Process ✏️
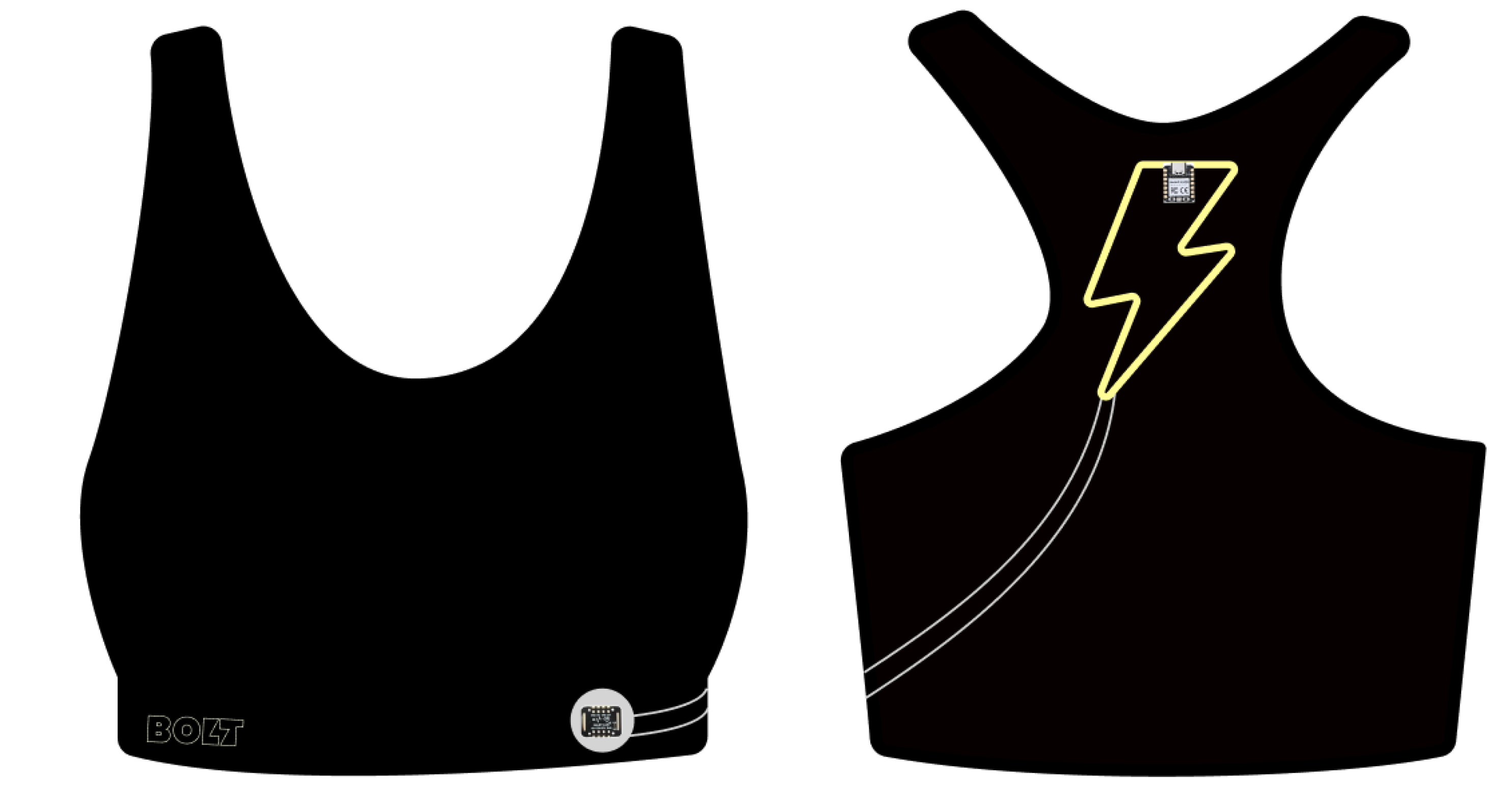
This was a big week. I've started to solidify my final project ideas of redesigning the sports bra sensor.
I am currently taking Physics of Sports at Harvard, and this project aligned with my data collection process.
Here is an update on my final project sketch. You can find more about it here: link to final project page!
1. Set up
For networking week, I am really taking steps towards my final project.
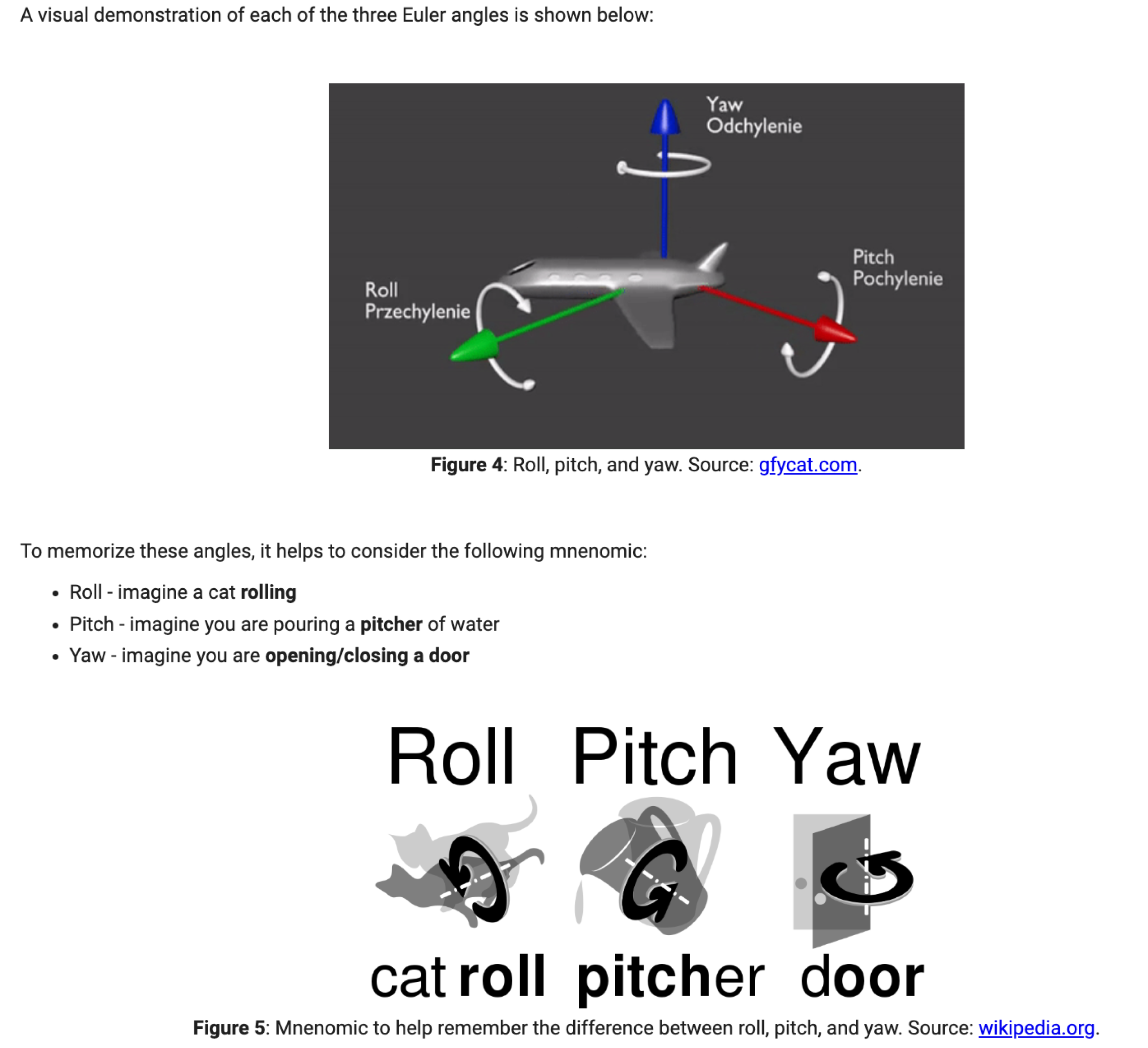
When unboxing an IMU (like the MPU-6050) there are a variety of things that one must know related to the 6-axis
of motion. As someone who is pretty new to working with sensors, That mean learning terms like roll, pitch, and
yaw to best understand how the orientation of the sensor impacts your data collection.
Helpful visual demonstration or Euler angles, and mnemonic decides to remember roll, pitch, and yaw:
Now that we have a basic understanding of physics, let’s build this!
I have used my Komotion sensor from Physics of Sports, as a reference.
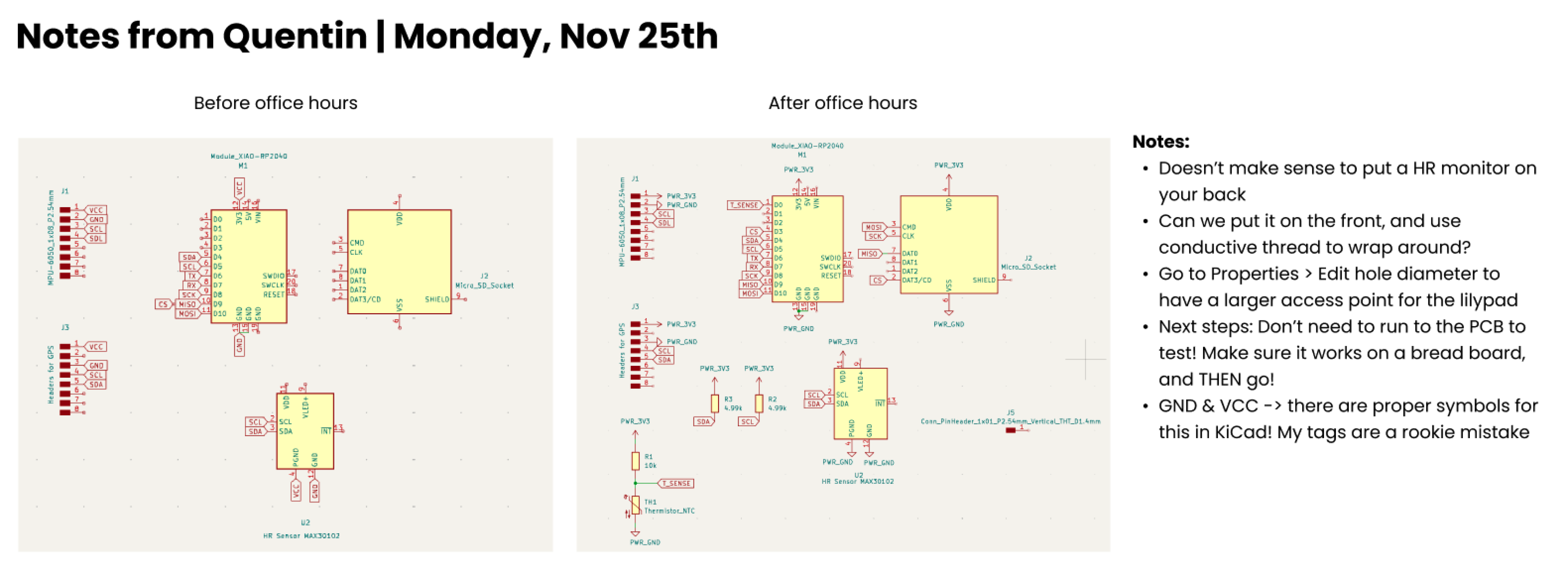
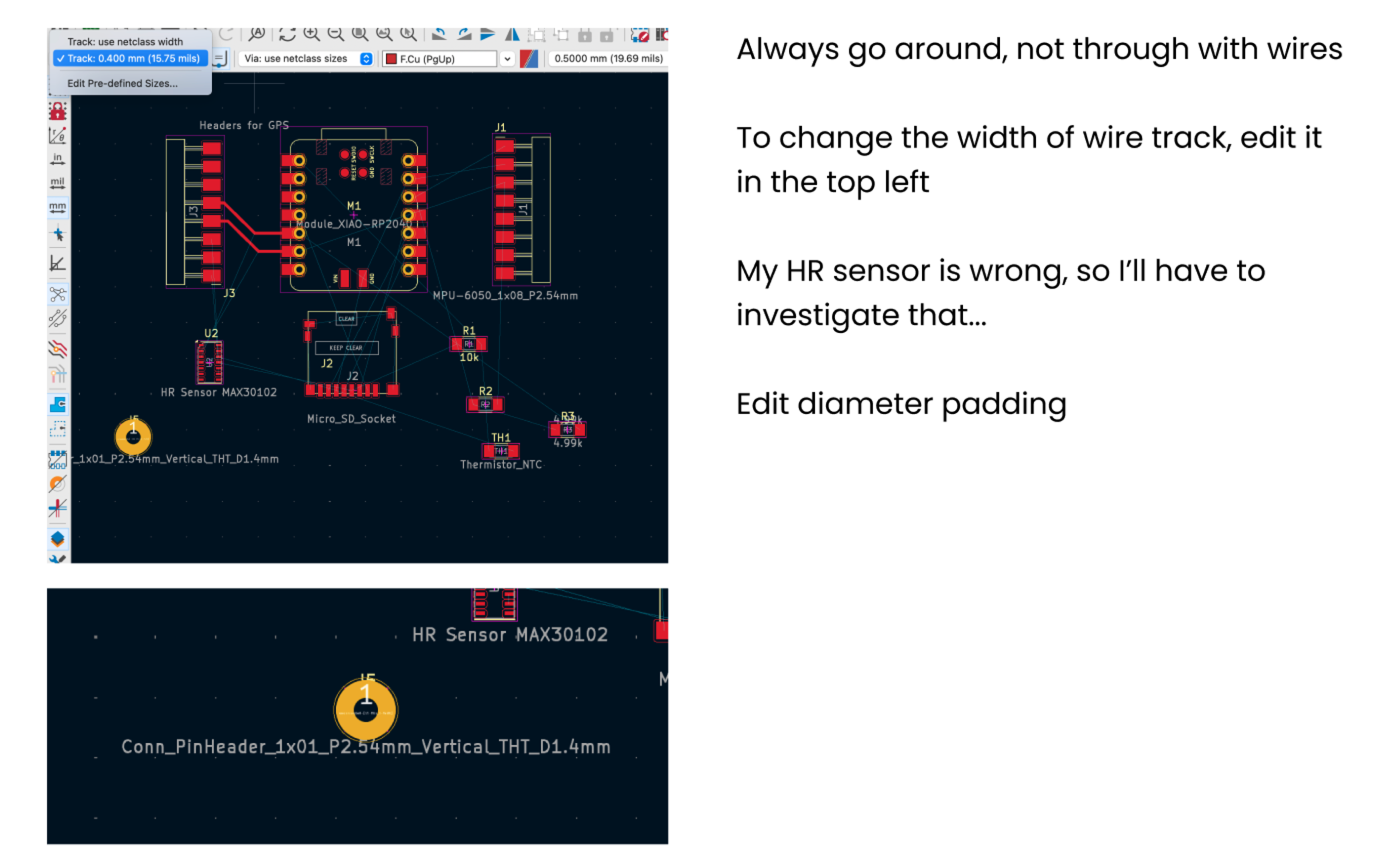
I've put a lot of work into my schematics, and this week kicad finally started to CLICK!
2. Test
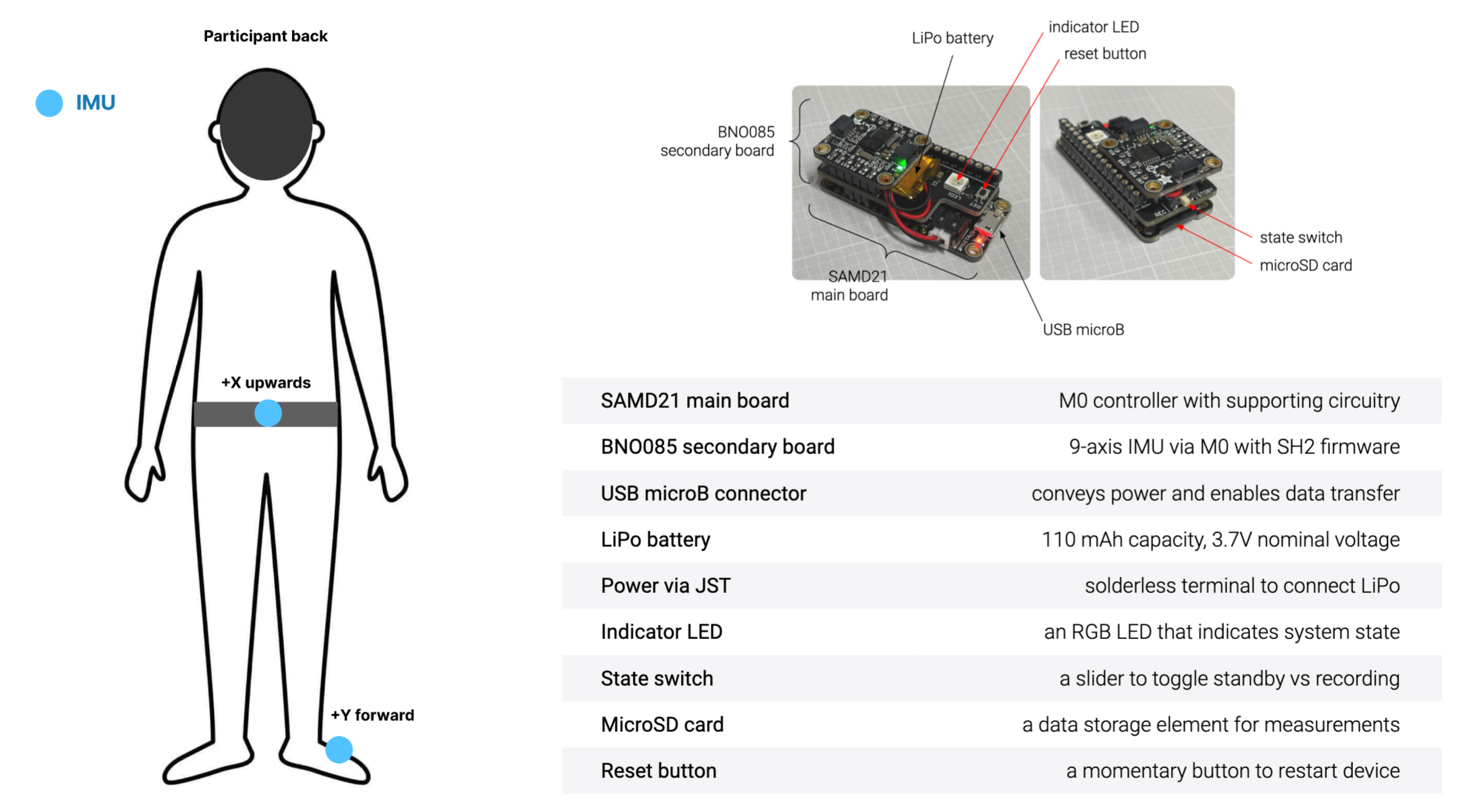
I uploaded my Arduiono code, calibrated my sensor, then went to the track to put this data
collection to the test. I attached one sensor to my shoe and one on my back to ensure the data was aligned.

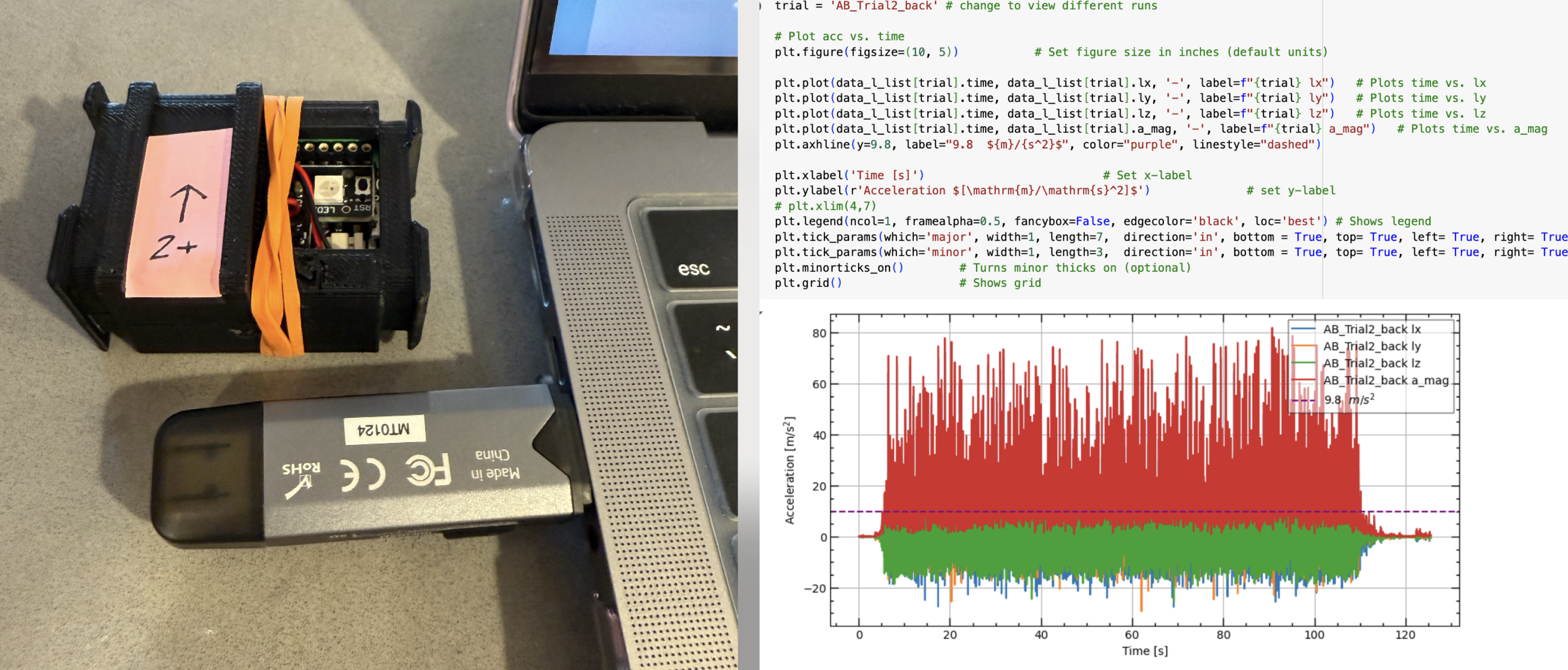
3. Data export
I used a python script in Google Collab to identify the acceleration from my sensor.
It is very messy, and this is definitely something I’m working to dive into in the following weeks.