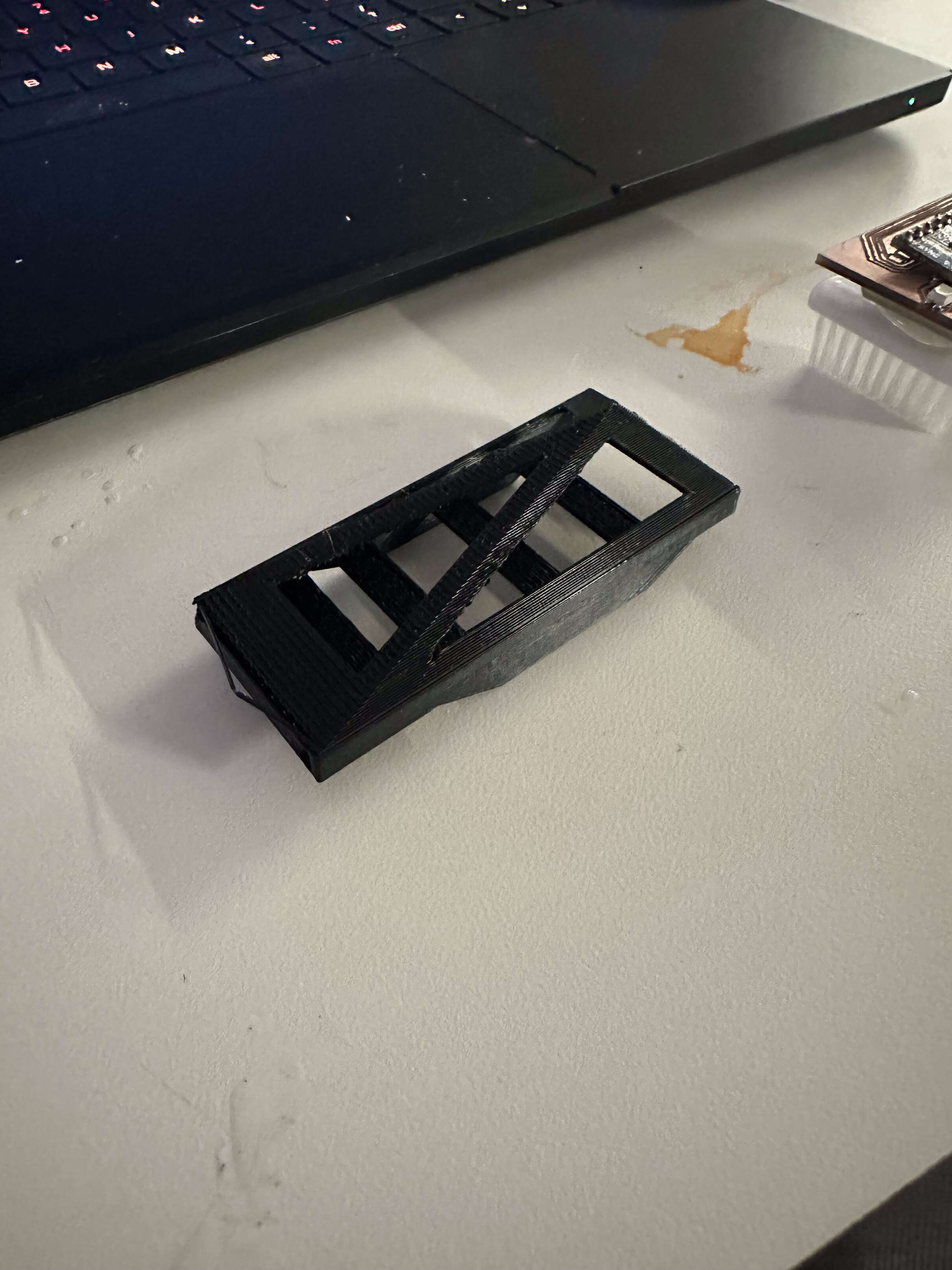
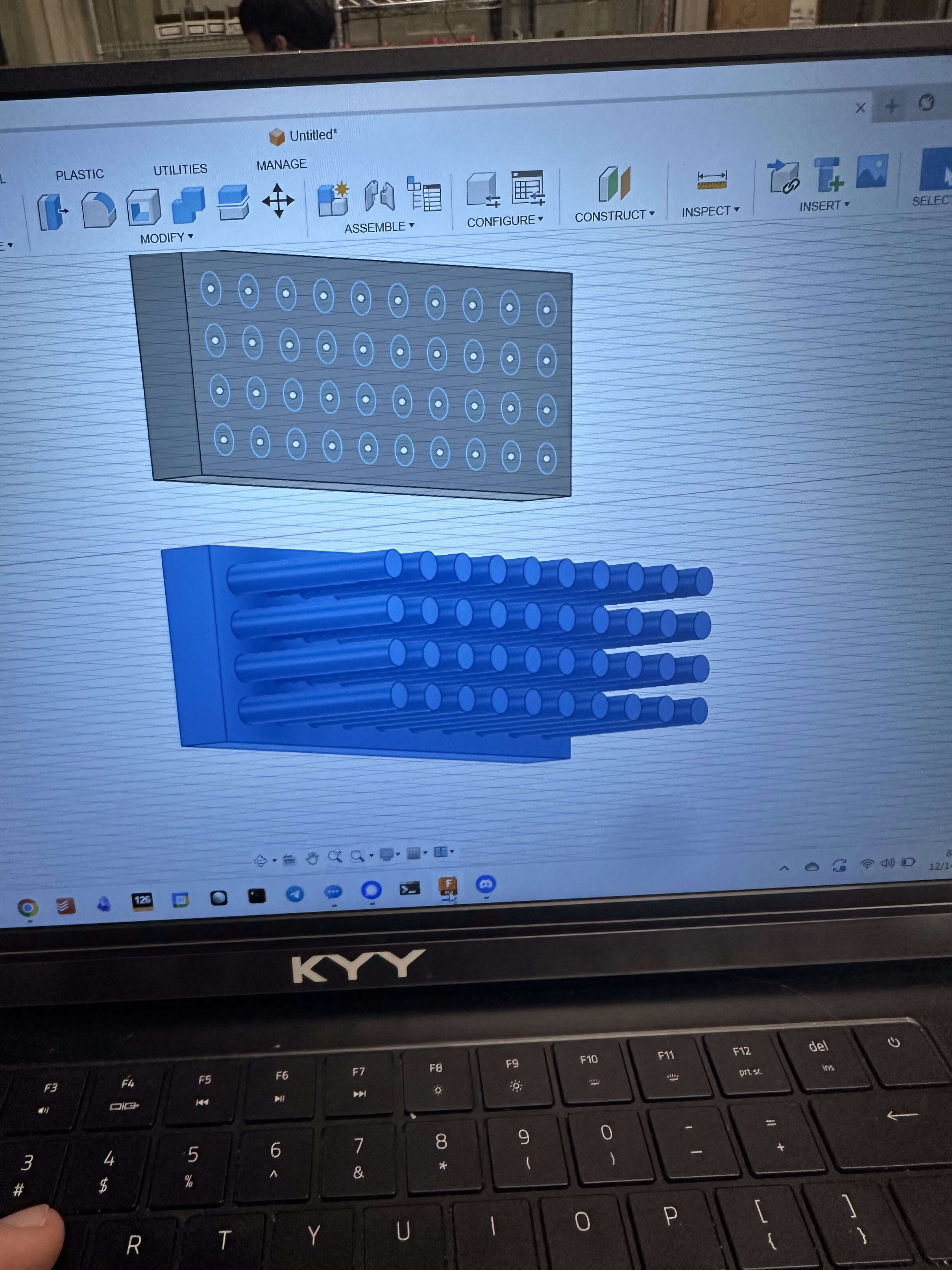
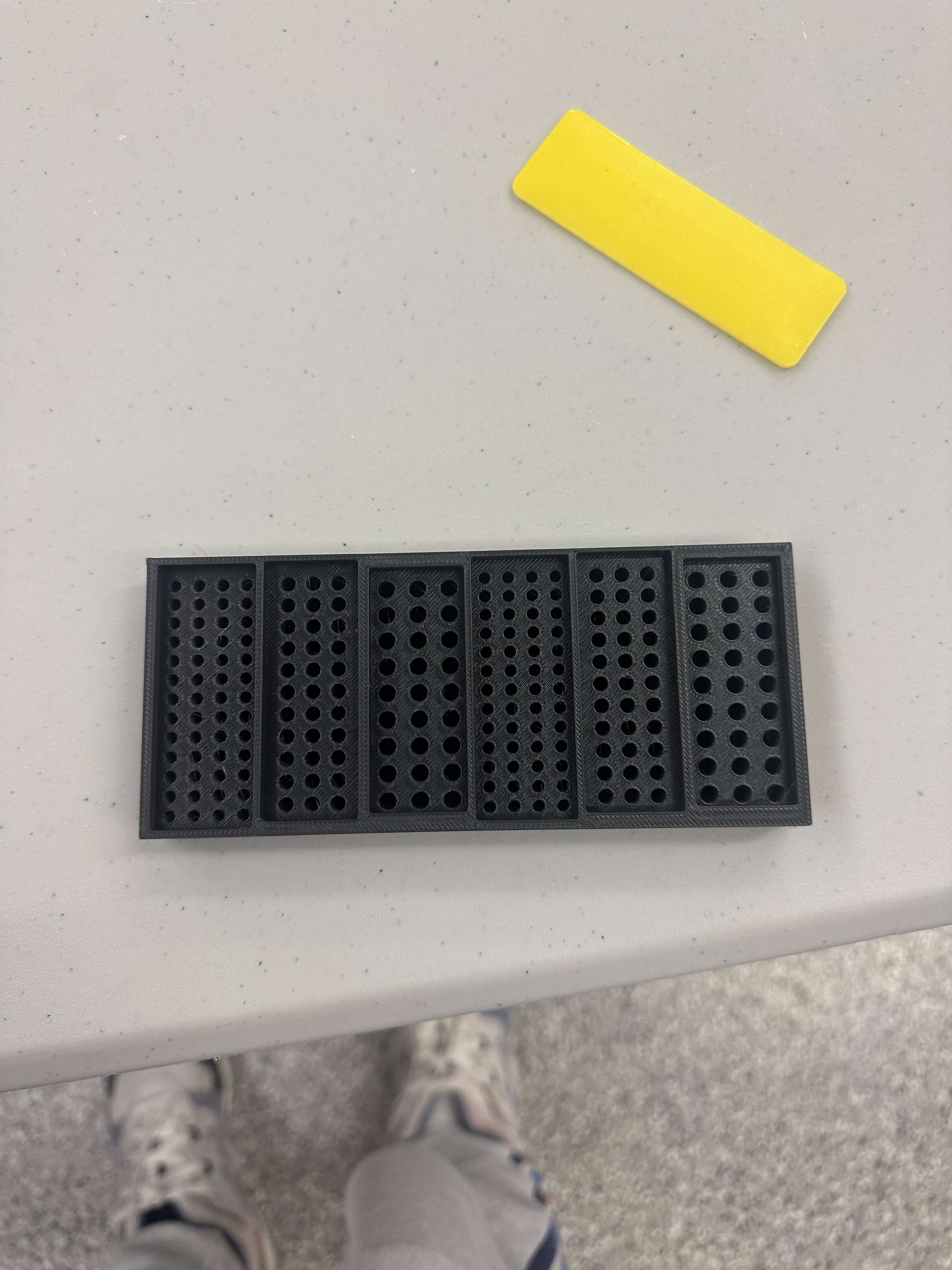
I then create a 3D printed frame for each of the sexbugs. I wanted something that could easily clip on and off so the electronics could be easily accessed for flashing purposes, and so that colors could be mixed and matched between bugs.I make a design mimicking the hexbug aesthetic. I actually didn't chatgpt or any outside sources of inspiration!


