As a child I loved HexBugs, I decided to recreate a version of them that could communicate with each other. These hexbugs will stop when they are oriented in the same direction and light up. The original idea was to have three bugs triangulate each other by figuring out their distance via SSRI to meet in the middle.
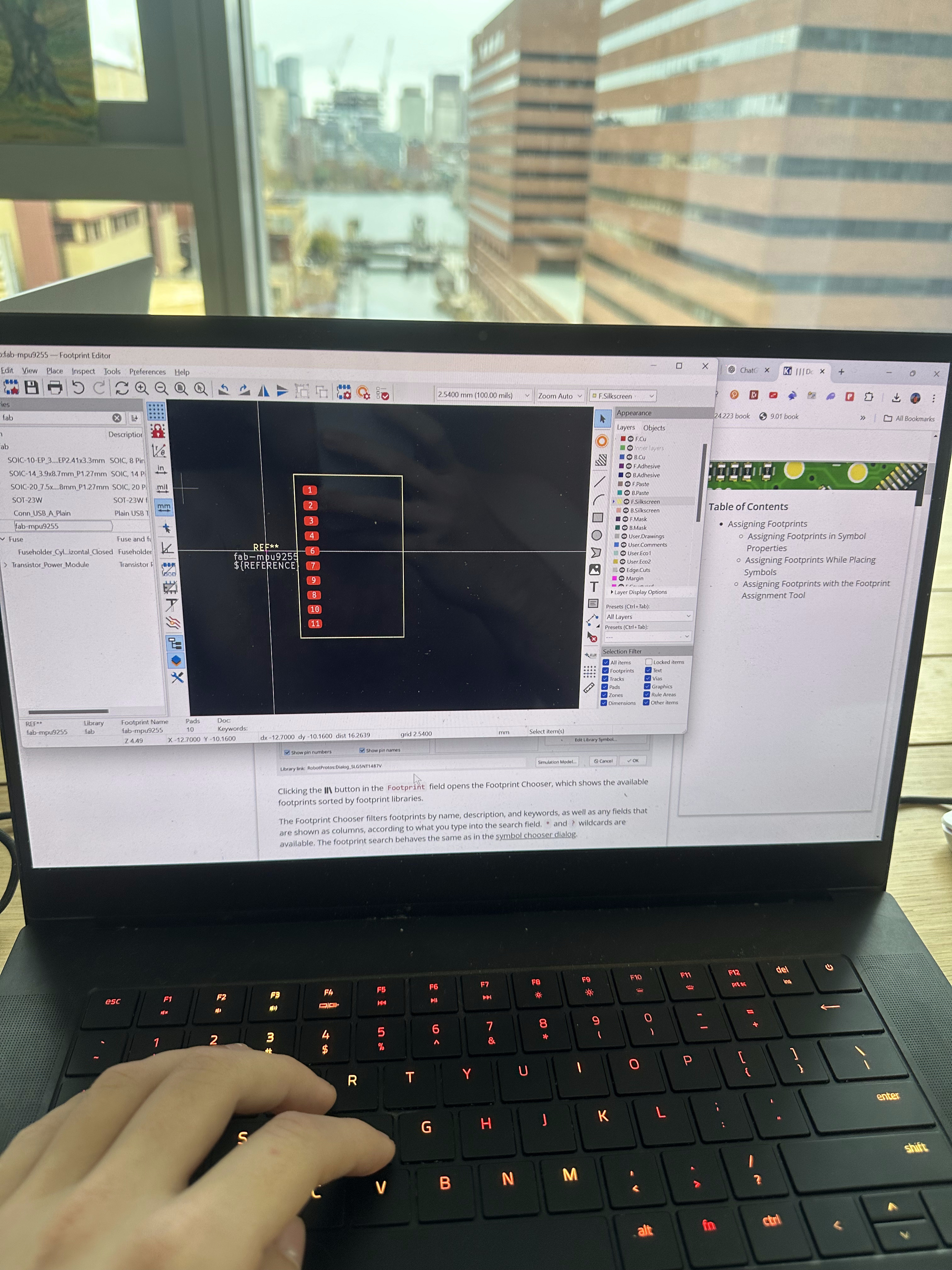
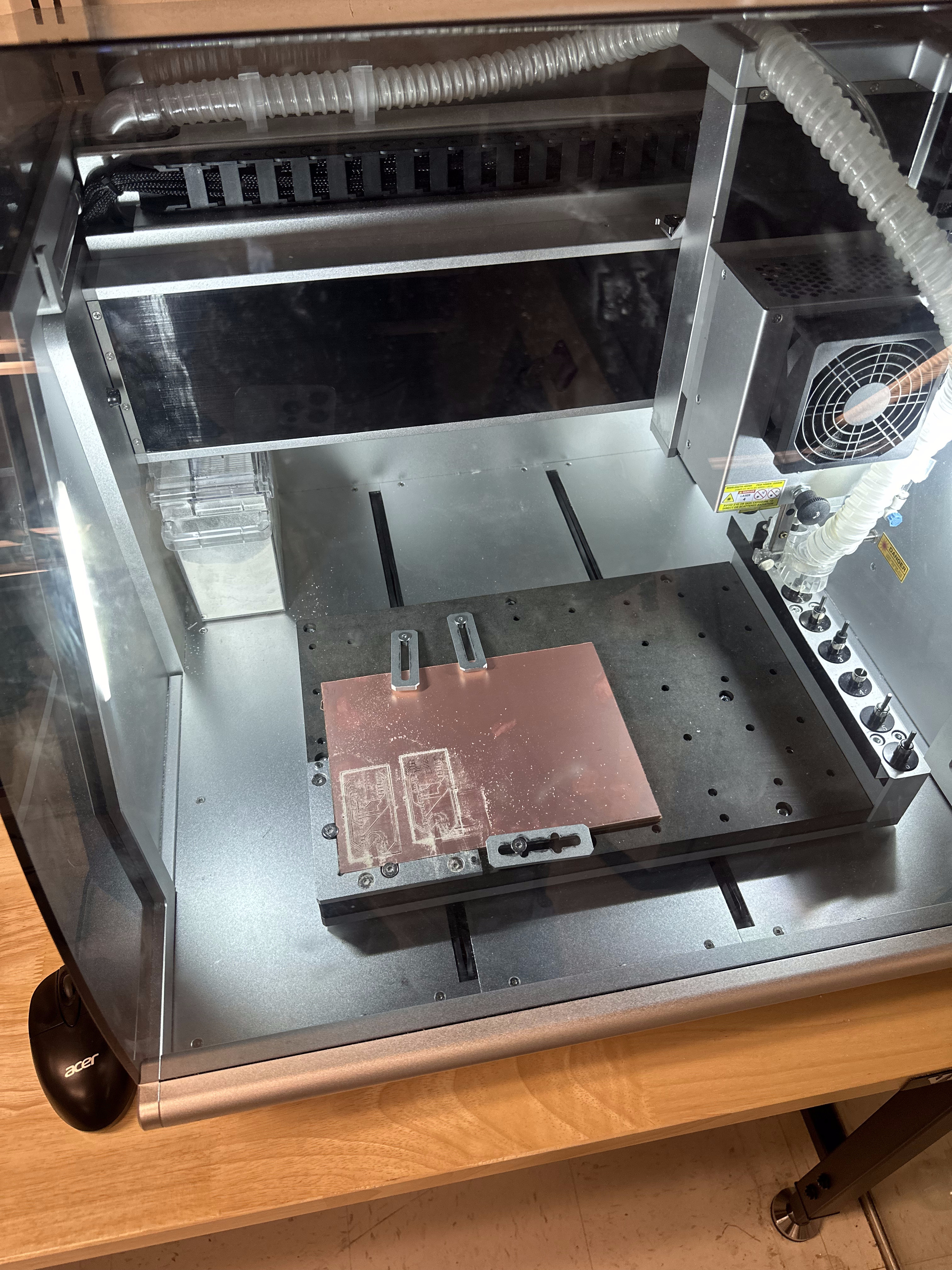
I start by designing the PCB and milling on the Carvera. I had to do ths on Saturday before heading home for Spring Break so I worked out of CBA this time.
