Wildcard Week
DJ ROBOT PEFORMANCE: https://www.youtube.com/watch?v=pkIqNsfwNGo&feature=youtu.be
Overall Setup!

First, we marked x = 0, y = 0 on the bed to get the relative coordinates of the DJ board.

Thanks to the Flappy Bird team for the pawesome end effector :D


Then, it was all code to move the robot around!
The robot is controlled using the URX library, which provides an interface to control the robot.
You connect to the robot over WiFi, using the robot’s IP address.
Getting the robot’s root position:
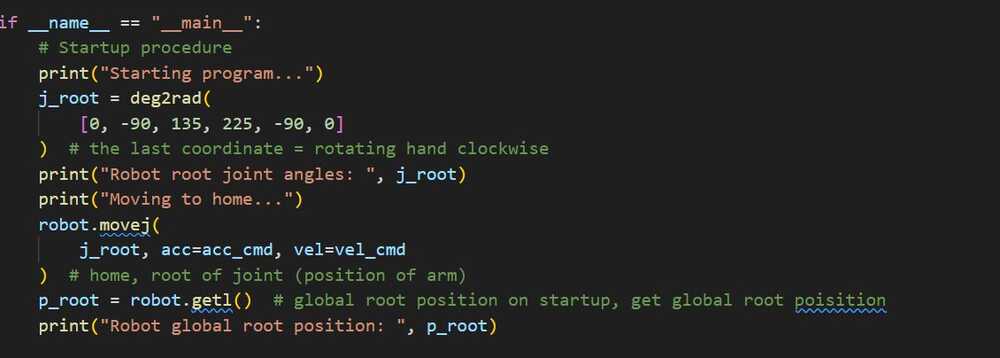
