Spiral Learning Log 1102
Please refer to final 1.0 for the first iteration of my final project idea
CONCENTRATION PHONE CASE
a phone case that runs away
inspirations


The CONCENTRATION PHONE CASE will:
1. move away when you try to reach for it
2. be activatable/deactivatable for certain periods
3. turn away upon hitting a wall
4. sound an alarm to help locate it when needed
some initial designs



Spiral Learning Log 1122
i made a second attempt at the input device assignment while working on the final project. Since my final project requires distance sensing, I tested the VL53L1X Time-of-Flight (ToF) distance sensor
This sensor provides fast and accurate ranging up to 4 meters. It operates by measuring the time of flight of invisible, eye-safe laser pulses to determine absolute distances, regardless of ambient lighting conditions or target characteristics such as color, shape, or texture (though these factors can affect the maximum range).
to better understand the sensor, I followed an online tutorial
first i tested on a bread board
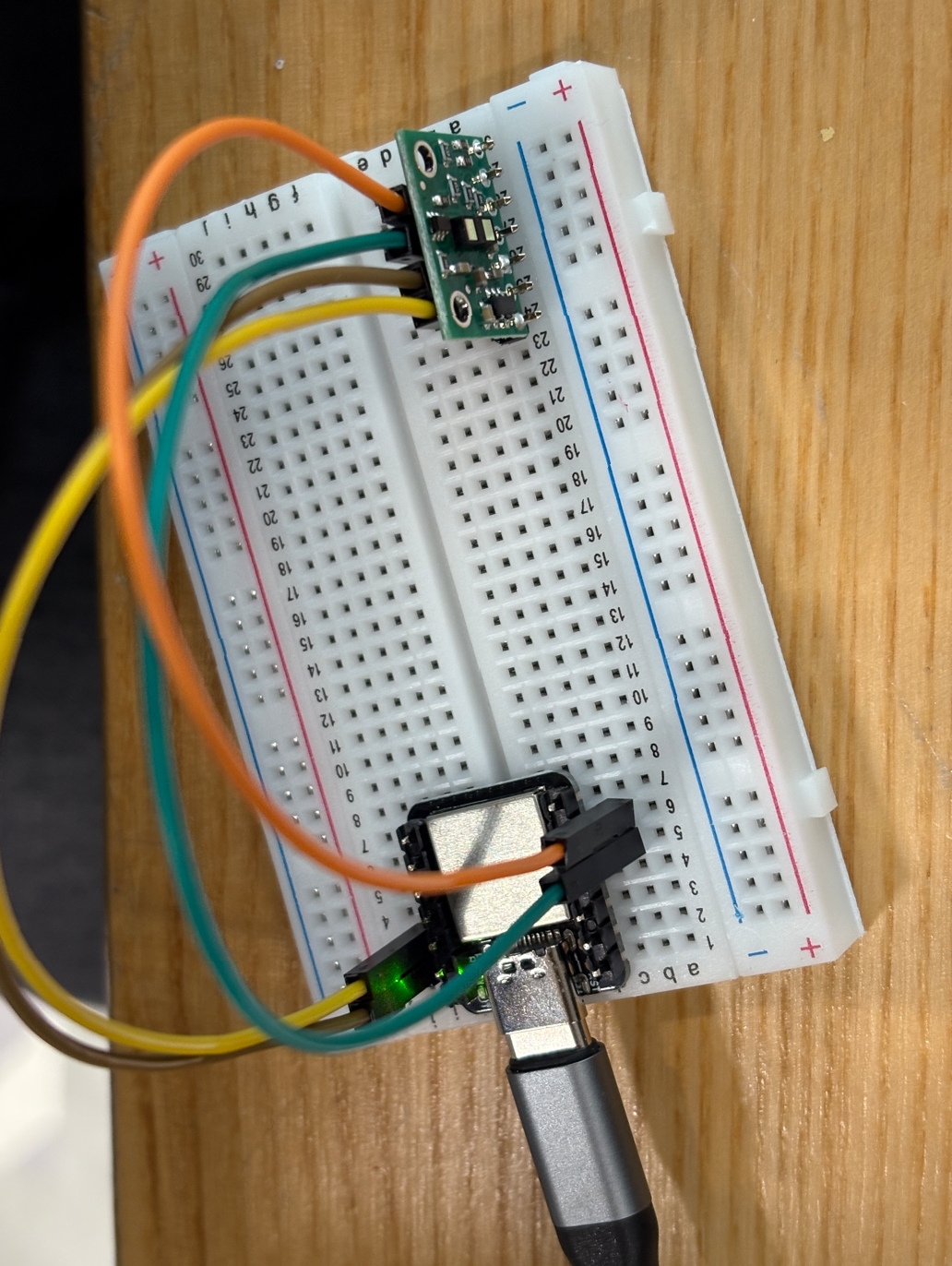
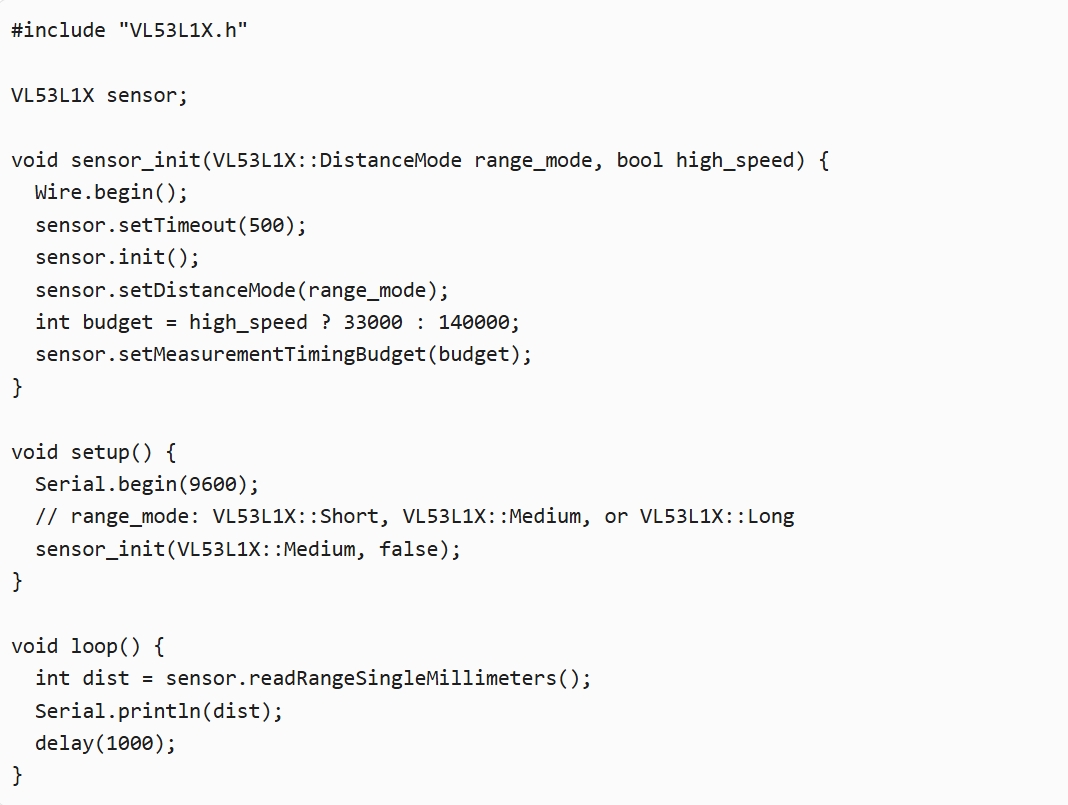
it worked well, the serial monitor started showing various numbers as i pointed the sensor towards different objects
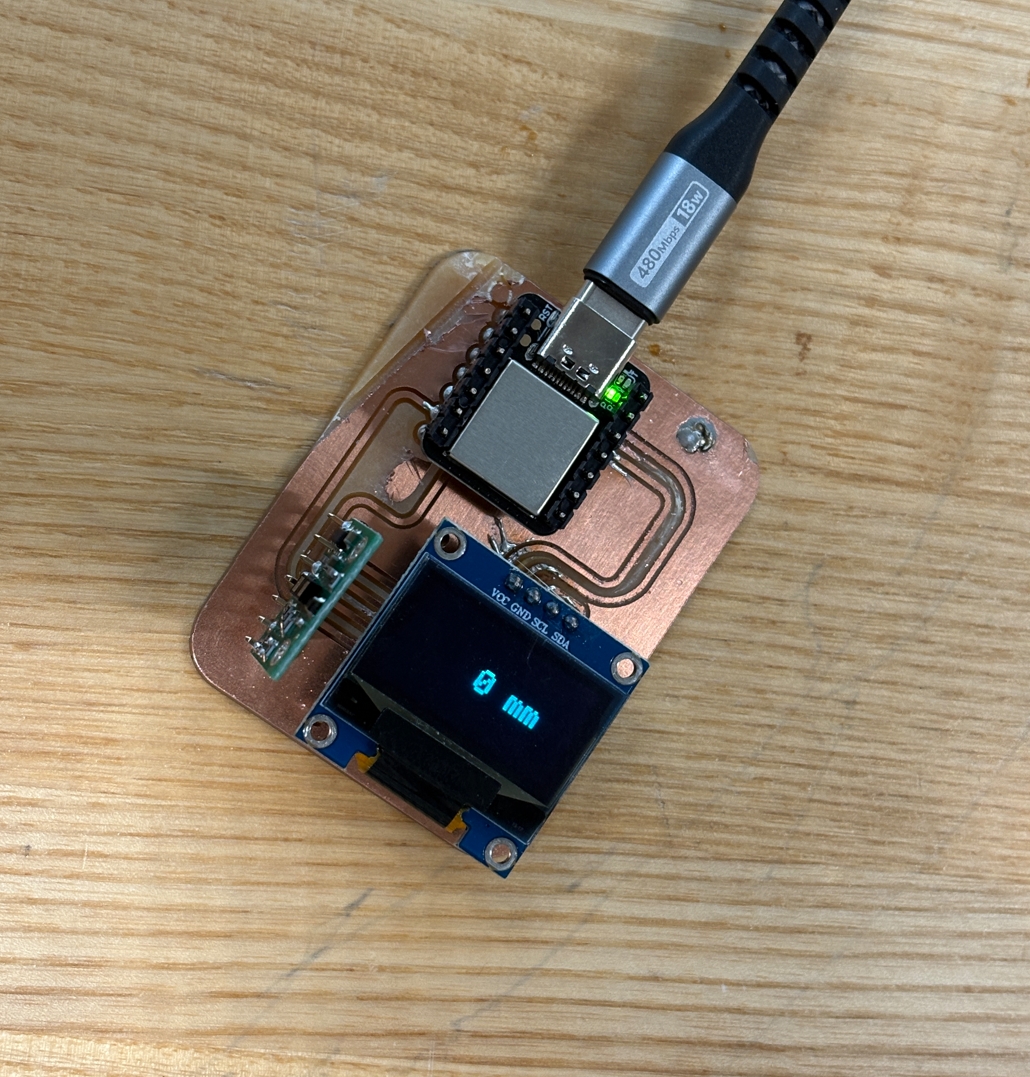
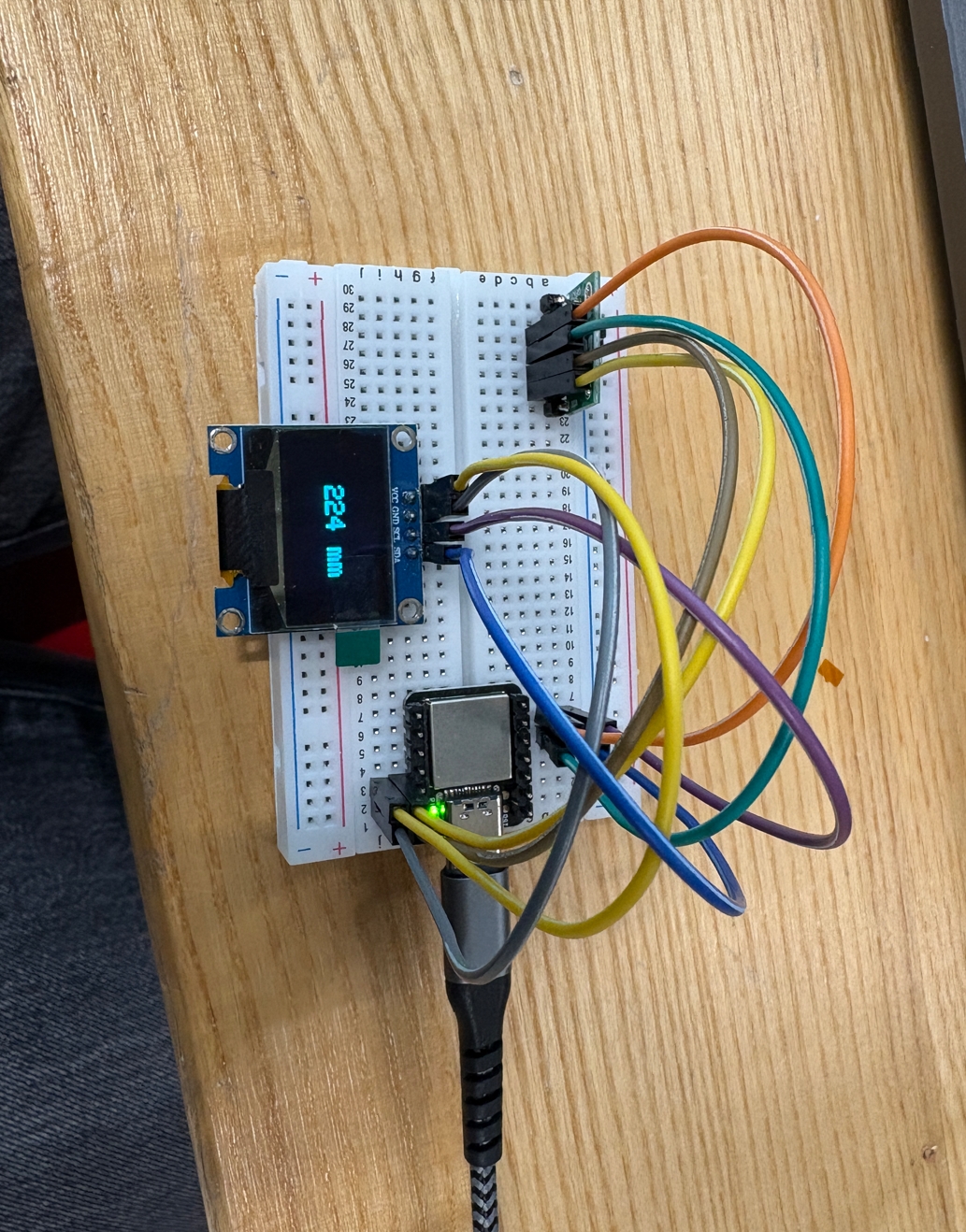