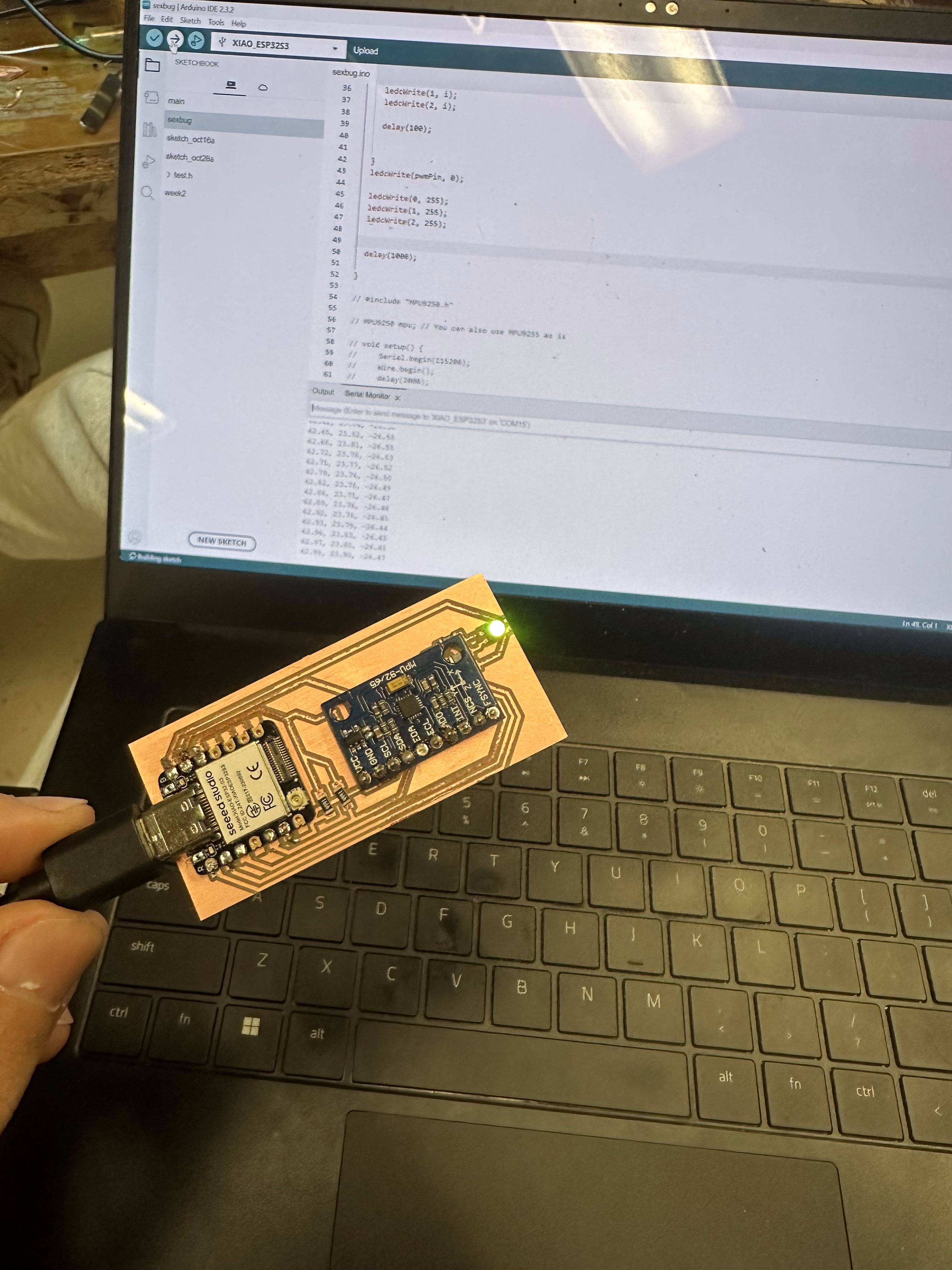
After soldering, I hooked up it up to Arduino IDE, figured out how to get the MPU9250 to work and ensure that the sensor was working before making the rest of the boards.