Moving everything relative to the root - the robot arm couldn’t go super slow without the program crashing since it detects that the robot isn’t moving at all, so I stepped through slow movements.
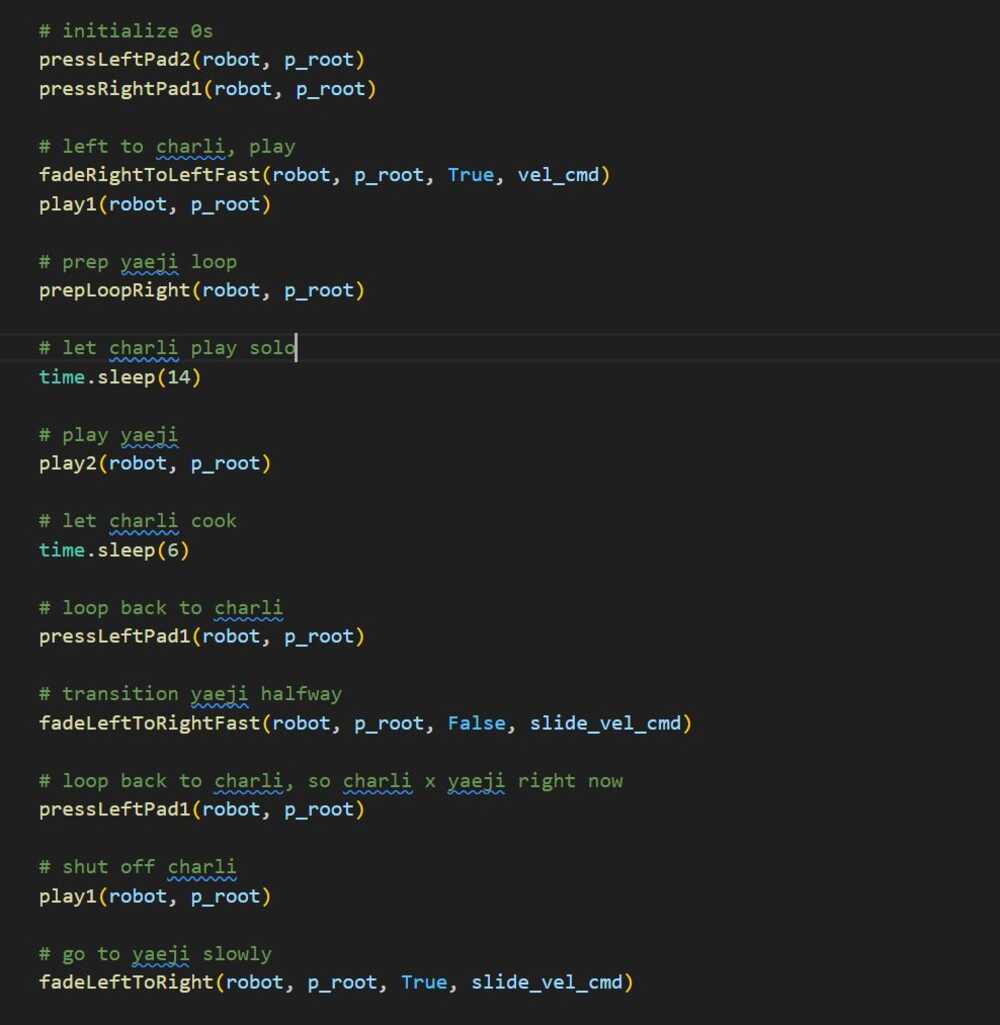
Built a bunch of functions, and calibrated it so that timing/location would be correct (and it wouldn’t break the board)
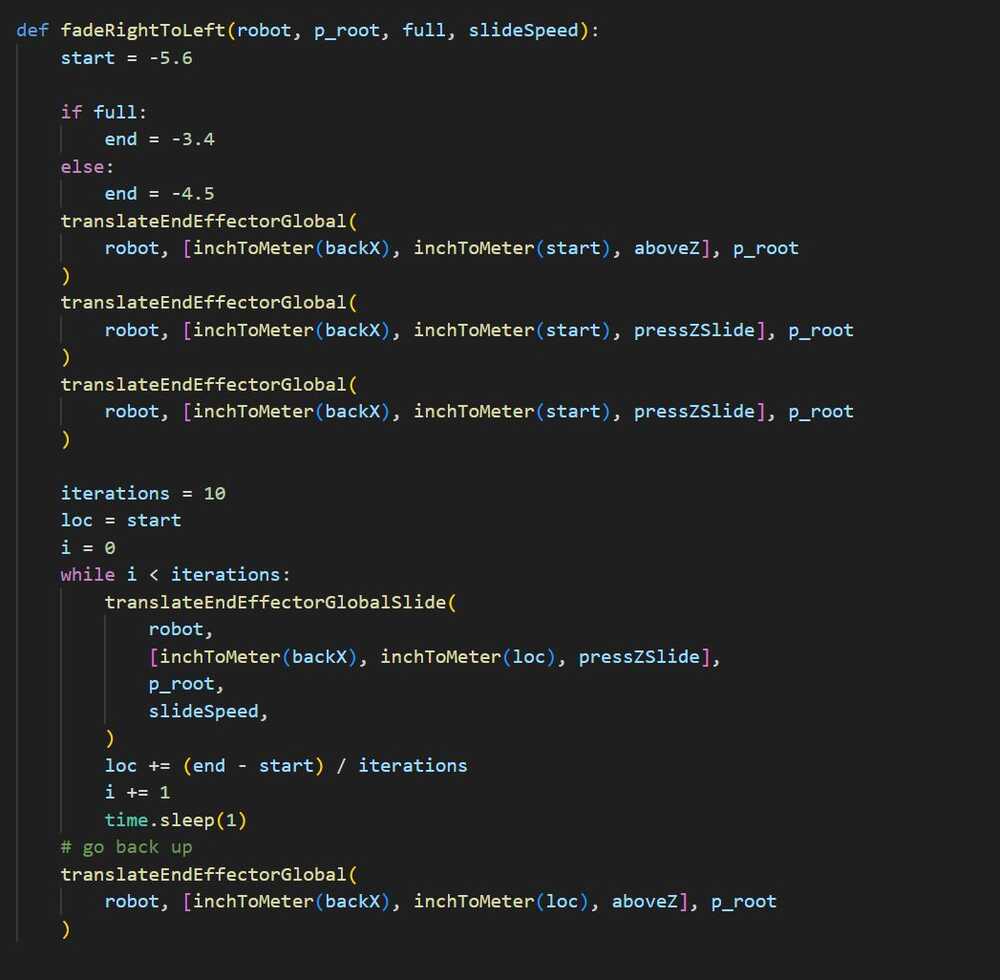
Figuring out the best speeds and distances to press buttons:
Figuring out the sliding mechanism:
Wrote so many functions!
Thanks to Alex for helping me out a ton!