Introduction: My personal passion for wingfoiling and water sports led to this project. Here is an image of me wingfoiling:
Francisco enjoying wingfoiling - the ultimate connection between engineering and the water.
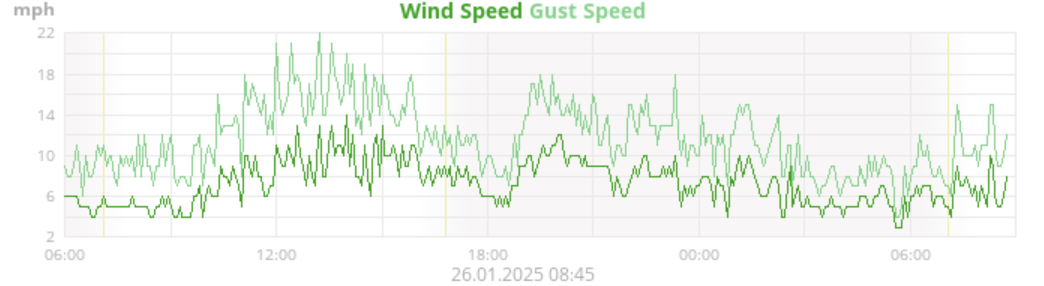
The Problem: Hydrofoil sports require consistent wind speeds of at least 10-15 knots for an enjoyable experience. Unfortunately, many days fall below this threshold, as demonstrated by the MIT Sailing Pavilion's wind data:
Example of insufficient wind days for hydrofoiling.
Imagine being able to hydrofoil whenever you want, regardless of wind conditions. This motivation inspired the creation of a towing vehicle for water sports.
Solution
Development: Several designs were analyzed, including drones and direct foil-mounted motors, each with its pros and cons. Ultimately, a floating towing vehicle was chosen for safety and functionality.
Concept from an Amazon patent for tow control.Electric foil designs - functional but less fun.Tow Jet concept - innovative but potentially hazardous.
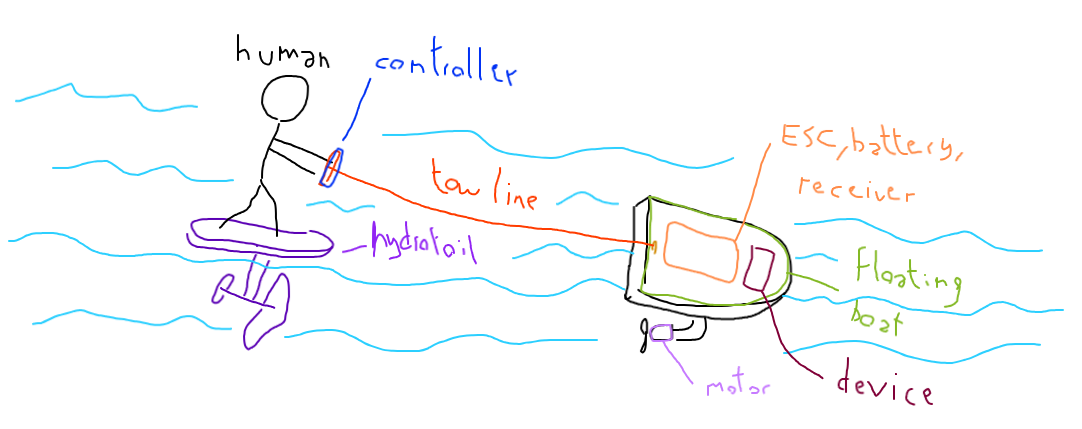