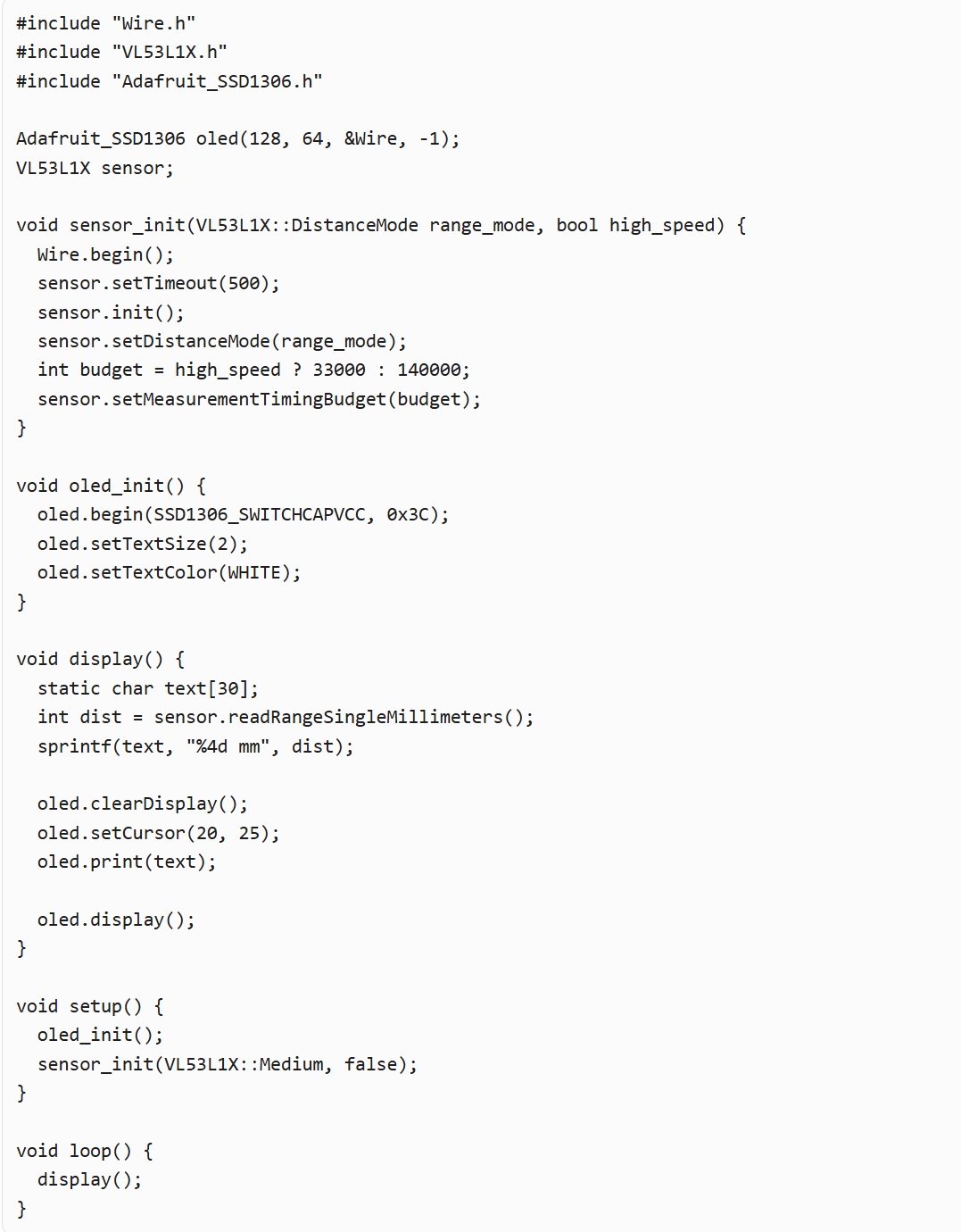
then i added an oled
then i made a PCB, again, which i will do it everytime i mill my PCB, shoutout to TA LEO's bitrunner
however, i think my soldering was off, the OLED turned on but the TOF sensor was not working properly :(
Spiral Learning Log 1126
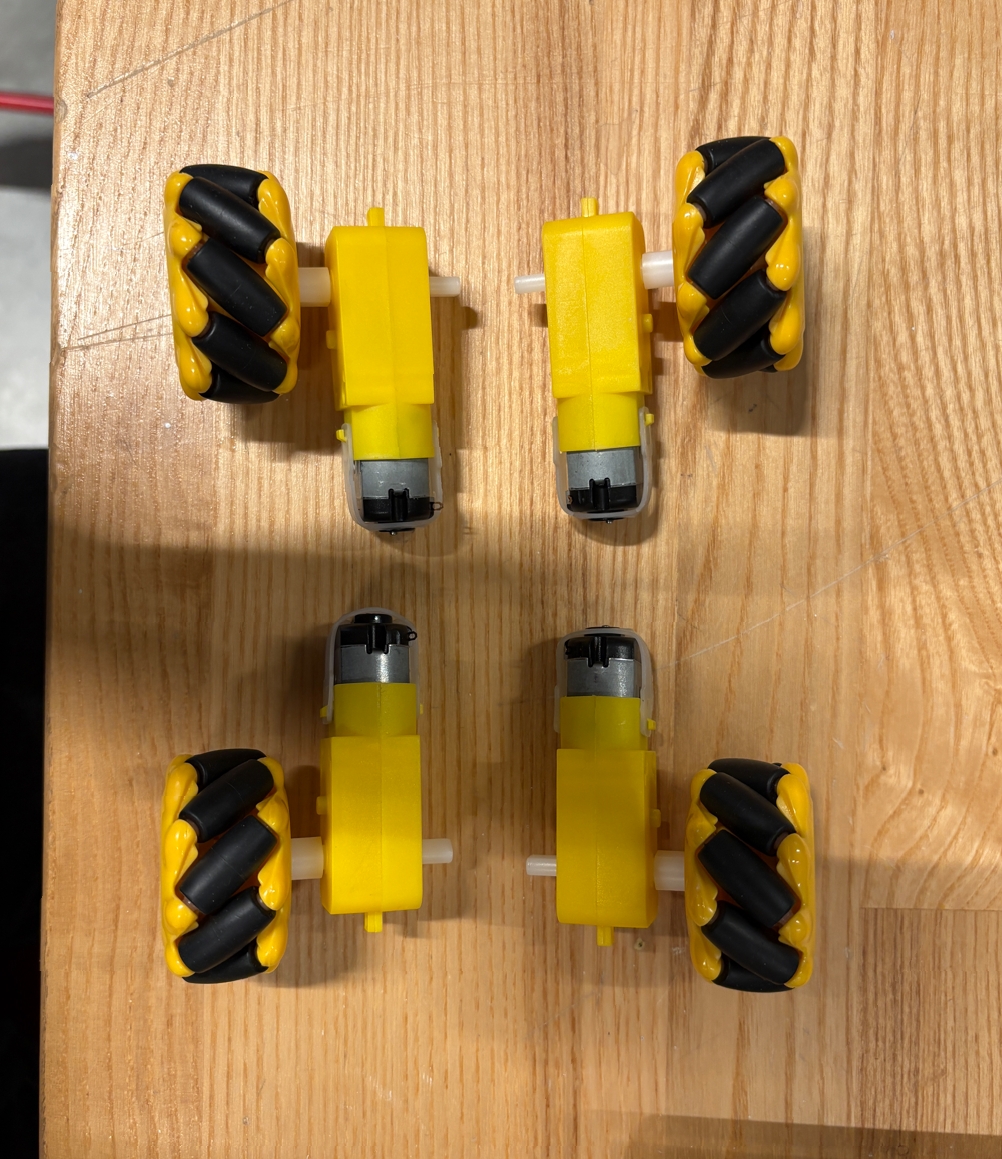
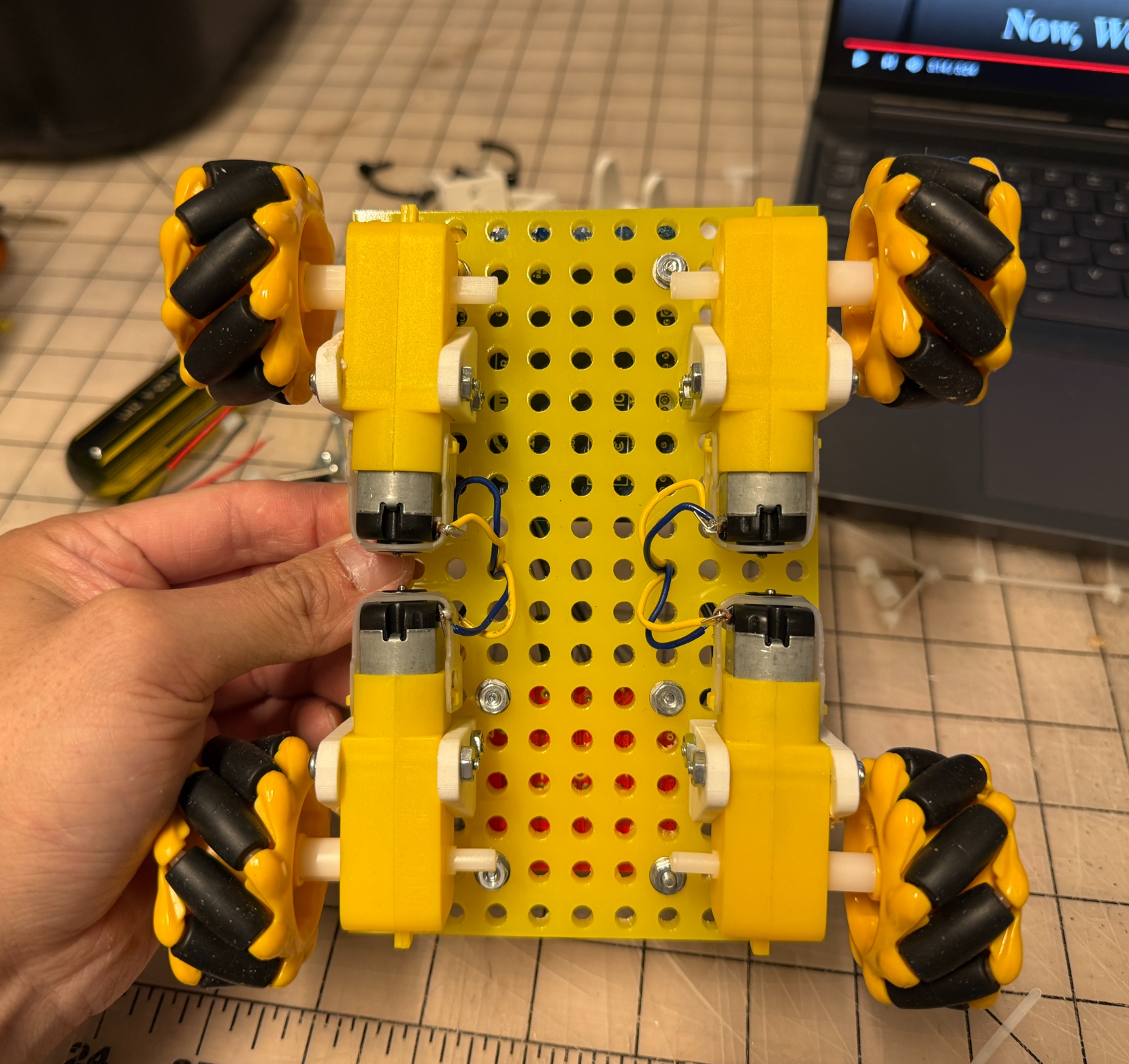
i started working on one of the most important systems of the project—the motors and wheels. TA Leo suggested using Omni-wheels, so i followed an