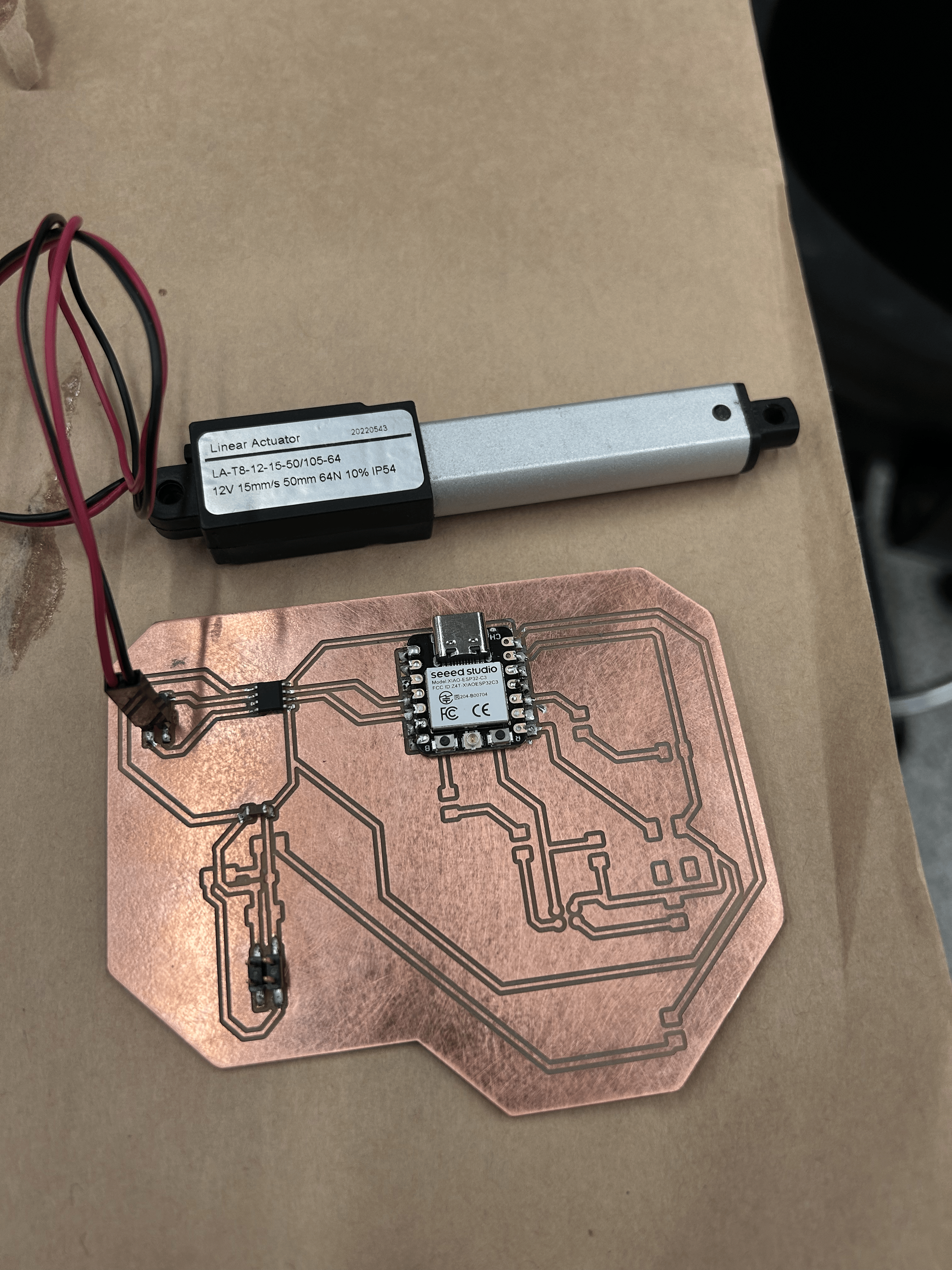
This week, I added a linear actuator to my custom-designed PCB board. The goal was to control the actuator so it moves in and out, simulating the functionality of a door lock. My plan is to incorporate this setup into my final project, where I aim to implement either voice or facial recognition to activate the lock mechanism.
Process & Learning Outcomes
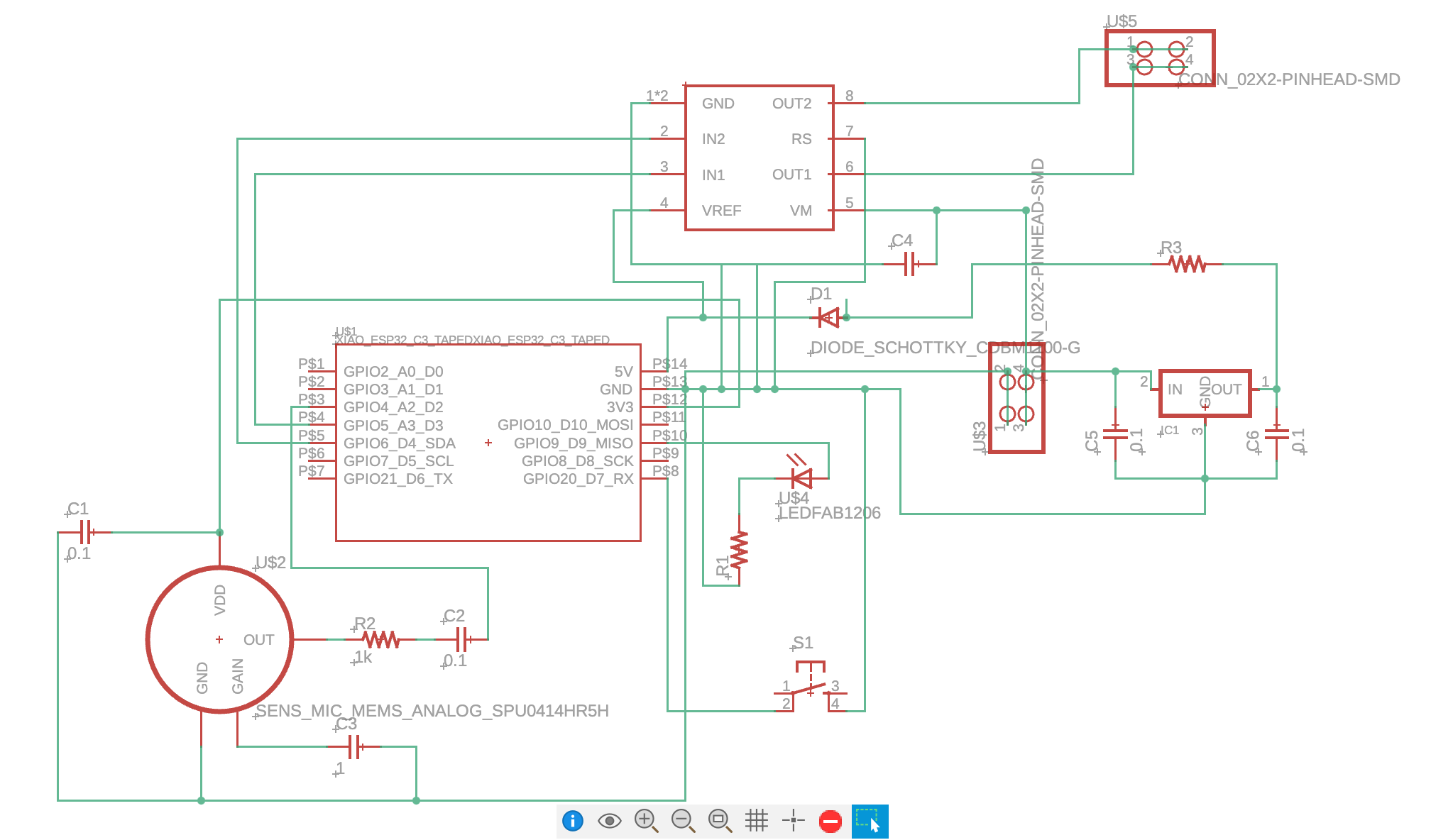
Working with the linear actuator required me to understand how to manage its direction and power. I spent a lot of time reading the datasheet and learned about using an H-bridge, which controls the motor's direction by altering the current flow. This component is essential for making the actuator move both in and out.
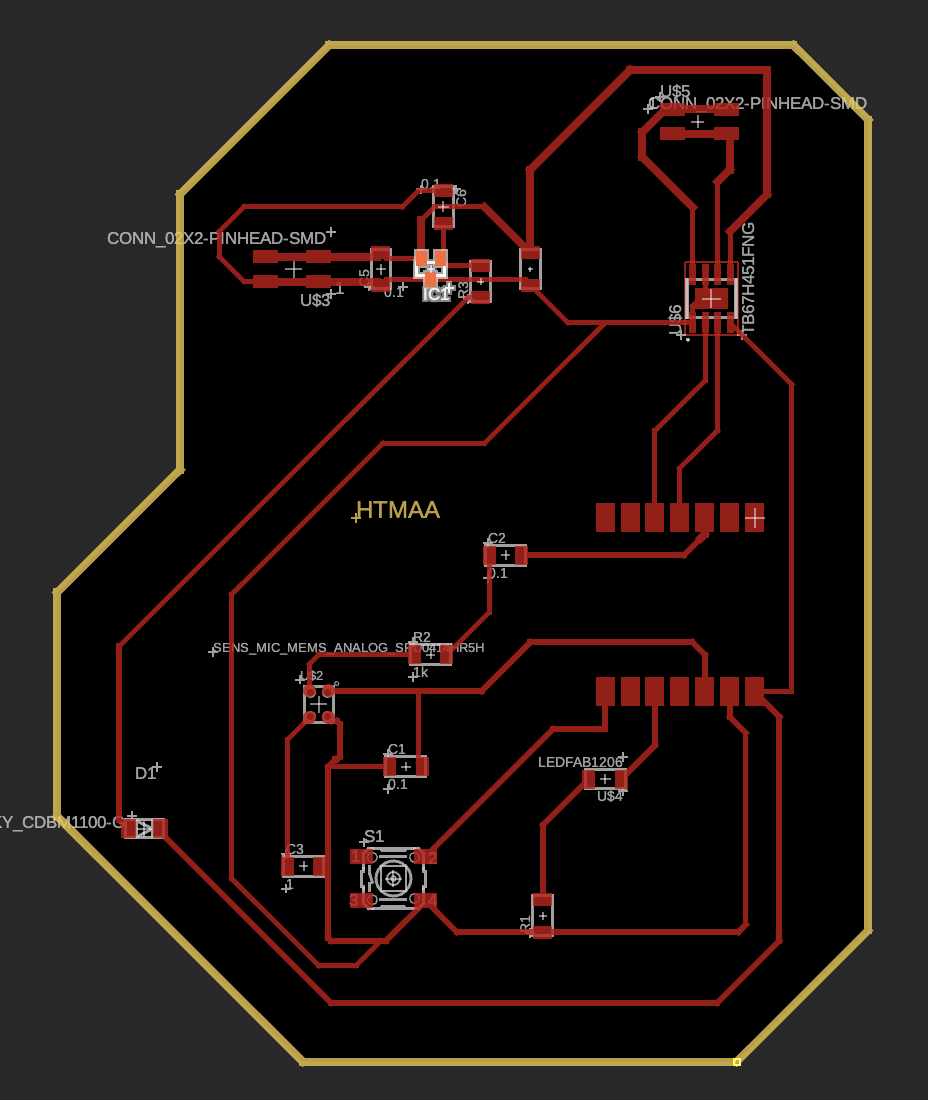
With guidance from Sam, I designed a new PCB board to support the actuator’s power requirements. I was genuinely surprised that I could power a 3-amp linear actuator with my computer's USB power, showing the versatility and power-handling capabilities of the setup.
Video Demonstration
Below is a video demonstrating the actuator controlled by my PCB:
Reflection
This week taught me a lot about reading and interpreting datasheets, particularly for complex components like the H-bridge, which is essential for directional control in motors. The hands-on experience of designing a new PCB specifically for this actuator was challenging but rewarding. With the help of Sam, I was able to troubleshoot and power the actuator successfully.
Moving forward, I’m excited to see how this actuator will integrate into my final project, where I hope to control it with either voice or facial recognition for a smart door lock mechanism. Shout out to Sam for his assistance and for helping me through the PCB design process!