Introduction
This week I experimented with servos and solenoids, either/both of which I would eventually like to use in my final project (a piano-playing robot).
Testing a Servo Motor
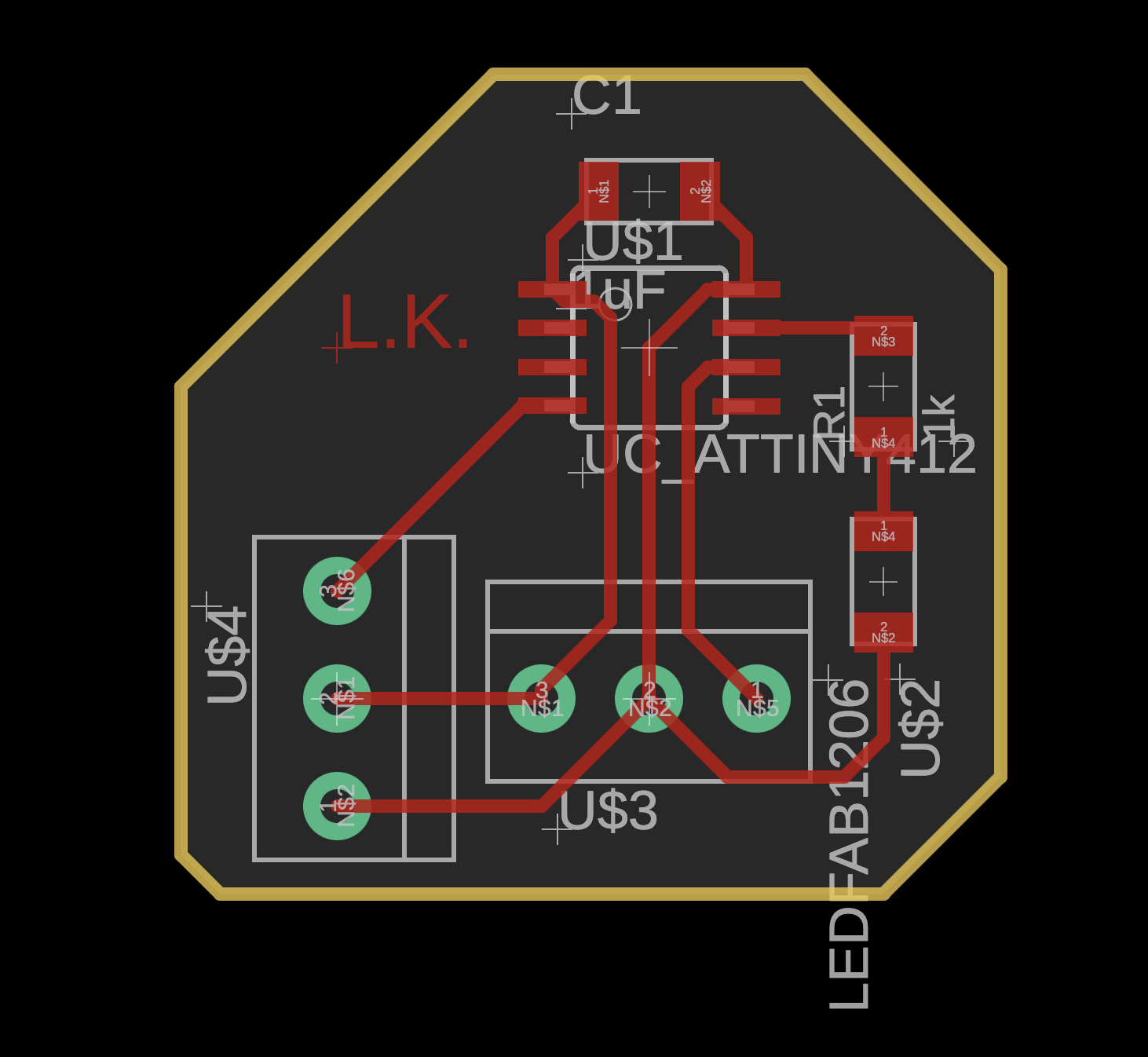
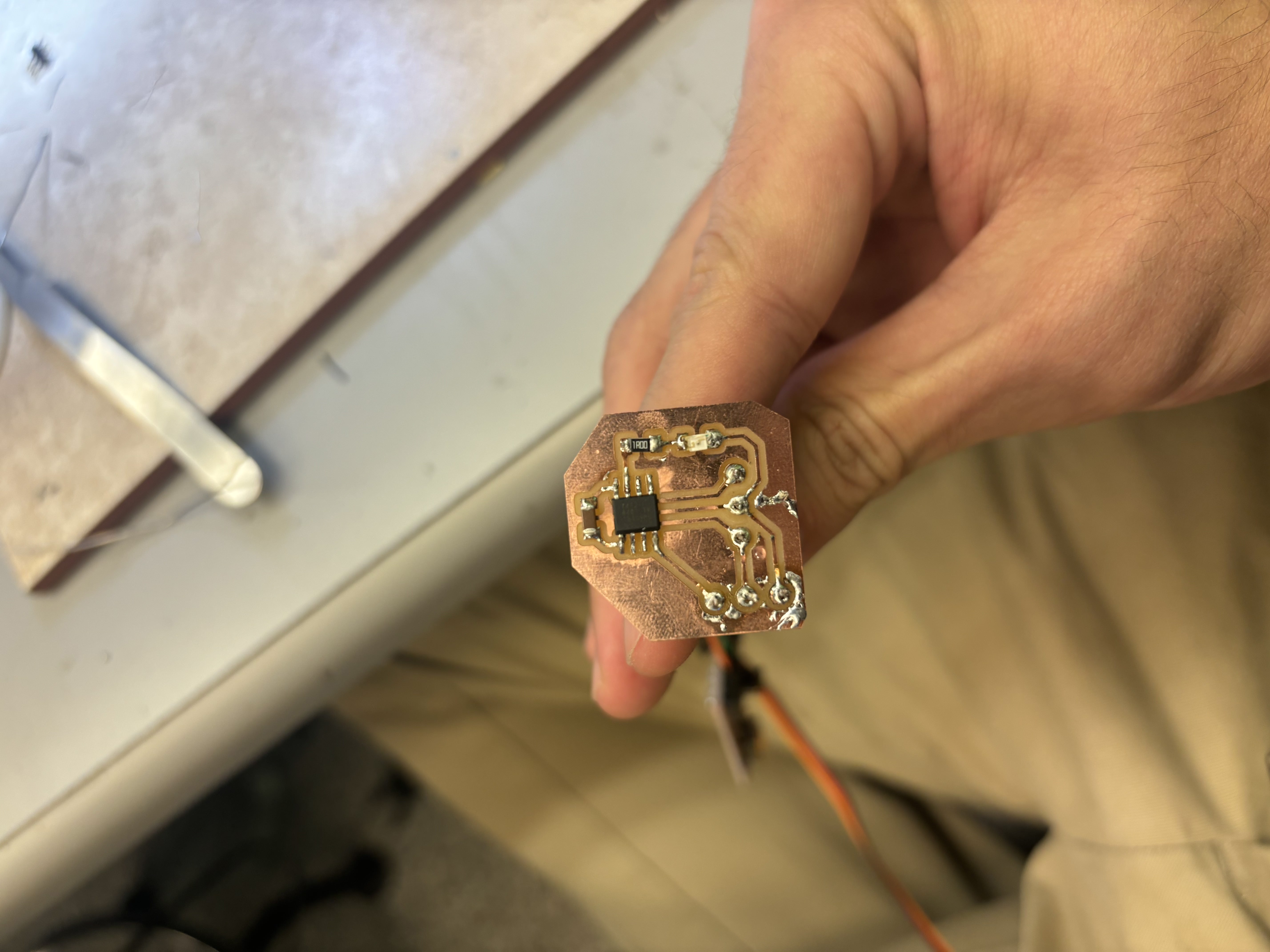
I first experimented with driving a servo motor. I created a test board for the ATTiny412 based on class board diagrams. Here is the PCB design and a photo of the soldered board:
I successfully drove a single servo motor using the following code:
#include <Servo.h>
#define delaytime 50
#define LED 4
#define SERVO 2
Servo servo;
int angle = 0;
void setup() {
pinMode(LED, OUTPUT);
servo.attach(SERVO);
}
void loop() {
for (angle = 0; angle <= 180; ++angle) {
servo.write(angle);
delay(delaytime);
}
for (angle = 180; angle >= 0; --angle) {
servo.write(angle);
delay(delaytime);
}
}
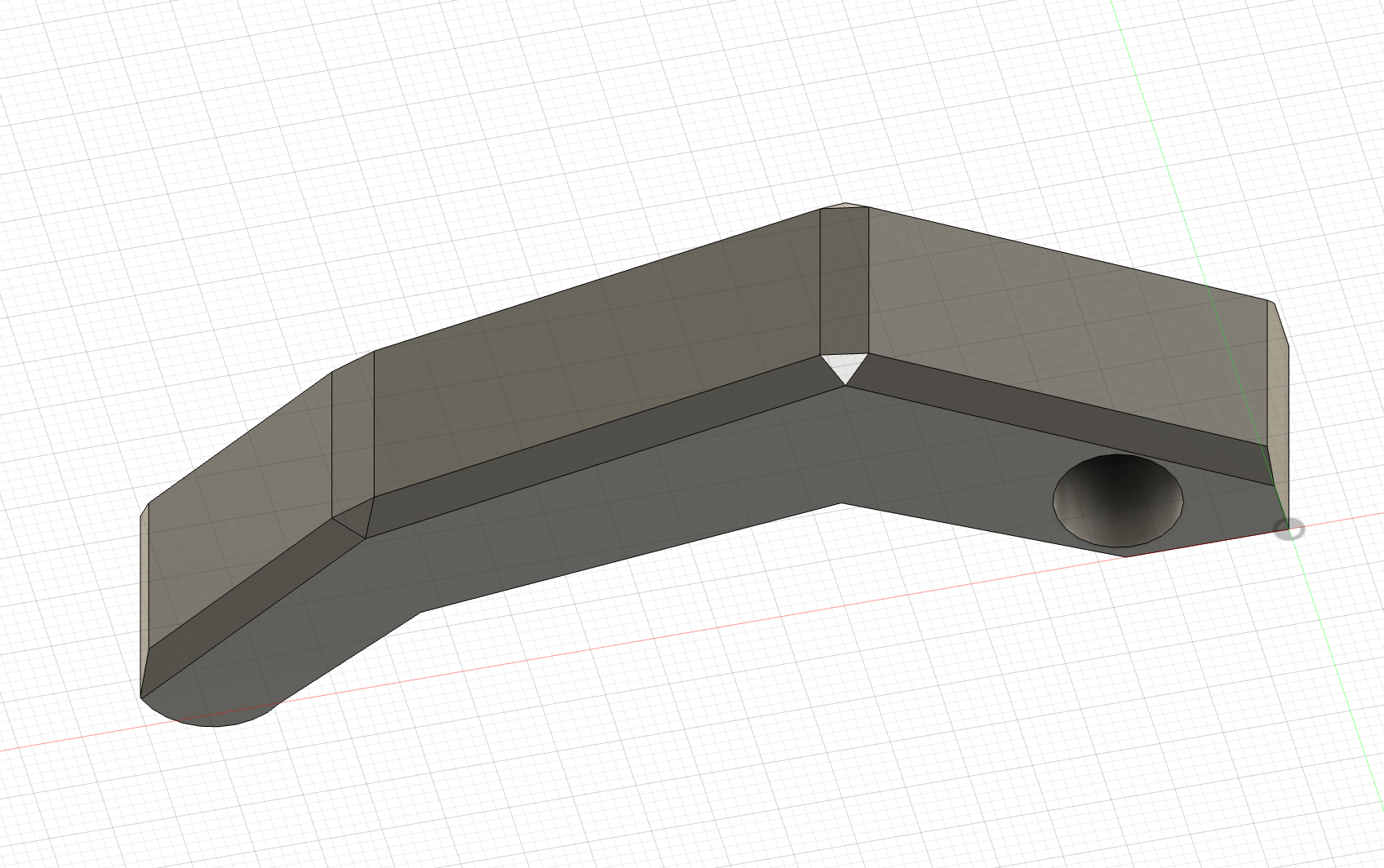