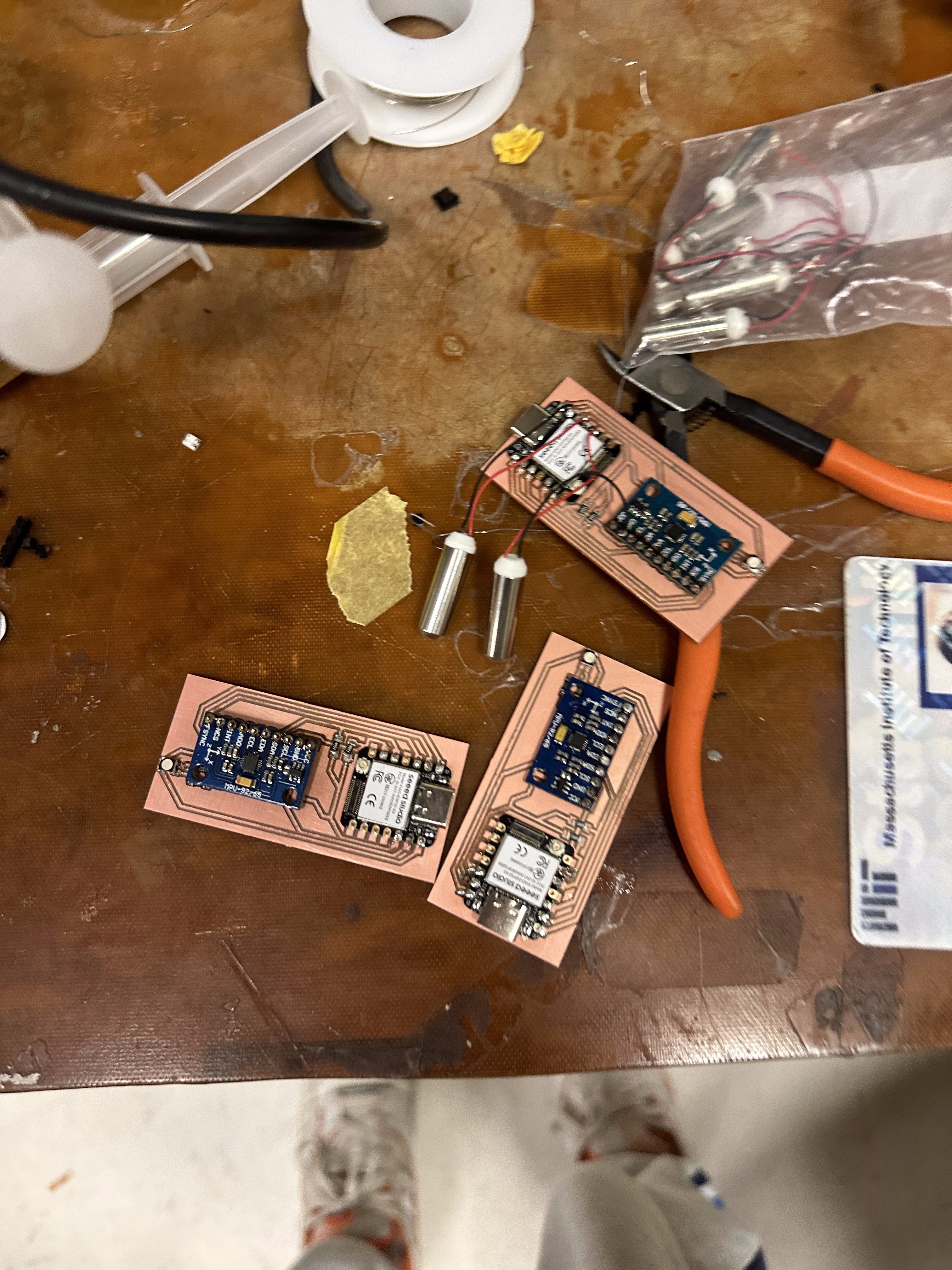
I then solder on the vibrating motors and make sure that those work.
