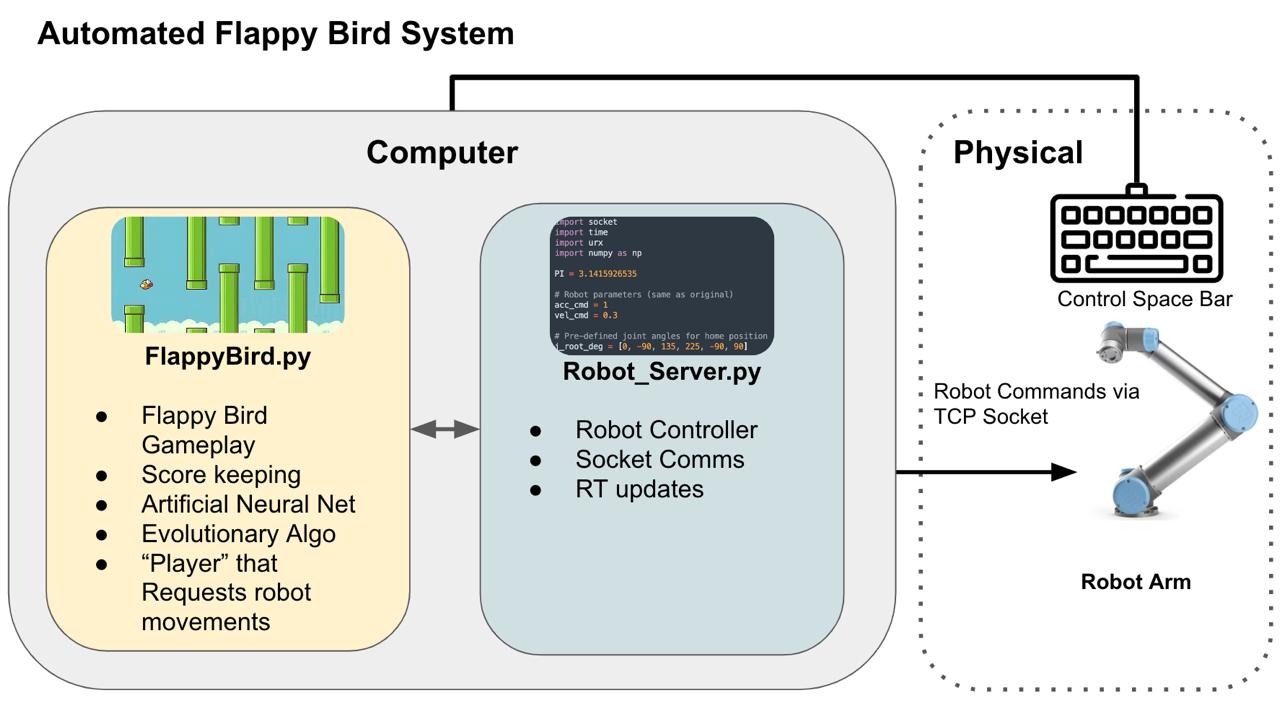
This is code for flappy bird game:
#
# (c) Marcello Tania 17/04/21
#
# This work may be reproduced, modified, distributed,
# performed, and displayed for any purpose. Copyright is
# retained and must be preserved. The work is provided
# as is; no warranty is provided, and users accept all
# liability.
#
import time
import pygame, sys, random
import numpy
# scipy.special for the sigmoid function expit()
import scipy.special
import socket
# Define the serial port and baud rate.
# Ensure the 'COM#' corresponds to what was seen in the Windows Device Manager
# Note: All robot commands have been replaced with socket sends to the robot server.
# Connect to robot server
HOST = '127.0.0.1' # or IP where robot_server.py is running
PORT = 50007
s = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
s.connect((HOST, PORT))
def send_robot_command(cmd):
s.sendall(cmd.encode('utf-8'))
# Send MOVE_HOME at the start
send_robot_command("MOVE_HOME")
PI = 3.1415926535
#keyboard = Controller()
# neural network class for the brain of the birds
class Individual():
# initialise the neural network
def __init__(self, inputnodes, hiddennodes, outputnodes,fitness):
# set number of nodes in each input, hidden, output layer
self.inodes = inputnodes
self.hnodes = hiddennodes
self.onodes = outputnodes
self.fitness = fitness
# link weight matrices, wih and who
# weights inside the arrays are w_i_j, where link is from node i to node j in the next layer
# w11 w21
# w12 w22 etc
'''
self.wih = numpy.random.normal(0.0, pow(self.hnodes,-0.5), (self.hnodes, self.inodes))
self.who = numpy.random.normal(0.0, pow(self.onodes,-0.5), (self.onodes, self.hnodes))
'''
self.wih = numpy.array([[-3.34829867, 0.61441159, 2.50556884, -0.37947868],
[ 0.3240327, 2.35160679, -1.94486032, -2.1700158 ],
[-2.62540542, 2.33445864, -0.46812661, -2.2635345 ],
[-1.00241636, 1.89882317, -2.77465566, -1.34619994],
[-0.20231266, 2.49082877, 1.08143091, 0.53047555],
[ 0.67497593, 1.52985698, -3.86579115, -0.20542114],
[ 2.7336978, 2.26497664, 1.96146316, -0.64662931]])
self.who = numpy.array([[-4.33668794, -1.30929065, 0.05054322, 0.16018827, 2.50858315, -0.42650511, -1.36117085]])
'''
self.wih = numpy.array([[-3.24829867, 1.06441159, 2.35556884, -0.17947868],
[ 0.6740327, 2.15160679, -1.54486032, -1.4700158 ],
[-2.72540542, 2.18445864, -0.81812661, -2.3135345 ],
[-0.85241636, 2.39882317, -2.52465566, -1.19619994],
[-0.05231266, 2.19082877, 0.88143091, 0.23047555],
[ 0.57497593, 1.57985698, -4.36579115, 0.19457886],
[ 2.6336978, 2.51497664, 1.51146316, -0.69662931]])
self.who = numpy.array([[-4.38668794, -1.20929065, 0.40054322, 0.16018827, 2.95858315, -0.42650511, -1.01117085]])
'''
# activation function is the sigmoid function
self.activation_function = lambda x: scipy.special.expit(x)
pass
# query the neural network
def query(self, inputs_list):
# convert inputs list to 2d array
inputs = numpy.array(inputs_list, ndmin=2).T
# calculate signals into hidden layer
hidden_inputs = numpy.dot(self.wih, inputs)
# calculate the signals emerging from hidden layer
hidden_outputs = self.activation_function(hidden_inputs)
# calculate signals into final output layer
final_inputs = numpy.dot(self.who, hidden_outputs)
# calculate the signals emerging from final output layer
final_outputs = self.activation_function(final_inputs)
return final_outputs
class Block(pygame.sprite.Sprite):
"""
Block class to take the surface and put a rectangle around it
and put it on the screen
"""
def __init__(self,path,x_pos,y_pos):
super().__init__()
self.image = pygame.image.load(path).convert()
self.image = pygame.transform.scale2x(self.image)
self.rect = self.image.get_rect(center = (x_pos,y_pos))
class Floor(Block):
"""
Floor class representing the floor of the game
"""
VEL = 1
def __init__(self,path,x_pos,y_pos):
super().__init__(path,x_pos,y_pos)
self.x_pos = x_pos
self.y_pos = y_pos
def move(self):
"""
Move floor so it looks like its scrolling
:param speed: the velocity of the floor
:return: None
"""
self.x_pos -= self.VEL
if self.x_pos <= -576:
self.x_pos = 576
def draw(self, screen):
"""
Draw the floor. This is two imgaes that move together.
:param screen: the pygame surface or window
:return: None
"""
screen.blit(self.image, (self.x_pos,self.y_pos))
class Bird(Block):
"""
Bird class representing the flappy bird
"""
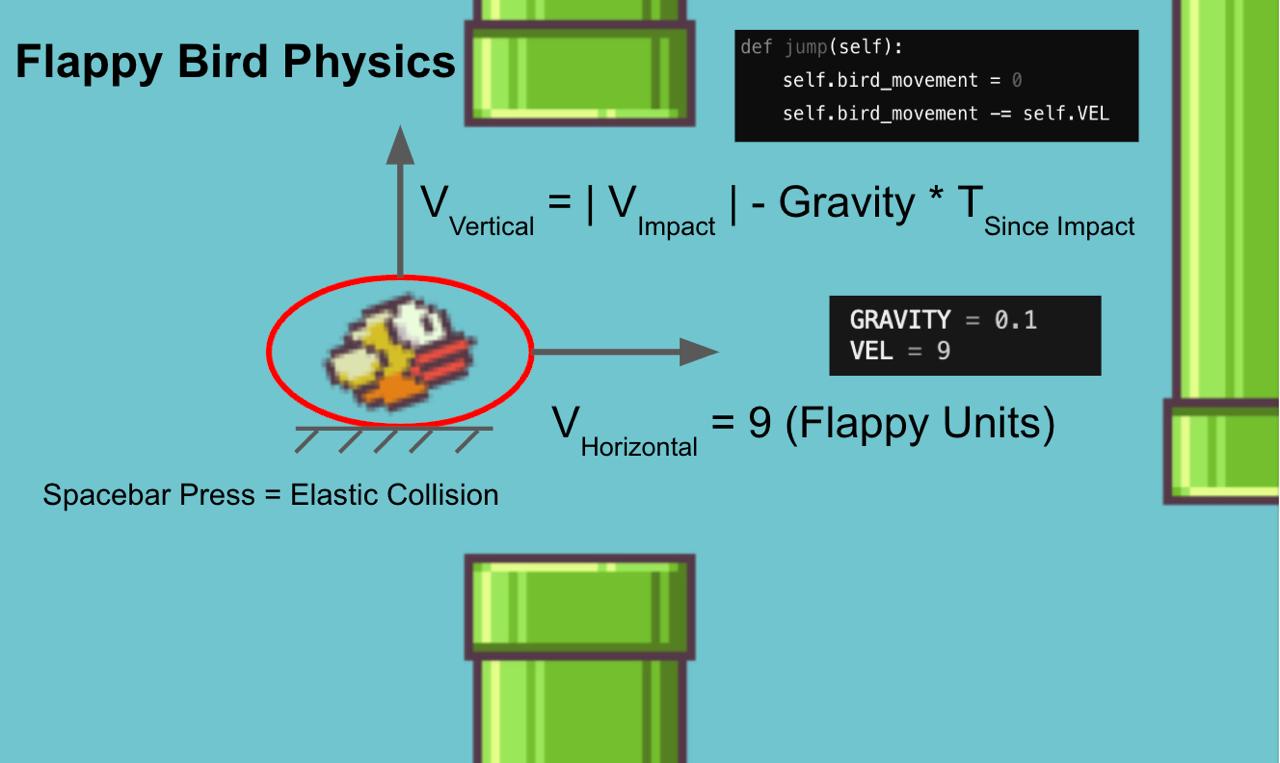
GRAVITY = 0.1
VEL = 9
def __init__(self,path,x_pos,y_pos):
"""
Initialize the object
:param x_pos: starting x pos (int)
:param y_pos: starting y pos (int)
:return: None
"""
super().__init__(path,x_pos,y_pos)
self.x_pos = x_pos
self.y_pos = y_pos
self.bird_movement = 0
self.score = 0
self.high_score = 0
def jump(self):
"""
make the bird jump
:return: None
"""
self.bird_movement = 0
self.bird_movement -= self.VEL
def move(self):
"""
Make the bird fall and jump
:param gravity: gravity velocity
:return: None
"""
self.bird_movement += self.GRAVITY
def check_collision(self, pipes):
"""
Check the bird if it collides vertically or with the pipes
:param pipes: list of the pipes
:return: True = collision detected
:return: False = no collision
"""
for pipe in pipes:
if self.rect.colliderect(pipe):
return False
if self.rect.top <= -100 or self.rect.bottom >= 900:
return False
return True
def draw(self, screen):
"""
Draw the bird
:param win: the pygame surface or window
:return: None
"""
self.rect.y += self.bird_movement
screen.blit(self.image, (self.rect.x,self.rect.y))
def pos_y(self):
"""
Bird postition
:return: y position of bird
"""
return self.rect.y
def pipe_score_check(self, pipes):
"""
Add score if bird pass through the pipes
:return: None
"""
if pipes:
for pipe in pipes:
if 95 < pipe.centerx < 105:
self.score += 0.5
def update_score(self):
"""
Check for new high score
:return: high score
"""
if self.score > self.high_score:
self.high_score = self.score
return self.high_score
def score_display(self):
"""
Display score and highscore
:return: none
"""
score_surface = game_font.render(f'Score: {int(self.score)}',True,(255,255,255))
score_rect = score_surface.get_rect(topleft = (20,50))
screen.blit(score_surface, score_rect)
score_surface = game_font.render(f'High score: {int(self.update_score())}',True,(255,255,255))
score_rect = score_surface.get_rect(topleft = (20,100))
screen.blit(score_surface, score_rect)
class Pipe():
"""
Pipe class representing the pipes
"""
VEL = 10
GAP = 500
HEIGHT = [490,550,600]
X_INIT = 700
def __init__(self,path):
"""
Initialize the object
:return: None
"""
self.image = pygame.image.load(path).convert()
self.image = pygame.transform.scale2x(self.image)
#self.height = self.image.get_height()
def create_pipe(self):
"""
Create a list of top and bottom pipes
:return: tupple of top and bottom pipes
"""
random_pipe_pos = random.choice(self.HEIGHT)
bottom_pipe = self.image.get_rect(midtop = (self.X_INIT,random_pipe_pos))
top_pipe = self.image.get_rect(midbottom = (self.X_INIT,random_pipe_pos - self.GAP))
return bottom_pipe,top_pipe
def move(self, pipes):
"""
Move all the pipes
:return: visible pipes list
"""
for pipe in pipes:
pipe.centerx -= self.VEL
visible_pipes = [pipe for pipe in pipes if pipe.right> -50]
return visible_pipes
def draw(self, screen, pipes):
"""
Draw the pipe.
:param screen: the pygame surface or window
:return: None
"""
for pipe in pipes:
if pipe.bottom >= 1024:
screen.blit(self.image, pipe)
else:
flip_pipe = pygame.transform.flip(self.image,False,True)
screen.blit(flip_pipe, pipe)
def pos_x(self, pipes):
# only take the pipe in front of the bird and shown on the screen
visible_pipes = [pipe for pipe in pipes if pipe.centerx > 100 and pipe.right < 550]
# only take the bottom pipe because top and bottom pipes x positions are the same
bottom_pipes = [pipe for pipe in visible_pipes if pipe.bottom >= 1024]
for pipe in bottom_pipes:
x = pipe.centerx
return x
def pos_y_bottom(self,pipes):
# To do: Find the clossest pipe
visible_pipes = [pipe for pipe in pipes if pipe.centerx > 100 and pipe.right < 550]
# only take the bottom pipe because top and bottom pipes x positions are the same
bottom_pipes = [pipe for pipe in visible_pipes if pipe.bottom >= 1024]
for pipe in bottom_pipes:
y = pipe.top
return y
def pos_y_top(self,pipes):
# To do: Find the clossest pipe
visible_pipes = [pipe for pipe in pipes if pipe.centerx > 100 and pipe.right < 550]
# only take the bottom pipe because top and bottom pipes x positions are the same
bottom_pipes = [pipe for pipe in visible_pipes if pipe.bottom >= 1024]
for pipe in bottom_pipes:
y = pipe.top + self.GAP
return y
def end_game():
send_robot_command("MOVE_DOWN")
print('Generation\tBest fitness')
print('------------------------------------')
for i in range(1,gen+1):
print('{}\t{}'.format(i,best_fitness[i]))
print('The best so far is {}:'.format(round(best_so_far.fitness,5)))
print('The best so far who {}:'.format(best_so_far.who))
print('The best so far wih {}:'.format(best_so_far.wih))
pygame.quit()
sys.exit()
# General Setup
pygame.init()
clock = pygame.time.Clock()
game_font = pygame.font.Font('04B_19.ttf',40)
# Main Window
screen = pygame.display.set_mode((576,1024))
bg_surface = pygame.image.load('assets/background-day.png').convert()
bg_surface = pygame.transform.scale2x(bg_surface)
# Game Objects
floor_surface1 = Floor('assets/base.png',0,900)
floor_surface2 = Floor('assets/base.png',576,900)
bird_surface = Bird('assets/bluebird-midflap.png',100,512)
pipe_surface = Pipe('assets/pipe-green.png')
pipe_list = []
SPAWNPIPE = pygame.USEREVENT
pygame.time.set_timer(SPAWNPIPE,800)
# Global Variable
game_active = True
# number of input, hidden and output nodes
input_nodes = 4
hidden_nodes = 7
output_nodes = 1
POP_SIZE = 10 # defining population size
NUM_GEN = 300
X_BIAS = 0.8
MUT_RATE = 0.3
STEP_SIZE = 0.05
person = [None] * POP_SIZE
offspring = [None] * POP_SIZE