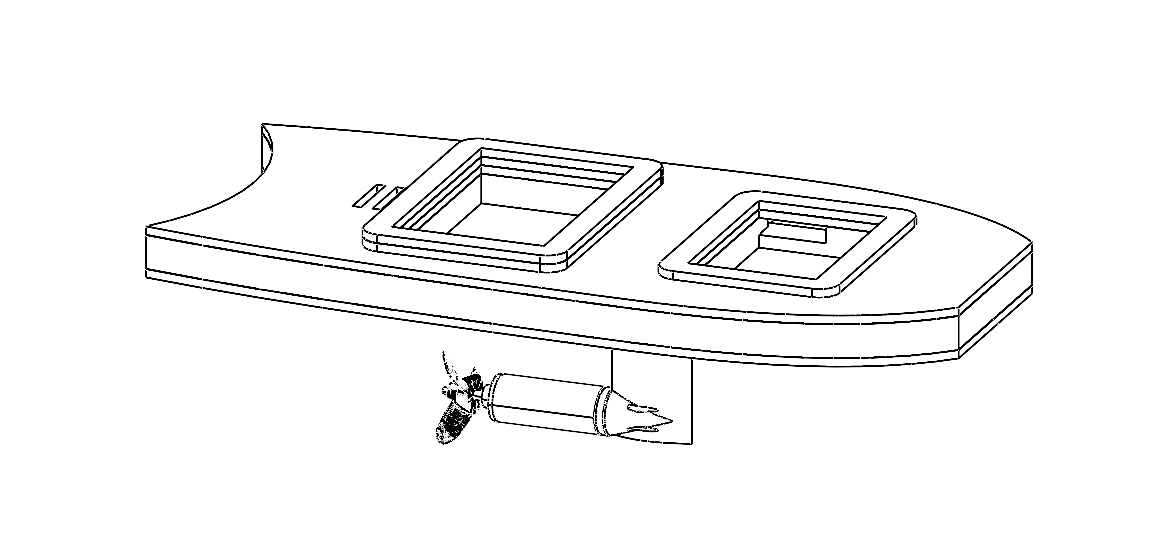
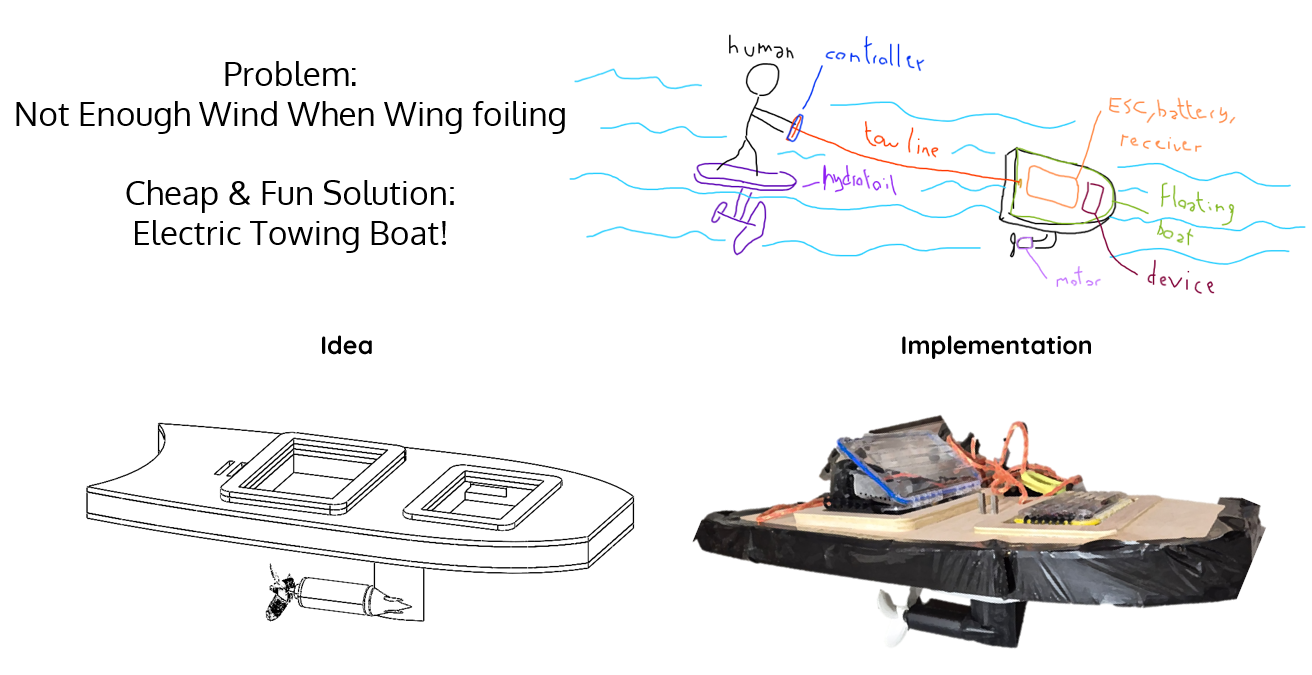
Electric Tow Boogie: The concept involves designing a vehicle that makes hydrofoiling accessible and fun. Here’s a diagram:
Concept diagram of the Electric Tow Boogie.
Our plan is to make this solution much more affordable than the Tacoma eTow.
Commercial Alternatives: Commercially available equivalents, like the Tacoma eTow, exist but are prohibitively expensive, with a regular price of $14,950.00. This project aims to provide a significantly more affordable and customizable solution.
Plan:
Research motor, battery, and chassis specifications.
Order and assemble components.
Program and test electronics.
Build and refine the vehicle chassis.
Test the vehicle in water!
Assignment:
Plan and sketch a potential final project ✓
Planning
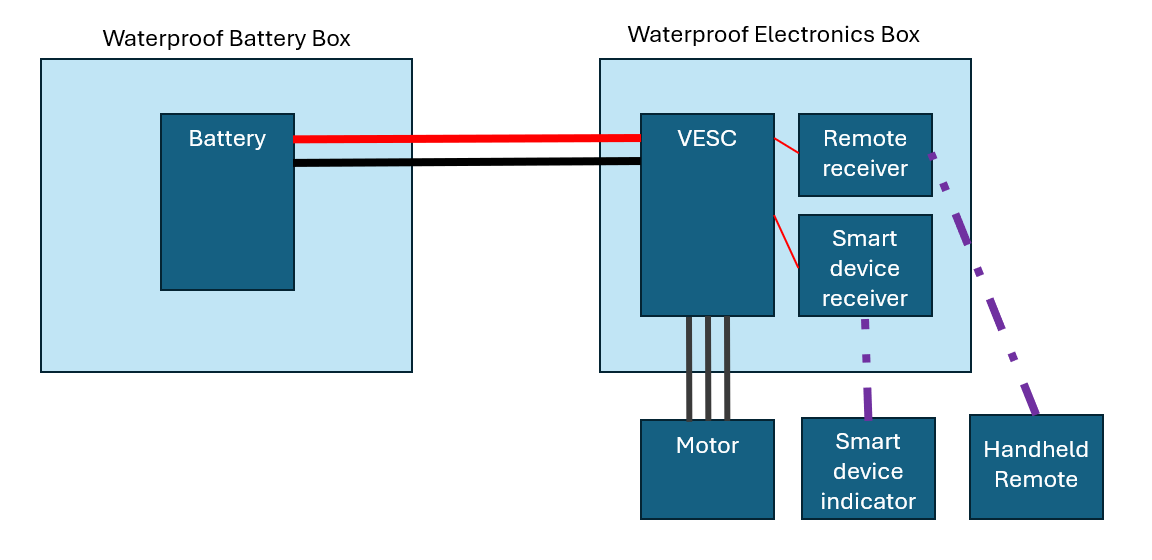
Here is a system diagram of the electronics components of the boat:
Basic System Diagram
After much research in the FOIL ZONE forum, the components selected were as follows:
12S6P Battery consisting of Molicell's P42A high discharge batteries.
Flipsky Fully Waterproof Remote VX3 Controller for Efoil
Flipsky Brushless Motor Sensorless Amphibious Fully Waterproof Motor 65161 120KV 6000W
Erayco 200 Amp Circuit Breaker with Manual Reset Switch High Amperage for Marine RVs
Plano Guide Series 3700 Field Box Waterproof Case
Plano Guide Series 3600 Field Box Waterproof Case
FLIPSKY 75200 FOC 84V High Current Single ESC with Water Cooling Enclosure
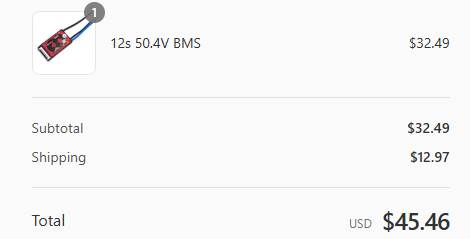
Mboards 12s 50.4V BMS
Done (Executed during September and October):
Select components
Tasks to be completed (Scheduled for November and December):
Order components
Wire up components
Machine Board
Design and build E-device
Test Tow Boat
I met up with TA Marcello to share my progress and brainstorm the final weeks for implementation.
Midterm Assignment:
Post a system diagram for your project on your final project site ✓
List the tasks to be completed ✓
Make a schedule for doing them ✓
Meet with your local and global instructors to review your plans and weekly assignments ✓
parts ordered
When ordering the parts the following considerations were made:
-Two boxes for a distributed CoM centered and slightly behind the motor to compensate for the rope effect which pulls the nose down.
-Two/three layers of waterproofing: 1. electrical components are shielded (enclosures, wrapped, cables shielded etc.) 2. Water proof enclosures 3. A wrapper/lid/fiberglass will enclose the waterproof boxes.
-Battery capacity calculations for around 30 minutes of cruising.
-Motor power calculations for enough thrust to start foiling even against the wind
-Controller always stays on the user in case the user lets go of the handle.
Ordering and cost: Here are the part orders, in a 2×5 grid:
The total cost is thus: $45.46 + $327.93 + $26.55 + $60.61 + $9.55 + $24.43 + $95.61 + $367.61 + $138.11
+ 100 (for wood, foam core, fiberglass, epoxy, 3D printer plastic and other components)
= $1,195.86
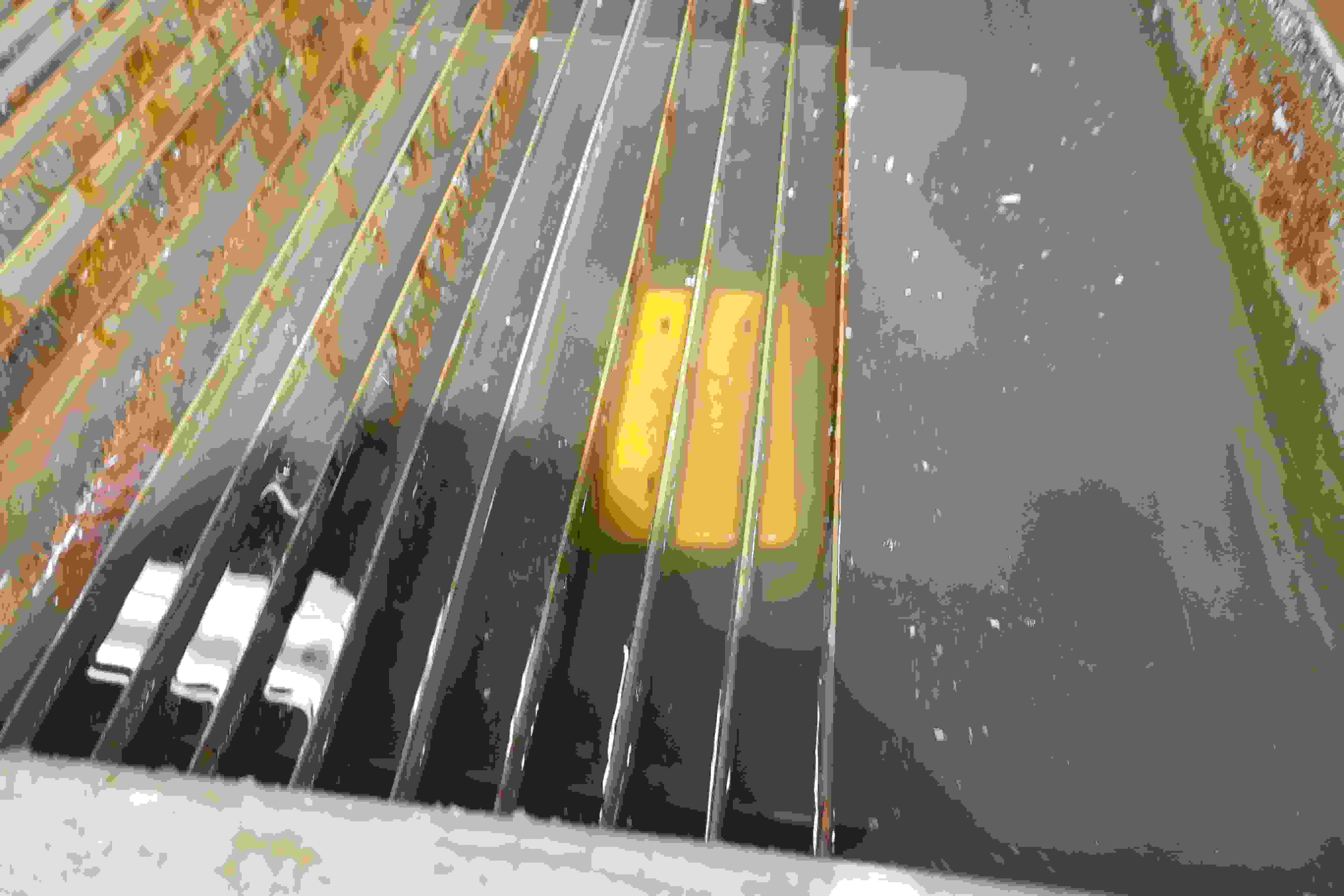
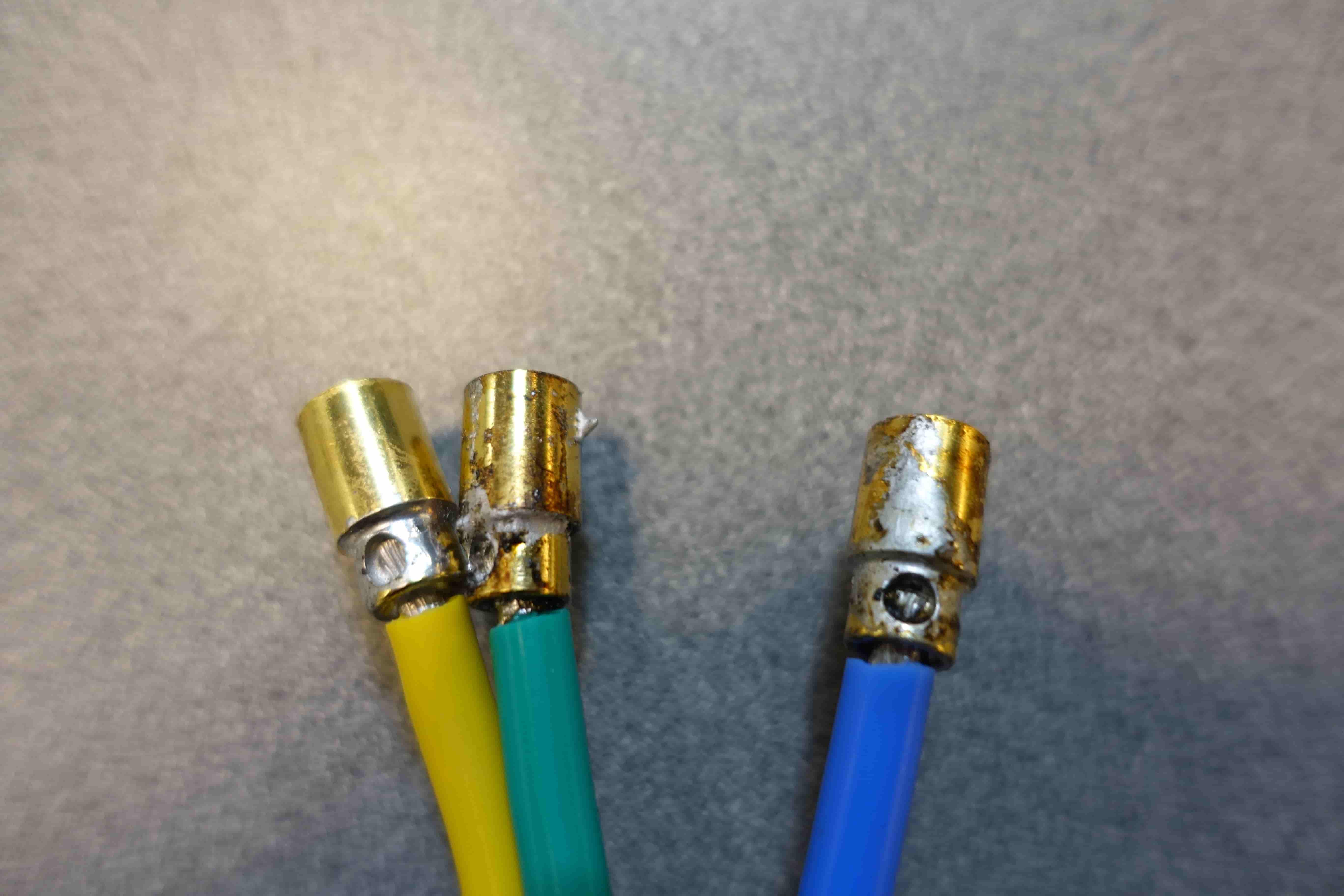
Waterproof preparation
The two boxes were machined, and cable glands were used to ensure a snug fit with cables. The Box with cables was submerged in the waterjet tank for 1h, and showed no leaks.
Box needs holes for cables to go throughHoles being drilledThree cables that each go to a different phase of the motortesting watertight seil in the waterjet
Boogie board machining
The main board was machined with spaces for the cables and waterproof boxes. Wooden rectangles to make the lid height correct, as well as an attachment point for the tow line was machined. Additionally, the attachment interface between the motor and the boat was 3D printed. Two traversing metal beams are press fit for robustness.
For the design please see week 1, for the manufacturing please see weeks 4 and week 10.