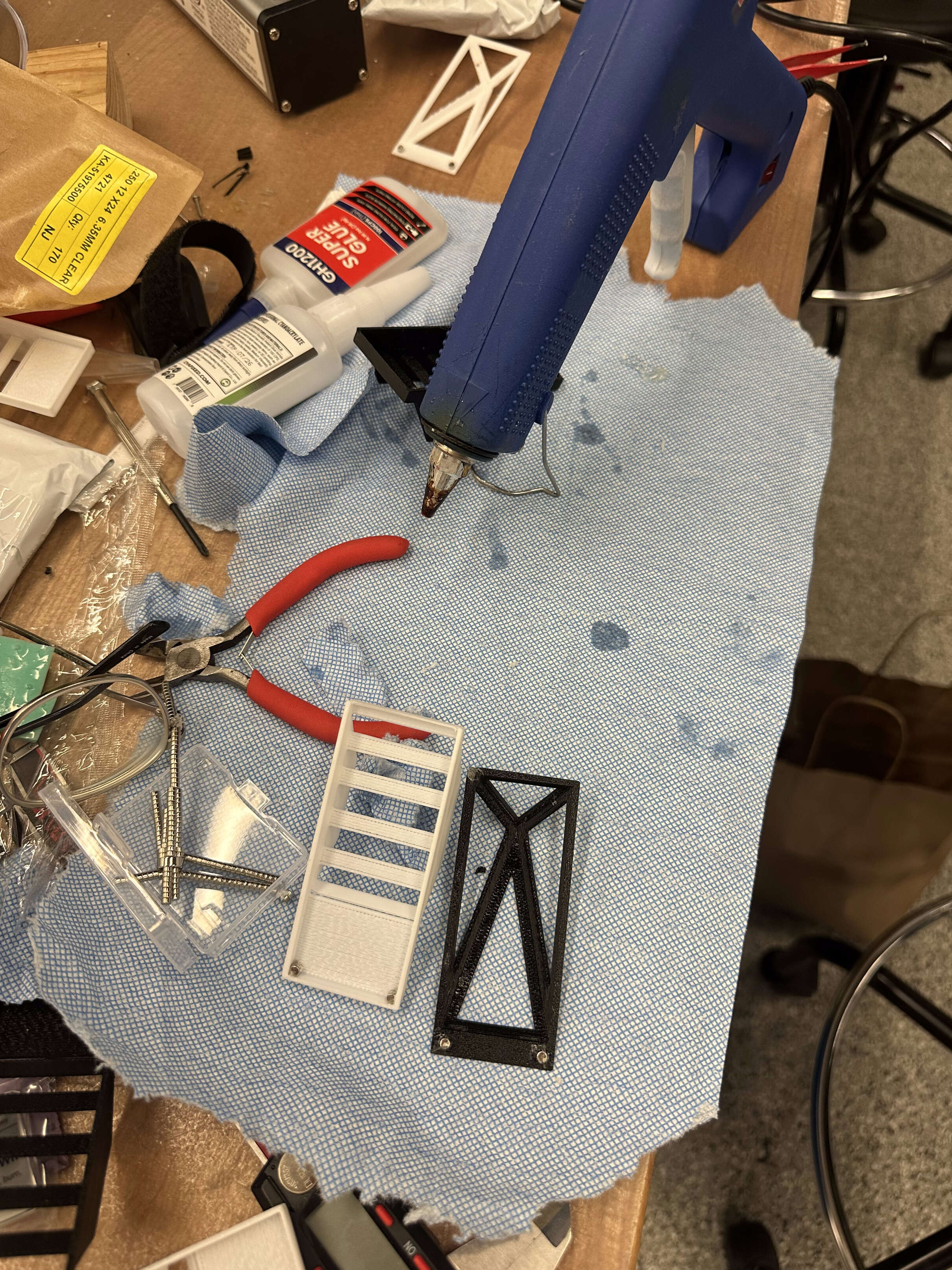
Assembly
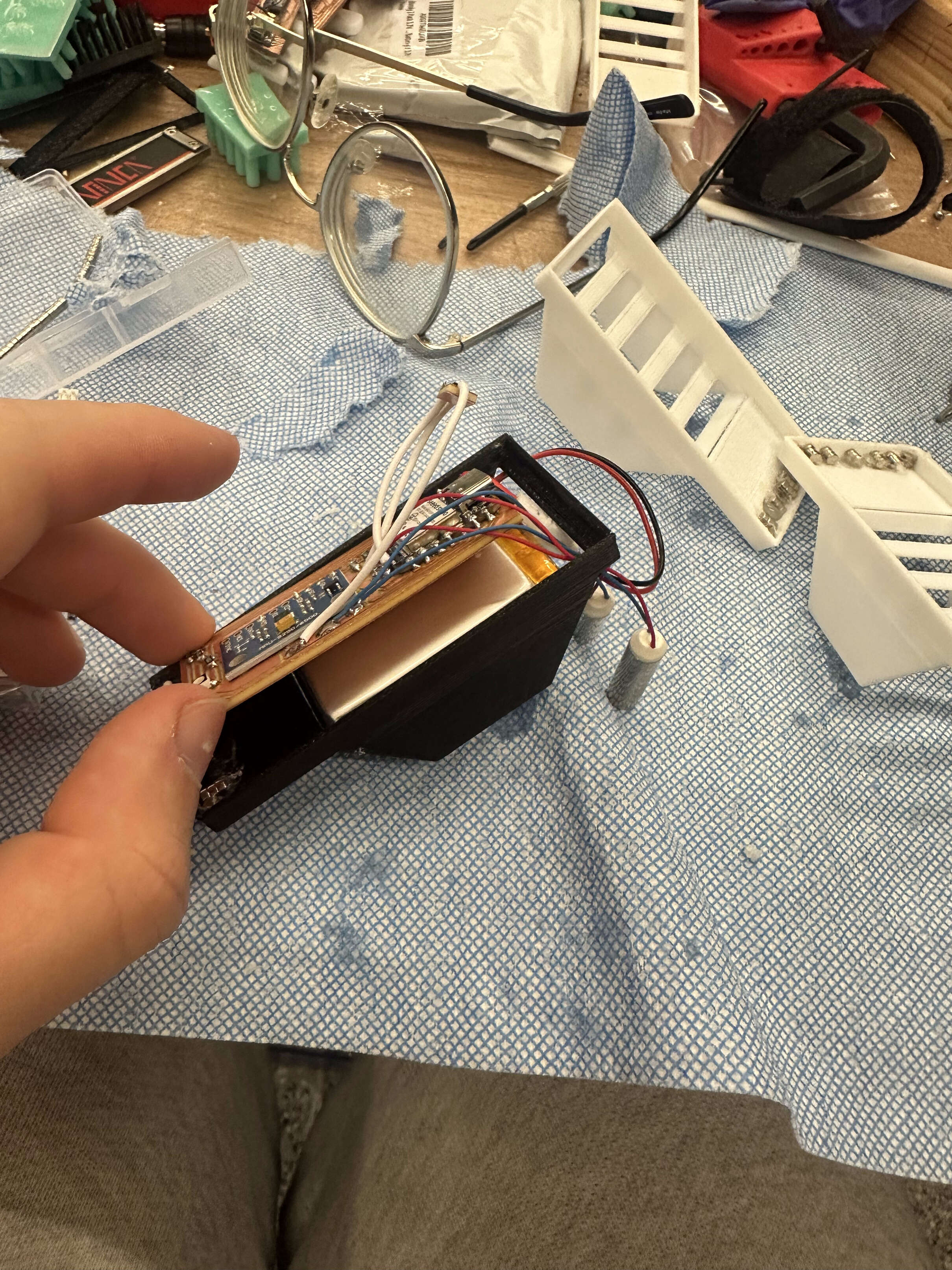
This section details the assemby of the whole system. Gluing magnets, wires, and inserting the parts.Here we glue the magnets down so that the lid can snap on and so that the bugs can communicate.
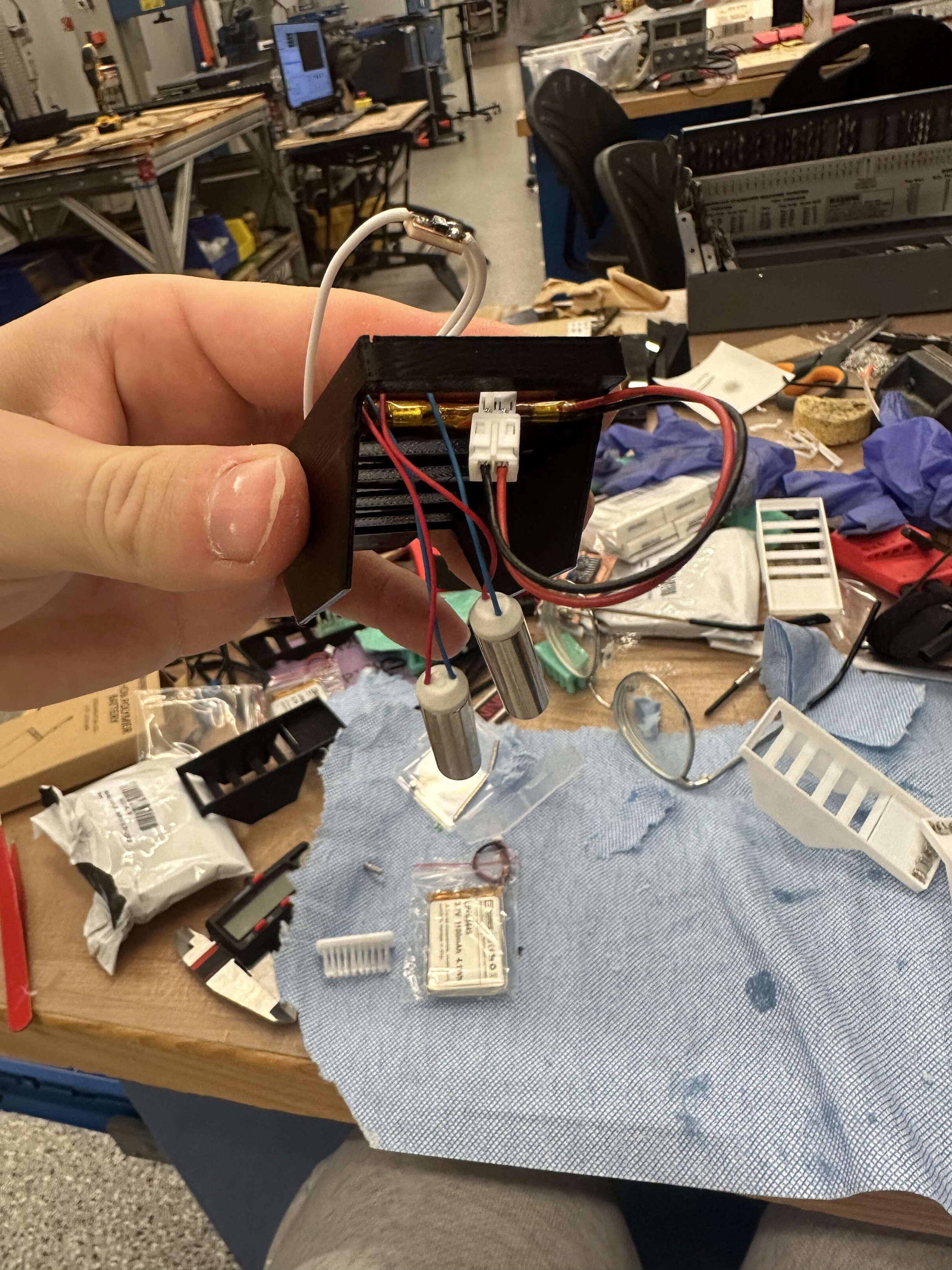
 I glue down the toothbrush heads and the motor.
I glue down the toothbrush heads and the motor.
 I glue down the hall effect sensor.
I glue down the hall effect sensor.
 The magnet lid snaps on. Some photos of the full assembly.
The magnet lid snaps on. Some photos of the full assembly.
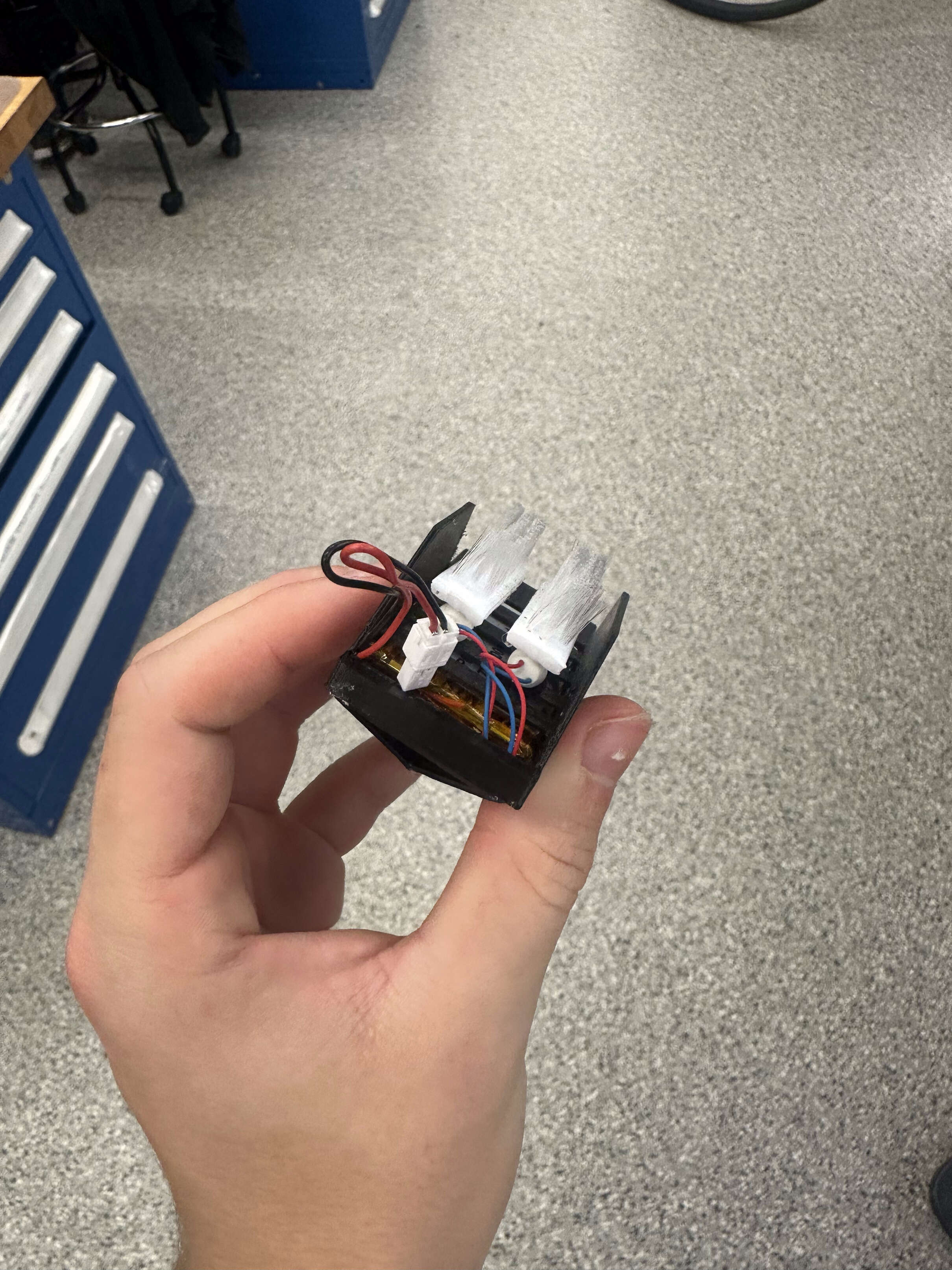


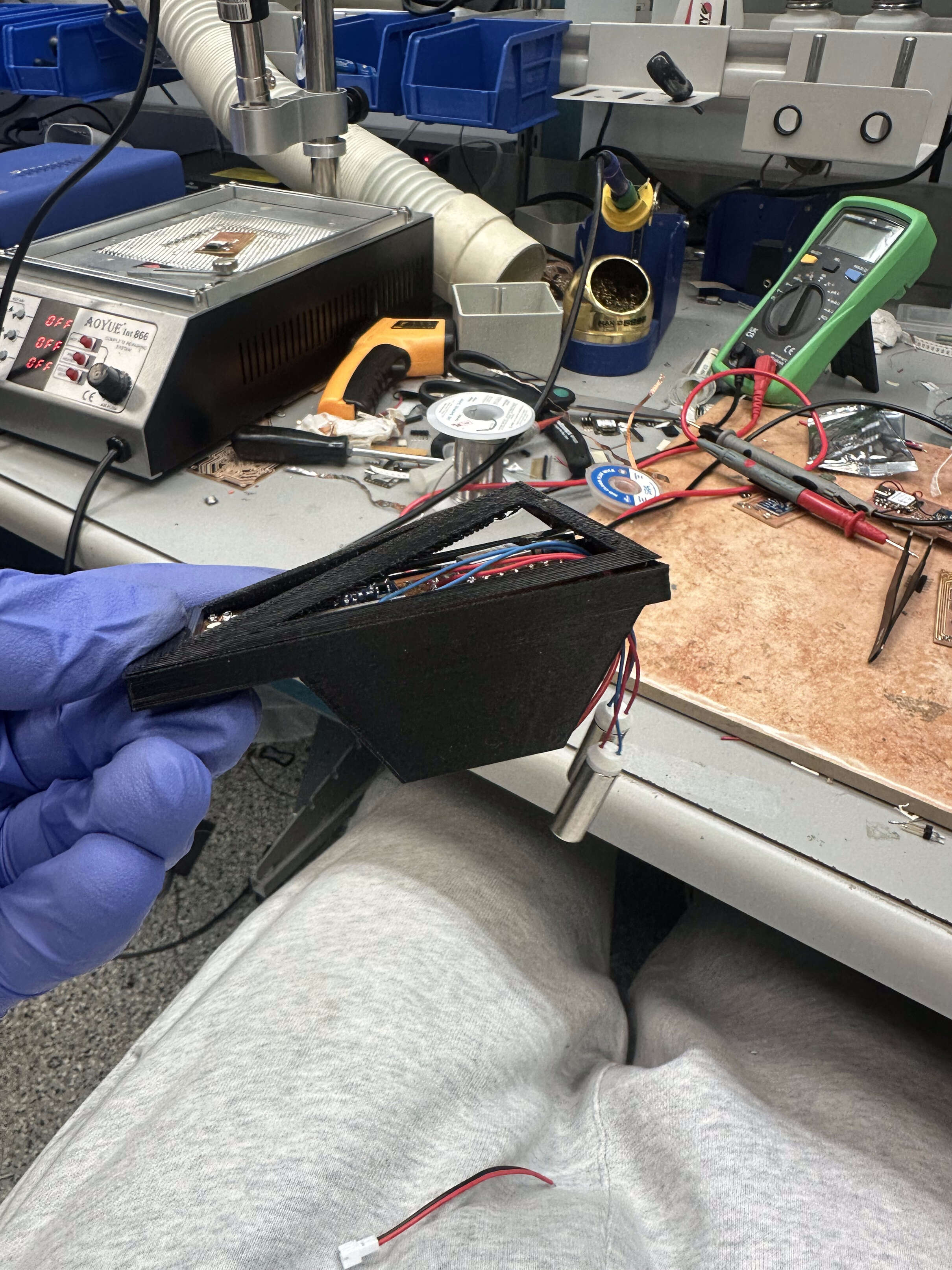
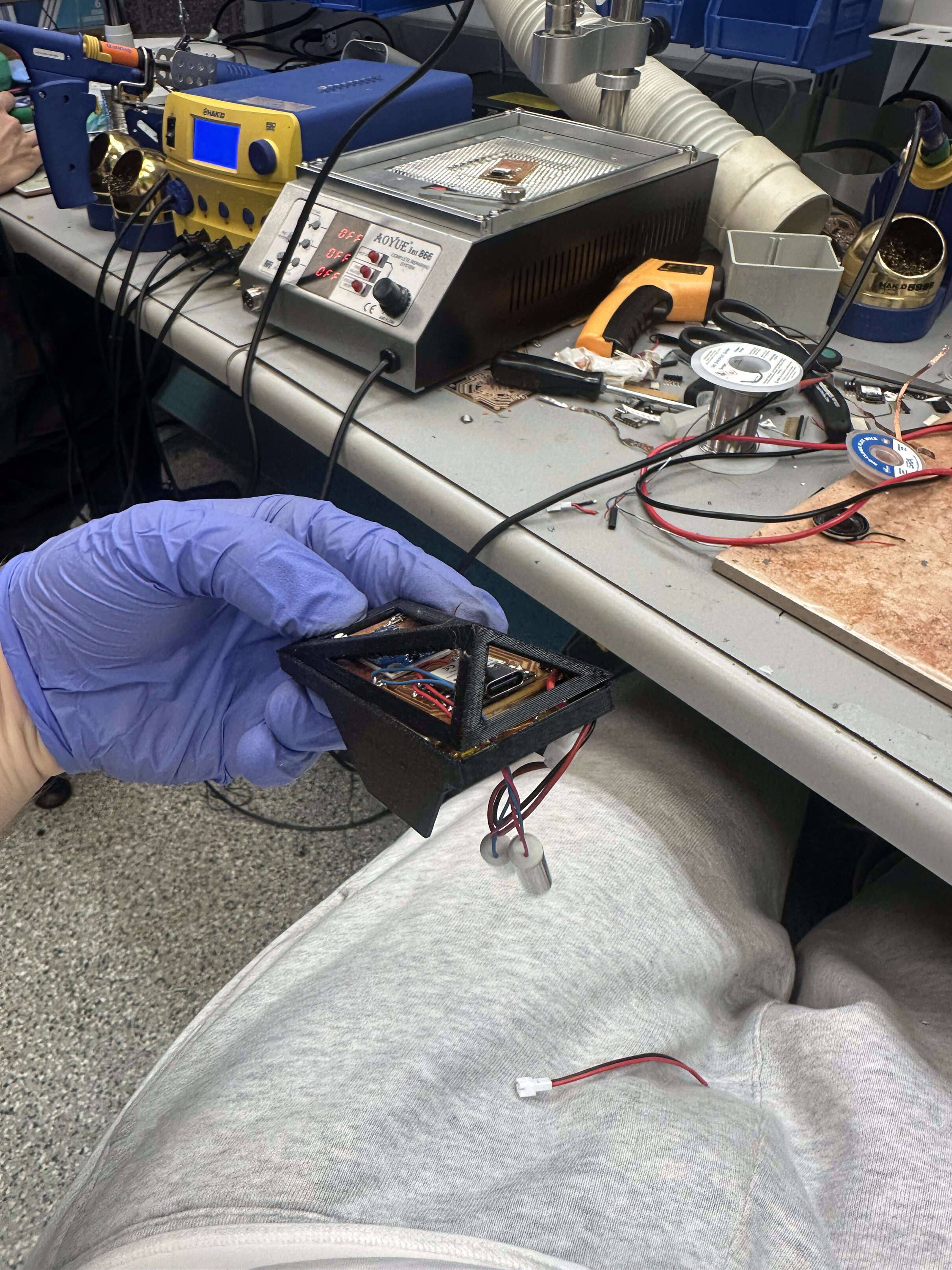
 More photos
More photos


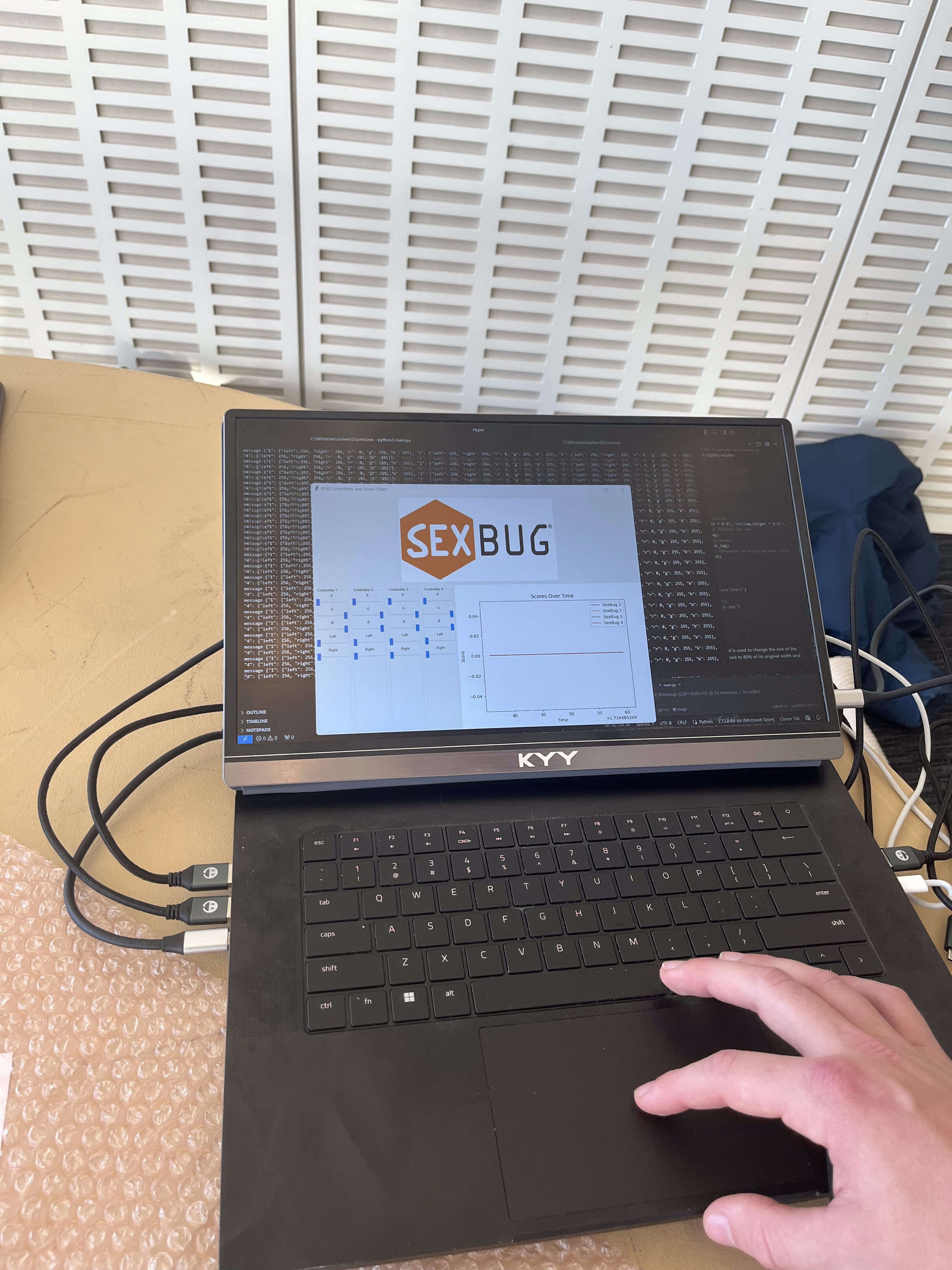
Interface Creation
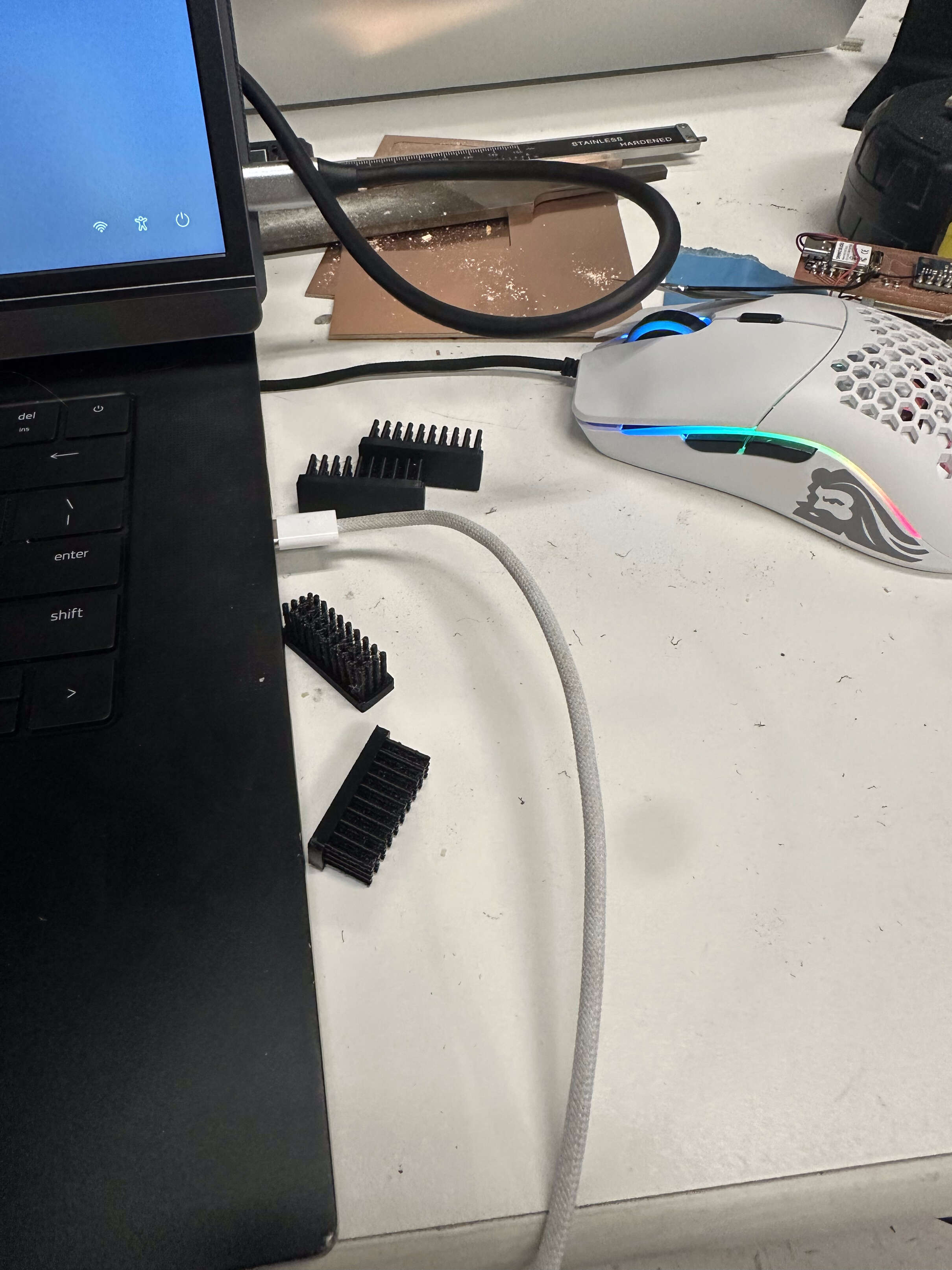
I create a web server on my laptop that communicates with all the sexbugs via websockets over local wifi.I first started by getting the reported data from the bug into my computer.
Presentation