best_fitness = [None] * (NUM_GEN+1)
flag_dead = False
indiv = 0
gen = 1
# initialize best so far
best_so_far = Individual(input_nodes,hidden_nodes,output_nodes,0)
# Create first population
print('Geration : 0, HELLO WORLD!')
print('Indiv\twho\tFitness')
print('------------------------------------------------')
for i in range(POP_SIZE):
person[i] = Individual(input_nodes,hidden_nodes,output_nodes,0)
offspring[i] = person[i]
print('{}\t{}\t{}'.format(i,
person[i].who,
'UNKNOWN'))
for x in range(1000):
send_robot_command("MOVE_DOWN")
while True:
for event in pygame.event.get():
if event.type == pygame.QUIT:
end_game()
if event.type == pygame.KEYDOWN:
if event.key == pygame.K_SPACE and game_active:
bird_surface.jump()
if event.key == pygame.K_SPACE and game_active == False:
game_active = True
bird_surface.rect.center = (100,512)
bird_surface.bird_movement = 0
pipe_list.clear()
bird_surface.score = 0
for x in range(1000):
send_robot_command("MOVE_DOWN")
flag_dead = False
if event.type == SPAWNPIPE:
pipe_list.extend(pipe_surface.create_pipe())
# Background
screen.blit(bg_surface, (0,0))
if game_active:
# Bird
bird_surface.draw(screen)
bird_surface.move()
game_active = bird_surface.check_collision(pipe_list)
# Pipe
pipe_list = pipe_surface.move(pipe_list)
pipe_surface.draw(screen,pipe_list)
bird_surface.pipe_score_check(pipe_list)
bird_surface.score_display()
# Data input
bird_y = bird_surface.pos_y()
pipes_x = pipe_surface.pos_x(pipe_list)
pipe_y_bottom = pipe_surface.pos_y_bottom(pipe_list)
pipe_y_top = pipe_surface.pos_y_top(pipe_list)
person[indiv].fitness += 0.01
# Keep it neutral when the pipes has not shown on the screen
if pipes_x == None:
pipes_x = 500
pipe_y_bottom = 600
pipe_y_top = 900
data_inputs = numpy.array([bird_y, pipes_x, pipe_y_bottom, pipe_y_top])
# Bird think using the Artificial Neural Network
data_output = person[indiv].query(data_inputs)
if data_output >= 0.5:
#send H to microcontroler
send_robot_command("MOVE_UP")
#bird_surface.jump()
else:
send_robot_command("MOVE_DOWN")
# Show Bird ID on screen
indiv_surface = game_font.render(f'Bird ID: {indiv}',True,(255,255,255))
screen.blit(indiv_surface, (20,10))
# Show generation on screen
gen_surface = game_font.render(f'Generation: {gen}',True,(255,255,255))
screen.blit(gen_surface, (20,150))
else:
# Print the performance after the player is death
if flag_dead == False:
flag_dead = True
send_robot_command("MOVE_UP")
if indiv < POP_SIZE-1:
game_active = True
bird_surface.rect.center = (100,512)
bird_surface.bird_movement = 0
pipe_list.clear()
bird_surface.score = 0
#person[indiv].fitness = 0
flag_dead = False
indiv += 1
else:
# select parents and generating offspring phenotype
for indiv in range(POP_SIZE):
#Mom
i1 = random.randrange(POP_SIZE) # choose parent
i2 = random.randrange(POP_SIZE) # choose parent
i3 = random.randrange(POP_SIZE) # choose parent
#Tournament
if person[i1].fitness >= person[i2].fitness:
mom = i1
else:
mom = i2
if person[i3].fitness >= person[mom].fitness:
mom = i3
#Dad
i1 = random.randrange(POP_SIZE) # choose parent
i2 = random.randrange(POP_SIZE) # choose parent
i3 = random.randrange(POP_SIZE) # choose parent
#Tournament
if person[i1].fitness >= person[i2].fitness:
dad = i1
else:
dad = i2
if person[i3].fitness >= person[dad].fitness:
dad = i3
#Crossover
# Crossover for who
for i in range(hidden_nodes):
if random.random()< X_BIAS:
offspring[indiv].who[0,i] = person[mom].who[0][i]
else:
offspring[indiv].who[0,i] = person[dad].who[0][i]
# Crossover for wih
for i in range(input_nodes):
for ii in range(hidden_nodes):
if random.random()< X_BIAS:
offspring[indiv].wih[ii,i] = person[mom].wih[ii][i]
else:
offspring[indiv].wih[ii,i] = person[dad].wih[ii][i]
#Mutation
# Mutation for who
for i in range(hidden_nodes):
if random.random()< MUT_RATE:
r = (random.randint(0, 1))%2 *2-1 # create a number either -1 or 1 (sign)
offspring[indiv].who[0,i] += r*STEP_SIZE
# Mutation for wih
for i in range(input_nodes):
for ii in range(hidden_nodes):
if random.random()< MUT_RATE:
r = (random.randint(0, 1))%2 *2-1 # create a number either -1 or 1 (sign)
offspring[indiv].wih[ii,i] += r*STEP_SIZE
# update statistical analysis
best_fitness[gen] = person[0].fitness
print('Generation : {}'.format(gen))
print('Indiv\twho\tFitness')
print('------------------------------------------------')
for i in range(POP_SIZE):
print('{}\t{}\t{}'.format(i,
person[i].who,
round(person[i].fitness,5)))
#update statistical analysis
if person[i].fitness >= best_fitness[gen]:
best_indiv = i
best_fitness[gen] = person[i].fitness
if best_fitness[gen] > best_so_far.fitness:
best_so_far.who = person[best_indiv].who.copy()
best_so_far.wih = person[best_indiv].wih.copy()
best_so_far.fitness = person[best_indiv].fitness
print('The best fitness is {}'.format(round(best_fitness[gen],5)))
print('The best so far is {}:'.format(round(best_so_far.fitness,5)))
print('Offspring :')
print('Indiv\twho\tFitness')
print('------------------------------------------------')
for i in range(POP_SIZE):
print('{}\t{}\t{}'.format(i,
person[i].who,
'UNKNOWN'))
# Restart for having a new generation
if gen < NUM_GEN:
gen += 1
game_active = True
bird_surface.rect.center = (100,512)
bird_surface.bird_movement = 0
pipe_list.clear()
bird_surface.score = 0
indiv = 0 # restart for having a new generation
flag_dead = False
# Next generation parents are replaced by the offspring
for i in range(POP_SIZE):
person[i] = offspring[i]
#restart fitness
person[i].fitness = 0
#TO DO with best so far
else :
end_game()
# Floors
floor_surface1.draw(screen)
floor_surface2.draw(screen)
floor_surface1.move()
floor_surface2.move()
pygame.display.update()
clock.tick(120)