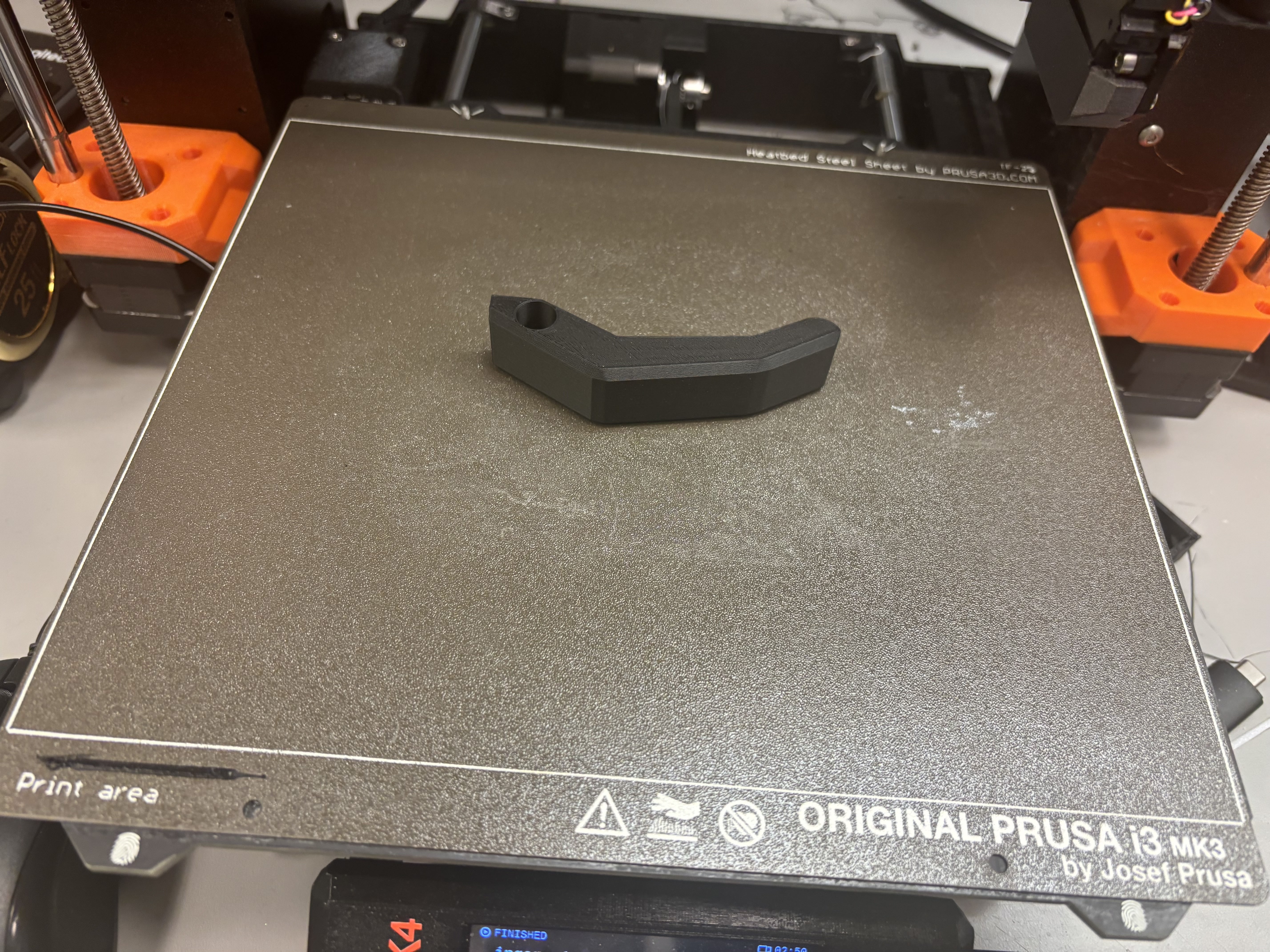
This code worked, although there was some nondeterministic behavior, likely due to power issues. I then designed and 3D-printed a "finger" attachment to fit onto the spindle of the servo to press down a piano key. Here is the model and a photo of the printed part:
Testing Solenoids with XIAO ESP32-C3
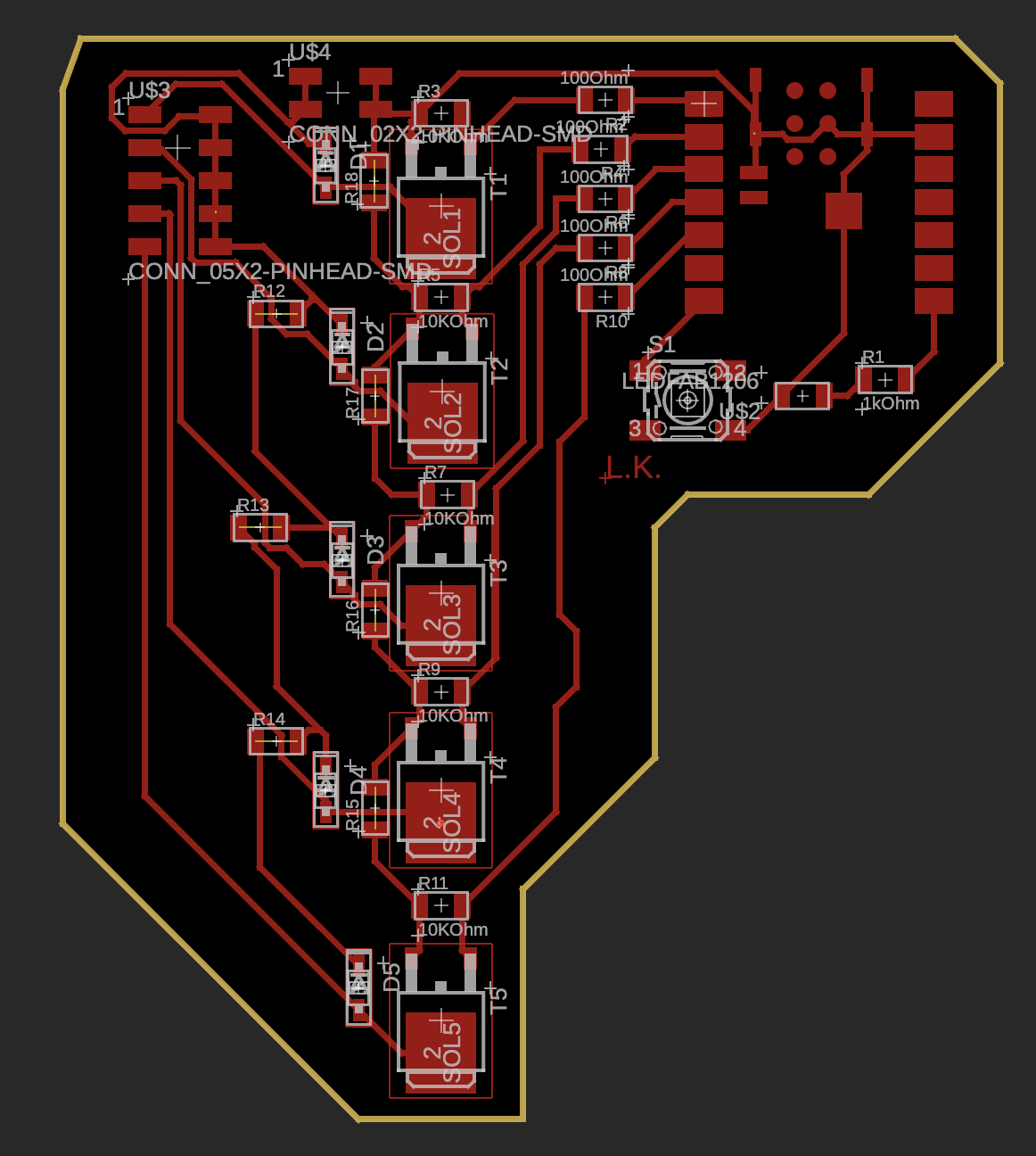
Next, I designed and milled a PCB using the XIAO ESP32-C3 to control 5 N-MOSFETs, which guide 5 solenoids powered by a 12V supply. Here’s the PCB design:
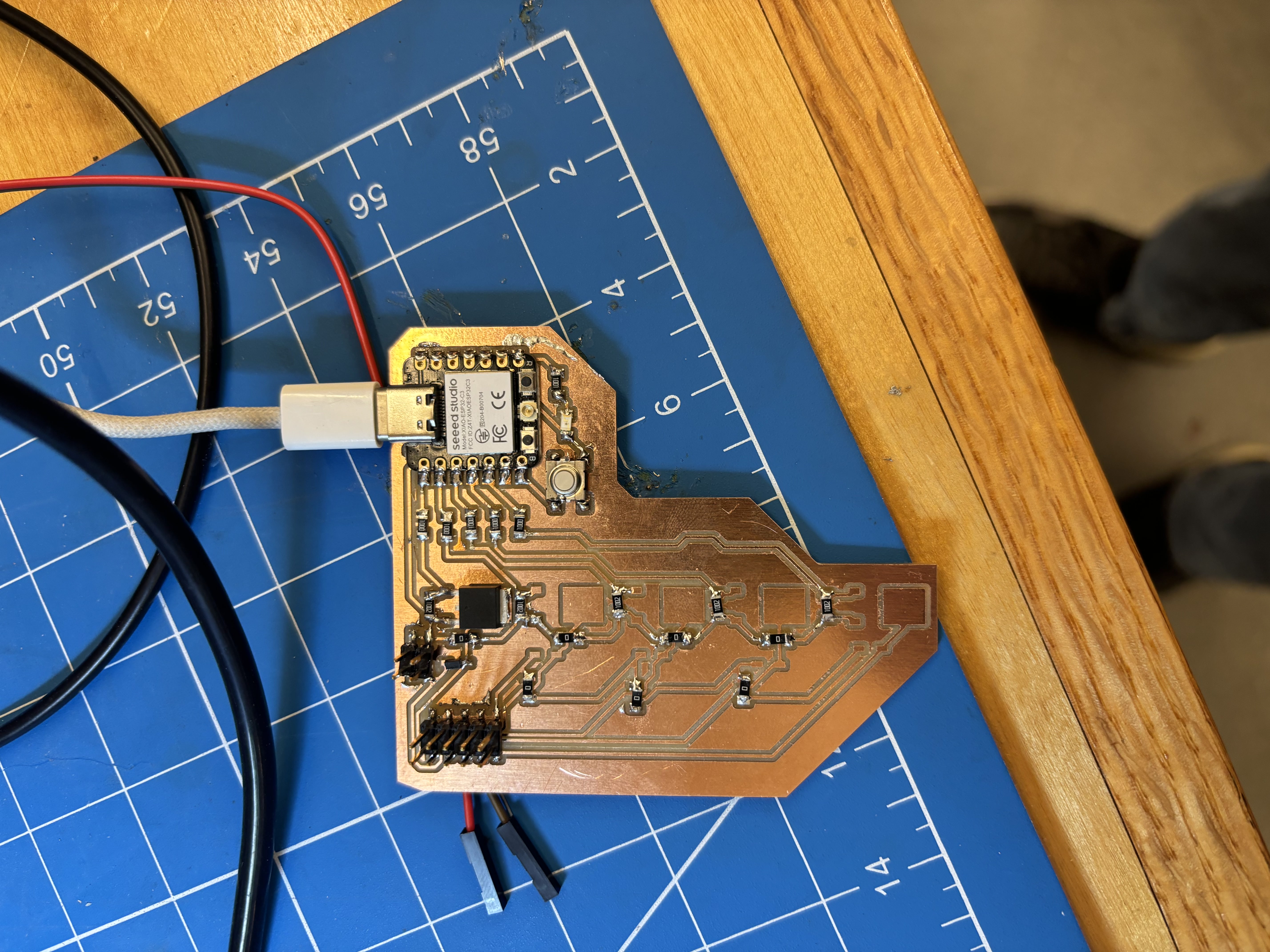
After milling and soldering the necessary components, I tested a single solenoid, then moved on to controlling all five solenoids. Here’s the code I used for driving the solenoids:
#define NUM_SOLENOIDS 5
int solenoidPins[NUM_SOLENOIDS] = {D0, D1, D2, D3, D4}; // Define solenoid GPIO pins
void setup() {
for (int i = 0; i < NUM_SOLENOIDS; i++) {
pinMode(solenoidPins[i], OUTPUT); // Set each solenoid pin as output
}
}
void loop() {
for (int i = 0; i < NUM_SOLENOIDS; i++) {
digitalWrite(solenoidPins[i], HIGH); // Activate the current solenoid
delay(1000); // Keep it activated for 1 second
digitalWrite(solenoidPins[i], LOW); // Deactivate the current solenoid
delay(1000); // Keep it deactivated for 1 second
}
}
Here are the videos demonstrating the solenoids in action:
One challenge was ensuring the ESP32-C3 and 12V power supply grounds were connected to activate the solenoids correctly.
Testing Solenoid on Piano Key
I attached my 3D-printed finger underneath the solenoid rod and tested it on a piano key. Here’s the video:
Testing LM4871 Circuit for Audio Output
Finally, I added a speaker to the LM4871 amplifier circuit from my PCB Piano project (Week 5). Here it is in action, demonstrating sine, square, triangle, and sawtooth waveforms: