
References
&
Resources


For our computer-aided design assignment, we were asked to develop an initial model of our final project. In my case, I focussed on designing my assembly robot. I envisioned a robot capable of gripping material, lifting it, and walking with it to a new position, primarily inspired by spiders and pre-existing multi-legged robots.

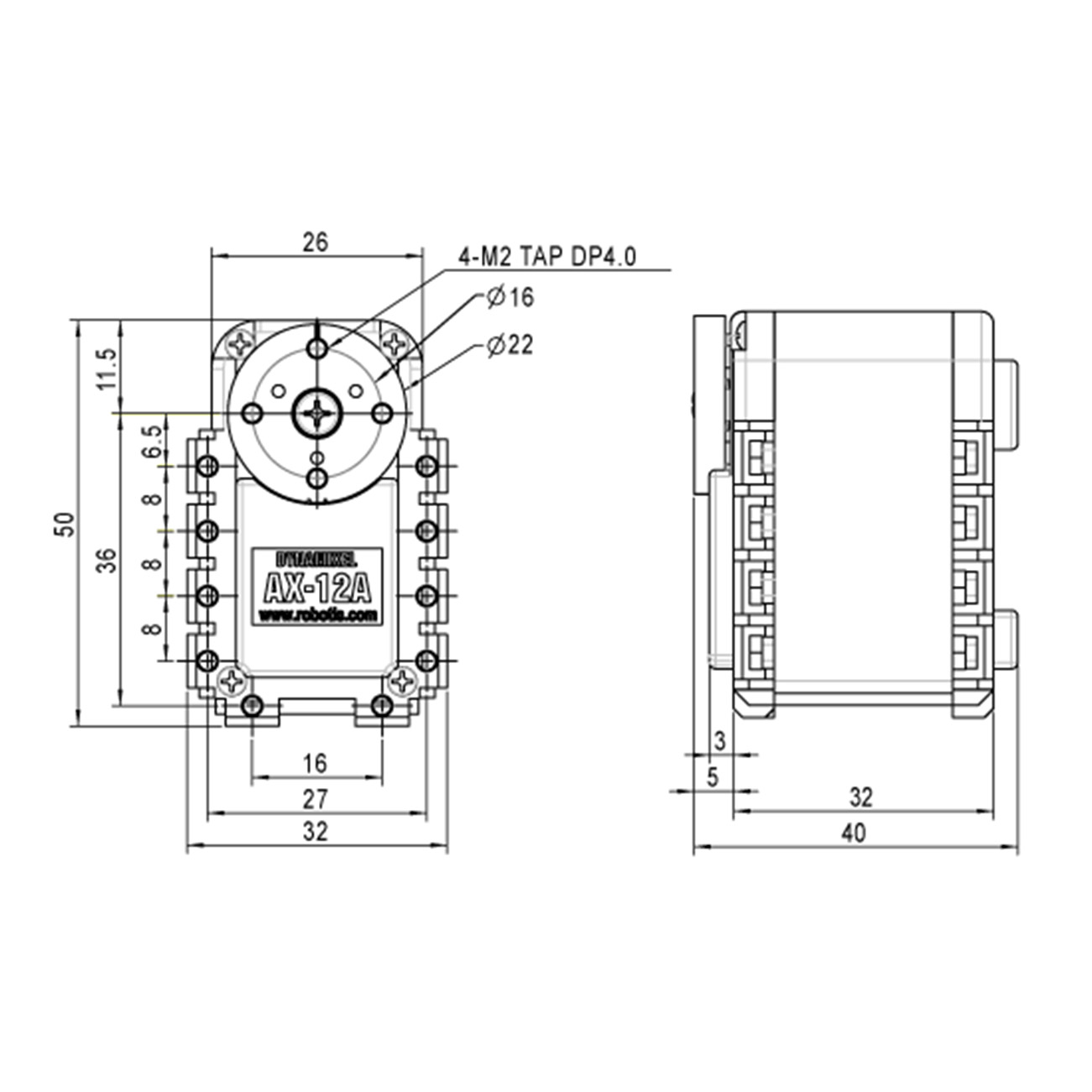
Crucial to my design was understanding the AX-A12A servo motors by Robotis. They have specific dimensions and specs, all of which can be checked online in their e manual. But, perhaps the most important step, was to download 3d models for both the motors themselves, and for some components already designed to interface with them. My components would need to follow the same logic./p>
CAD
Eventually, my design was that of a quadrapod robot with 3 degrees of angular freedom in each leg. I did not design it parametrically, as there was perhaps too much trial and error exploration in rhino and grasshopper, as powerful as it is, only helped in specific processes.
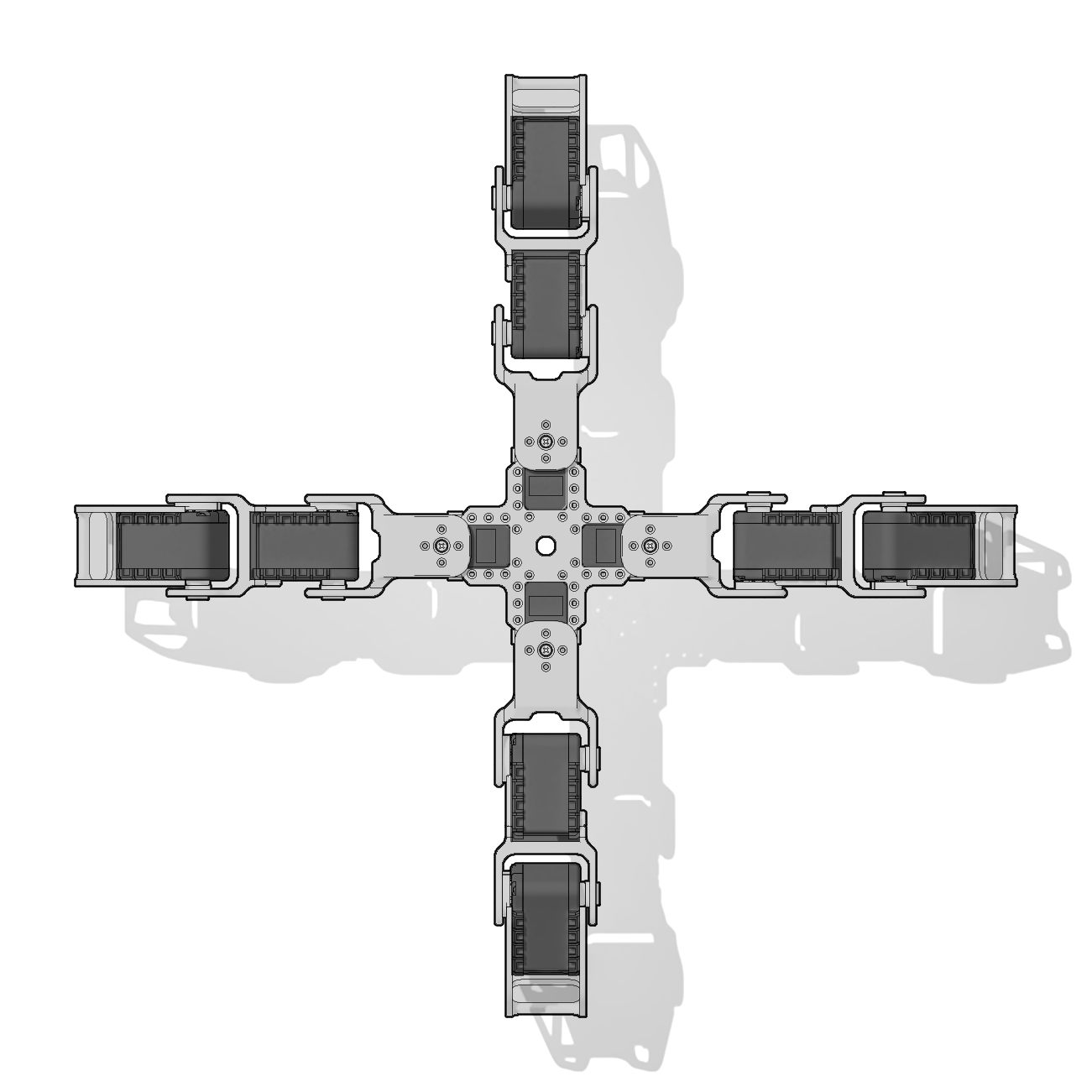
I organized the design with blocks and with a clear layer structure, nesting the pieces of each limb inside each other: leg > rigid body 1 > rigd body 2 > rigid body 3. This helped me quickly test the movement of he robot by rotating the pieces relative to their 'father' geometry.
I know this model will not be final, but, once I have a working prototype, I will send it to Unity and I will set up a digital twin simulator. There I will be able to conrol the robot, simulate complex behavior and perform reinforcement learning.