Vision of CAD
3D printed Fuselage attachmentBoat machined on the ShopBot
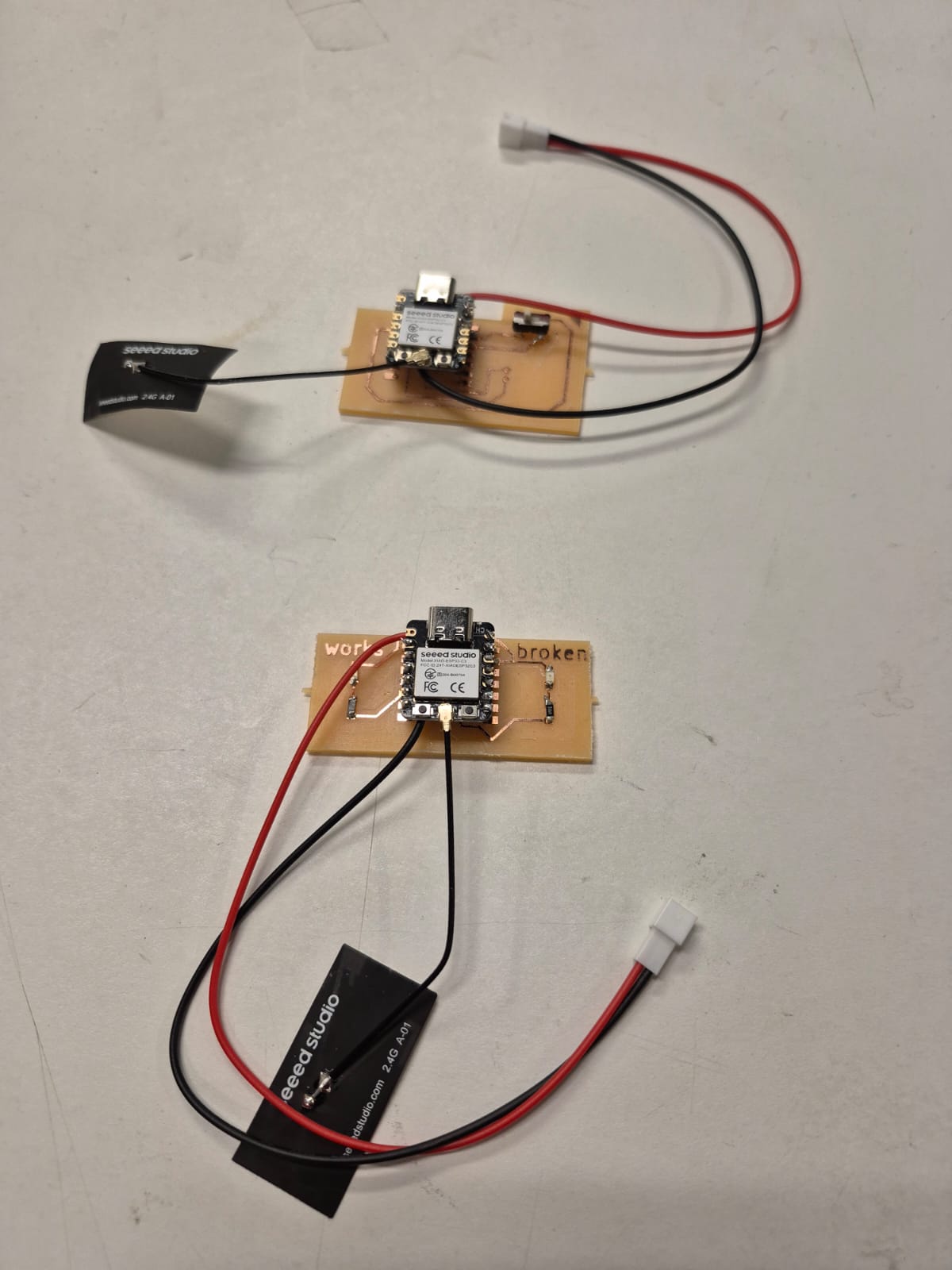
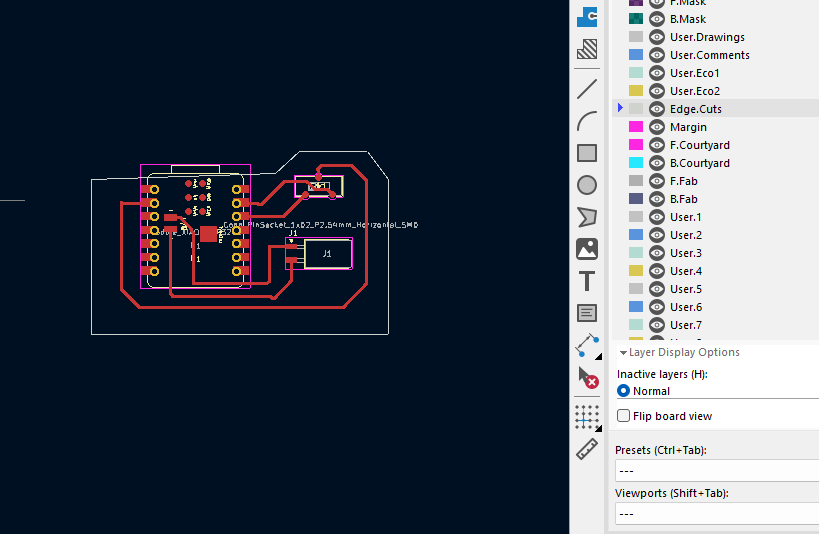
Smart device Indicator
The idea is for a device to communicate between the board and the external world. In particular, the device could communicate when the tow boogie is in use, or when the tow boogie is charged.
For this final project demonstration, I chose the machine box to show when the tow boogie is broken. This way, when I lend out the tow boogie users can press the switch, and I will get an indicator in my office that it must be fixed!
For the design of the circuit view week 5, for the production view week 6, for the integration of the input and output devices view weeks 8 and 9, finally for the code and networking view week 12.
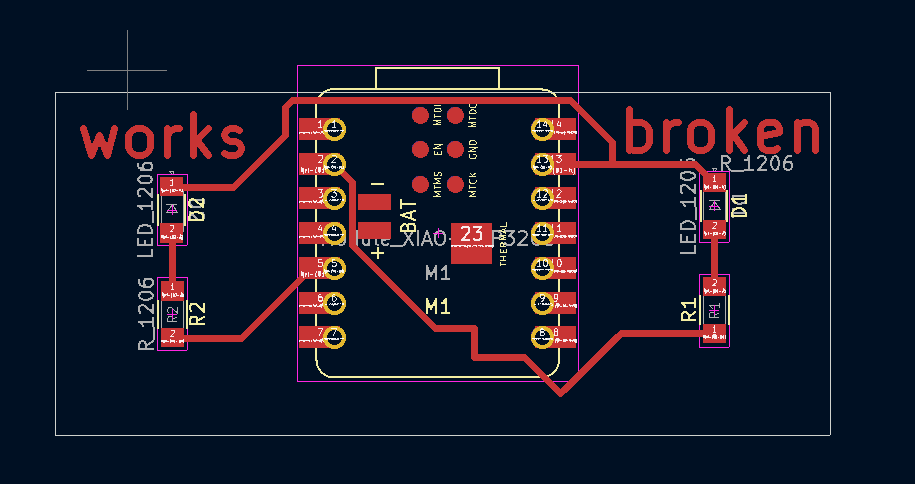
receiver and transmitter
Circuit that displays if the tow boat is brokenCircuit with a switch to indicate if the tow boat works
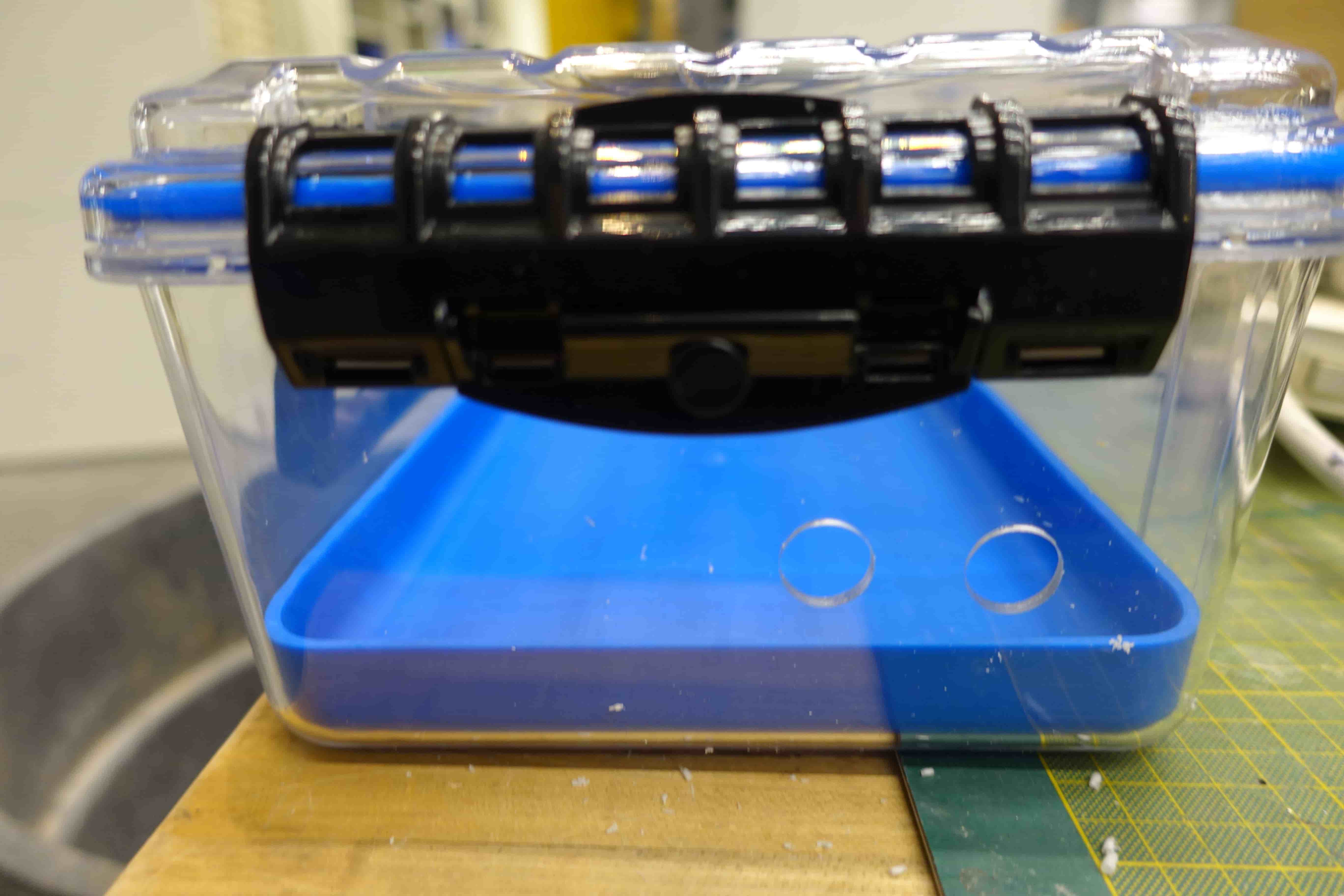
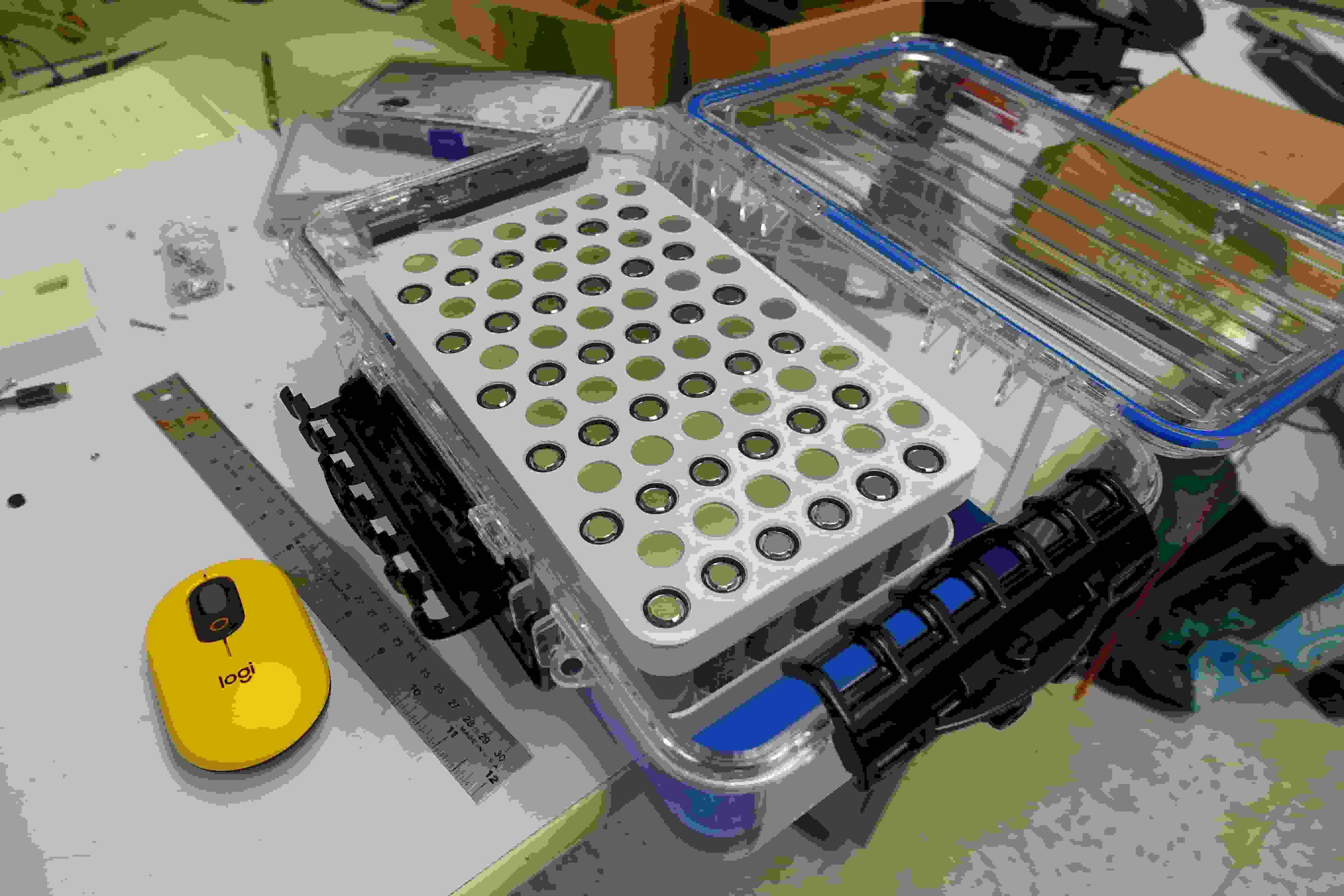
Battery
3D-printed cases were designed and built to hold all batteries in perfect distance. Unfortunately, this battery posed a safety threat as the lab is not fully equipped to handle battery fires (sand buckets necessary, for example). The battery will need to be assembled at a later point in collaboration with MIT's Electric Vehicle Teams. Instead, I am fortunate that Nick was kind enough to share his e-bike battery. While it is not designed to go in the water, this battery is good enough to test out the electronics.
The box goes into this waterproof containerthe battery is held by two 3D printed enclosuresFor quick tests outside the water, an e-bike battery is used instead at the moment
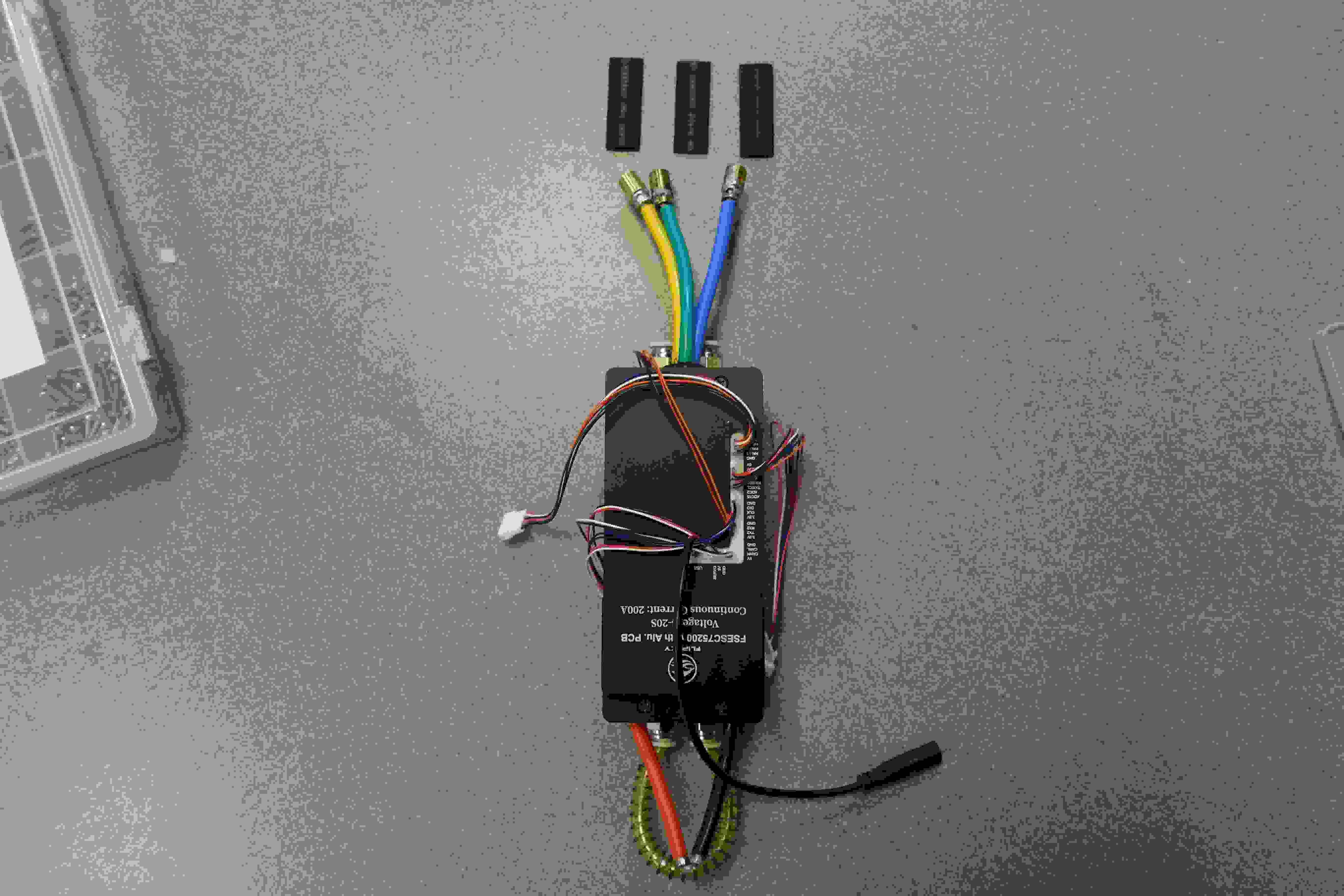
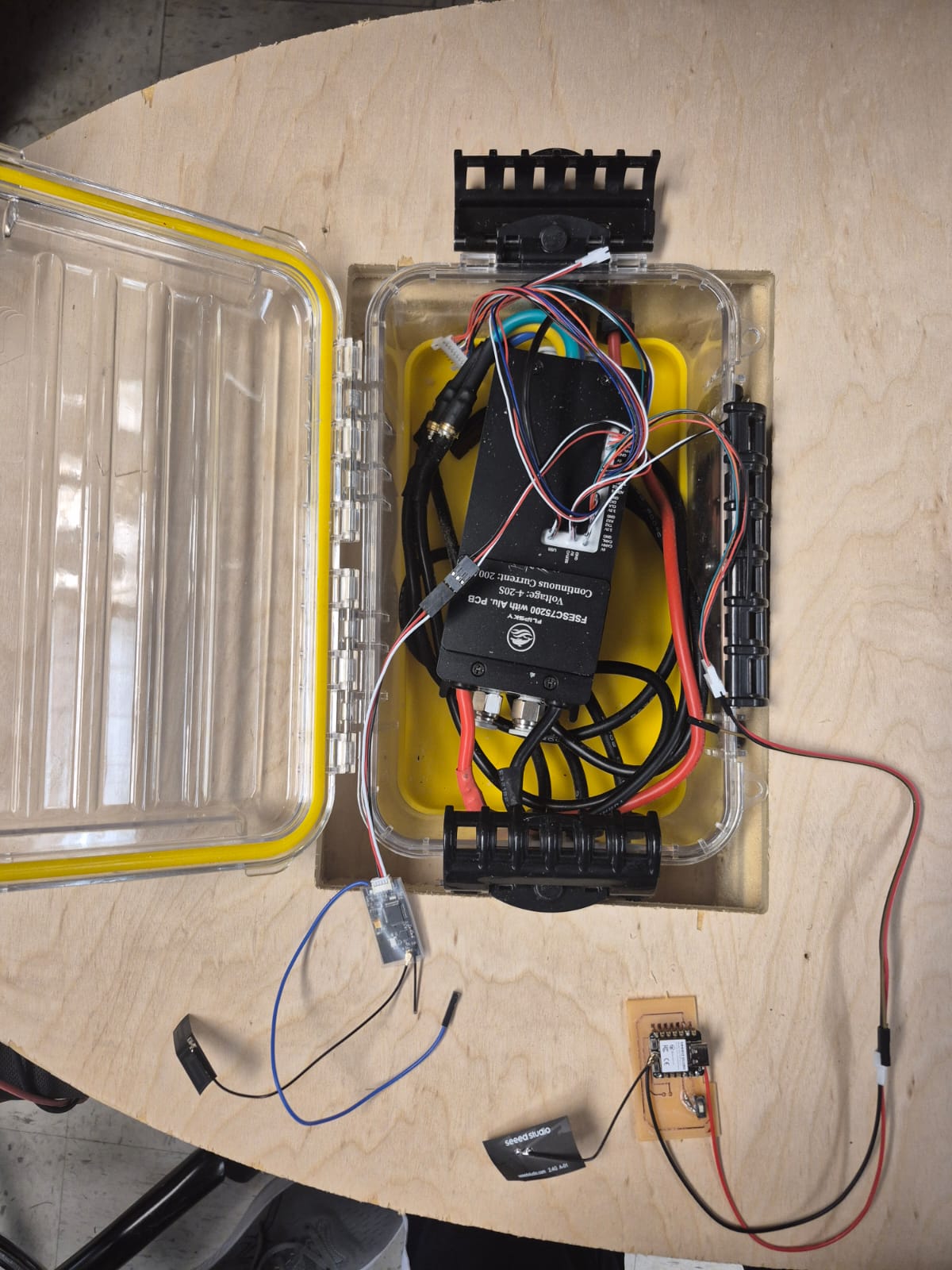
EV Electrical Assembly, Programming and testing
The connectors were soldered, the ESC and motors are wired and connected. Everything fits well!
The VESC which was programmedMotor ends with pins which were soldered All the electronics system
Functionality testing
Final tow boat!
Motor Test 1
Motor Test 2
Indicator Switch Test
Summary slide
Conclusion
Document a final project masterpiece that integrates the range of units covered, answering:
What does it do?
The project provides motorized towing assistance for hydrofoiling in low-wind conditions.
Who's done what beforehand?
Similar commercial products include the Tacoma eTow, but they are costly and less customizable.
What sources did you use?
Technical manuals, hydrofoil community discussions (foil.zone), and academic research papers on water propulsion.
What did you design?
The wood/foam floating boogie, PCBs, fuselage fixture, and electronic systems were fully designed.
What materials and components were used?
waterproof brushless motor, lithium-ion batteries, wood, foam... see BoM above
Where did they come from?
Sourced from online suppliers (motor, ESC, batteries...), local hardware stores (Screws, wood, foam core...), and surplus electronics from the CBA lab (copper-clad glassfiber, seeed XIAOs, switch, LEDS...).
How much did they cost?
Approximately $1,200 in total, significantly lower than commercial alternatives.
What parts and systems were made?
The mechanical parts for the boogie boat, the circuits for the smart device, the electronic power train selection.
What tools and processes were used?
3D printing, CNC machining, waterproofing techniques, and embedded programming.
What questions were answered?
Can an affordable and effective towing device be made for hydrofoiling?
What worked? What didn't?
The propulsion system performed well, but battery will need to be revisited as well as fiberglassing the whole boat body.
How was it evaluated?
The EV functionality was tested under no-load conditions, and the LED indicators work as expected.
What are the implications?
This project makes hydrofoiling accessible in low-wind conditions, enabling more people to participate.