For my final project idea, there are several factors to consider as I try to choose an architecture. The most robust option that will give me the most flexibility down the line is the ESP32. This has built-in Wi-Fi and Bluetooth capabilities to allow me to communicate with the chandelier remotely. I’m not opposed to using something like the RP2040 from Raspberry Pi and hard-wiring the chandelier if that option ends up being more feasible for this semester.
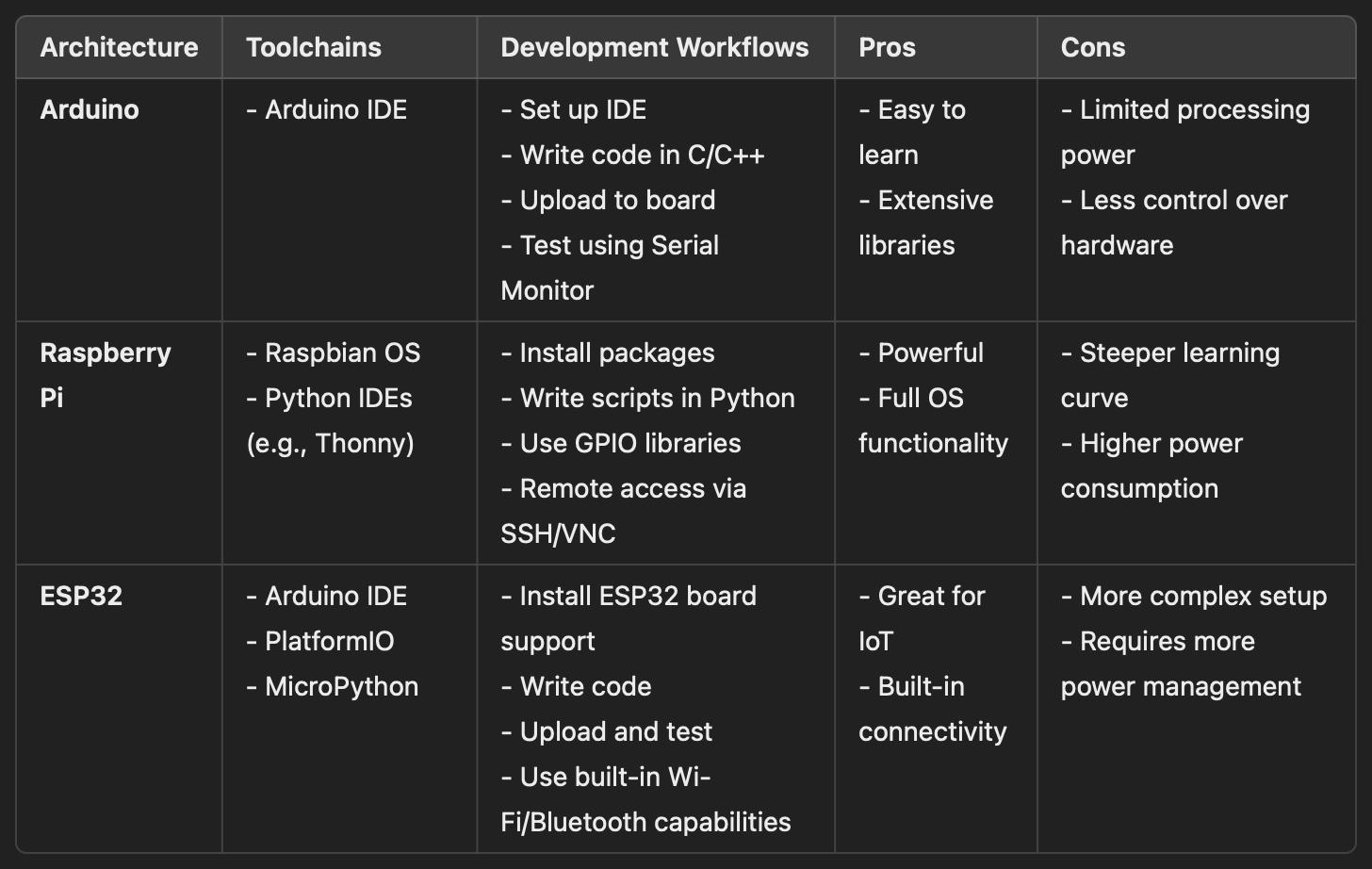
Since I’m new to this and was having a hard time with the terminology, I had chatGPT compile a chart to compare my options for the project with pros and cons, and fact-checked the output it gave me.
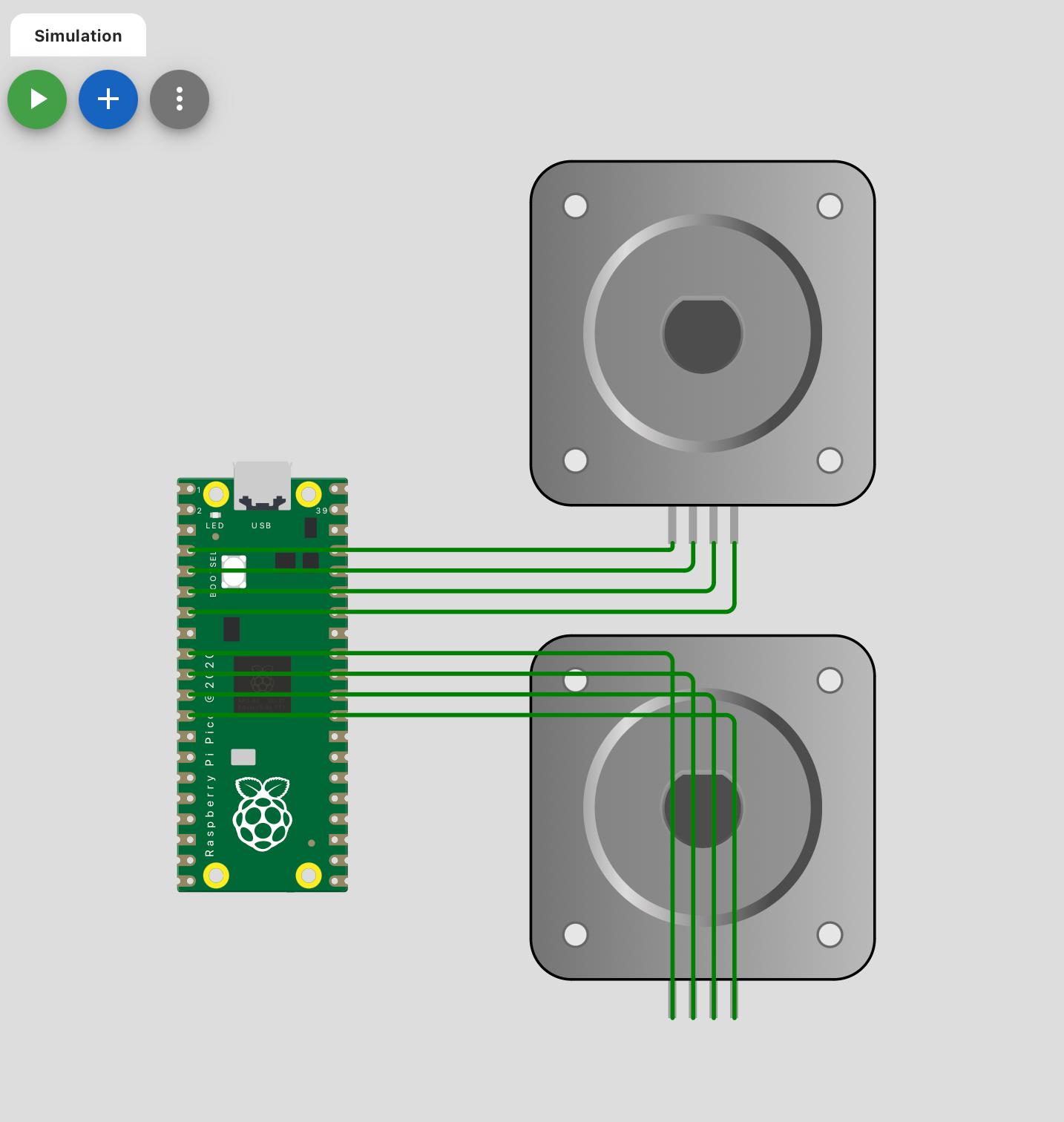
For the motor/pulley system to drive my project, I am not sure what the best route will be. I’m thinking DC motors might work well to handle the weight of a lightbulb, but I need to do more research into how well they can wind a pulley and cord. Wokwi does not have any DC motors, though, so for this week I focused on using the RP2040 to control two stepper motors instead.
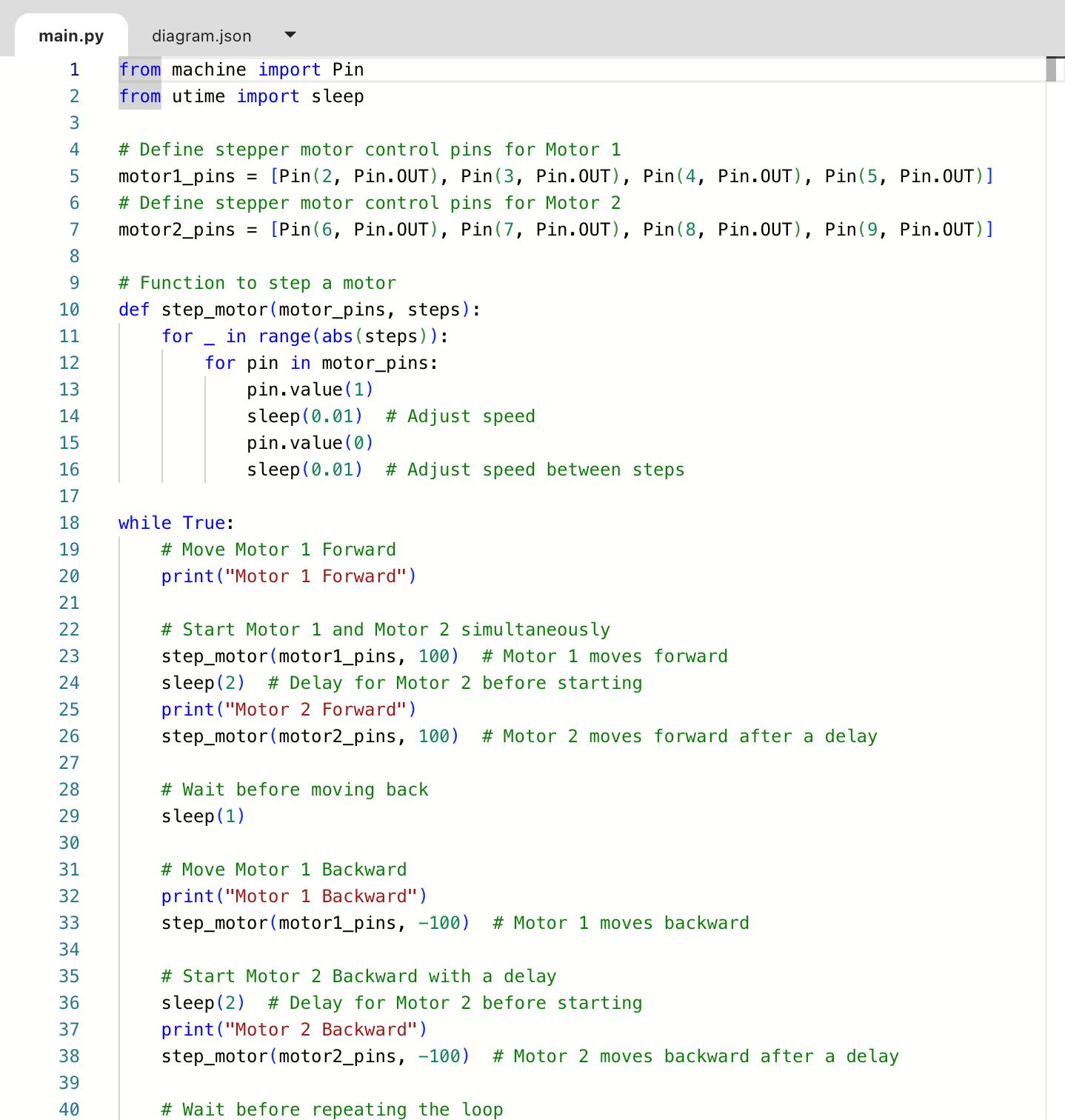
I wired the board to the motors and used chatGPT to help generate code that allows me to control their motion and direction, since I will need my motors to eventually move both forwards and backwards to wind and unwind the cord, raising and lowering the lights.
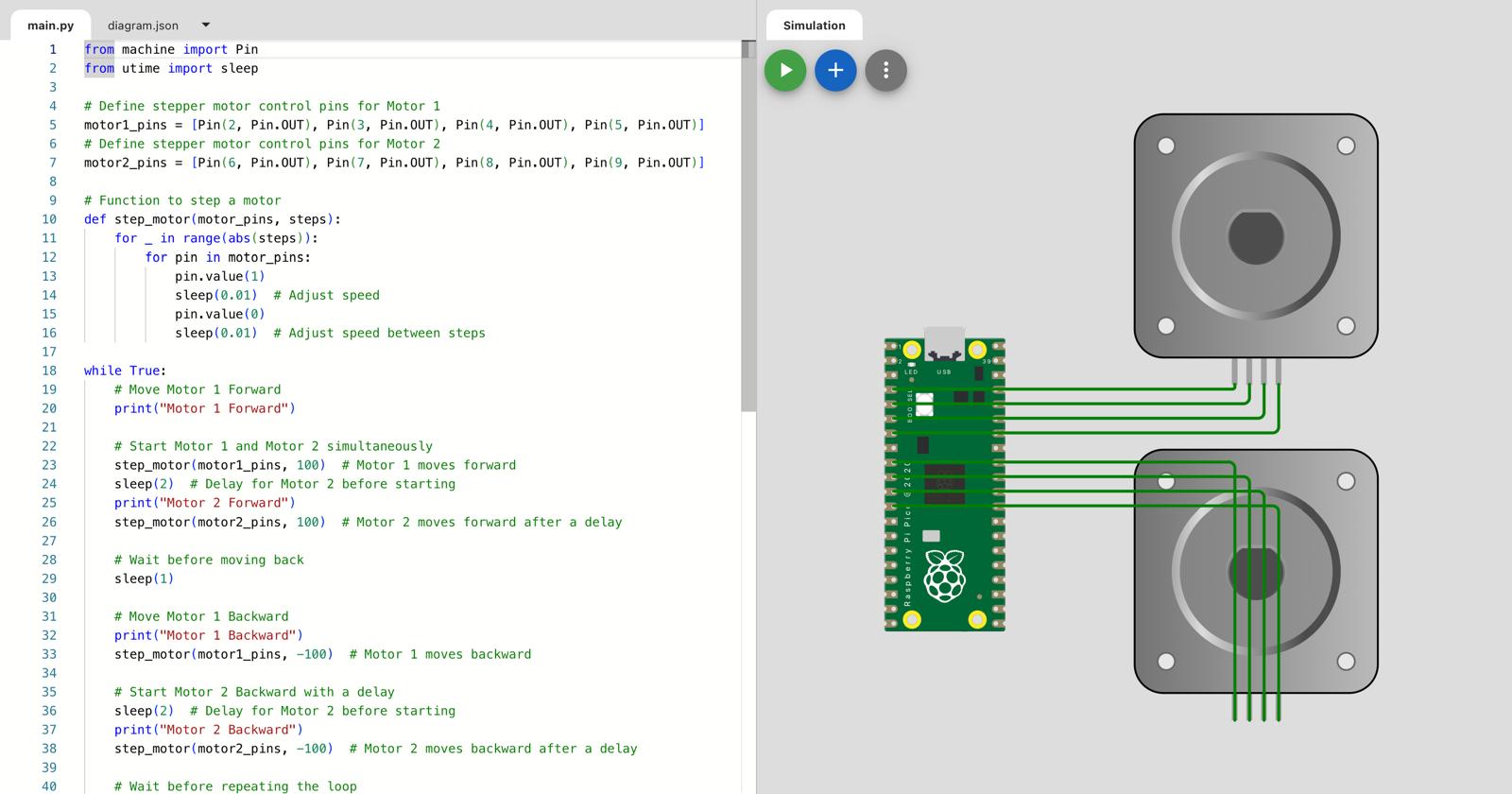
This was a successful first attempt, and I was able to modify the code to change the sequence of motors, but now I need to start thinking about what will be different in my actual build and get some advice and feedback on the hardware and electronics that will help me make this happen.