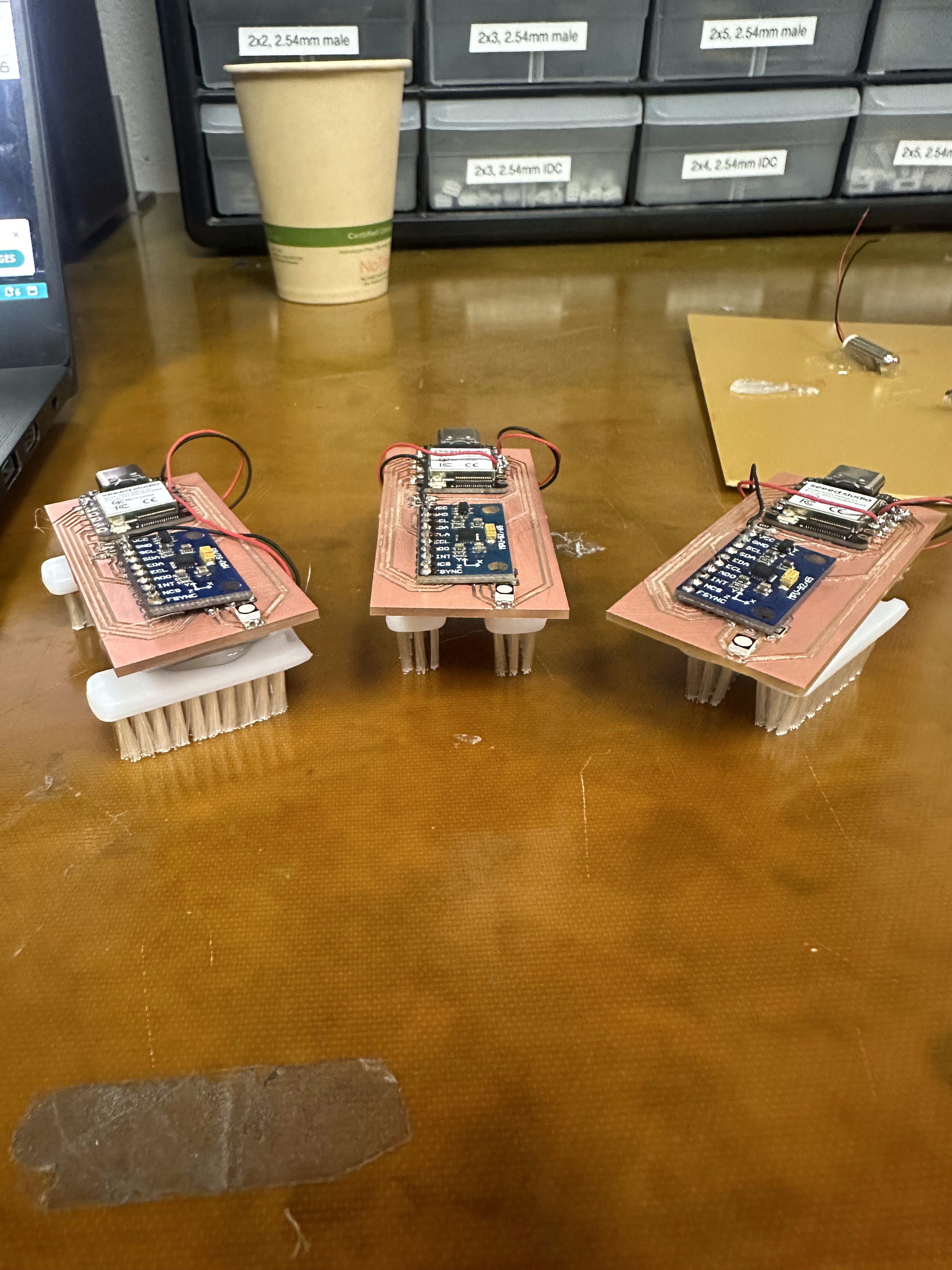
I bought some toothbrush heads to serve as legs. I cut off the handle, glued the toothbrush heads to the vibraiting motors, and the motors directly to the pcb. They can now move!
Then, I found some online tutorials to setup the BLE server/client architecture. We can see message transmission between the Sexbug and my phone. I then get it to transmit the orientation data.
I then program them to randomly move around, until their orientation aligns together, in which case they stop. They both share their location with the other Sexbug dozens of times per second via BLE.