online tutorial to understand how the motors and wheels work. I began with an Arduino board, as it is easier to get started with. I plan to transition to the RP2040 PICO W for further development



Spiral Learning Log 1130
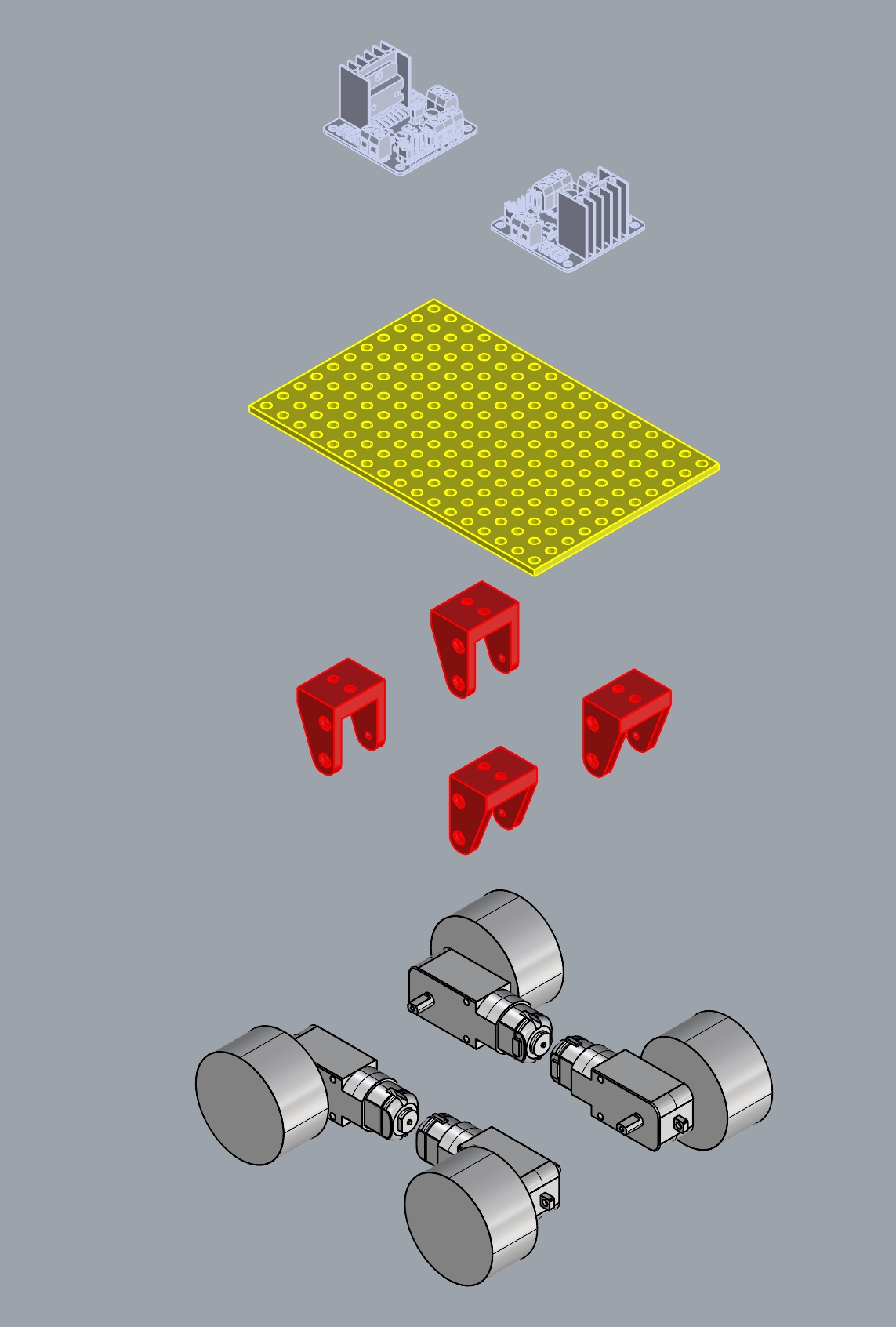
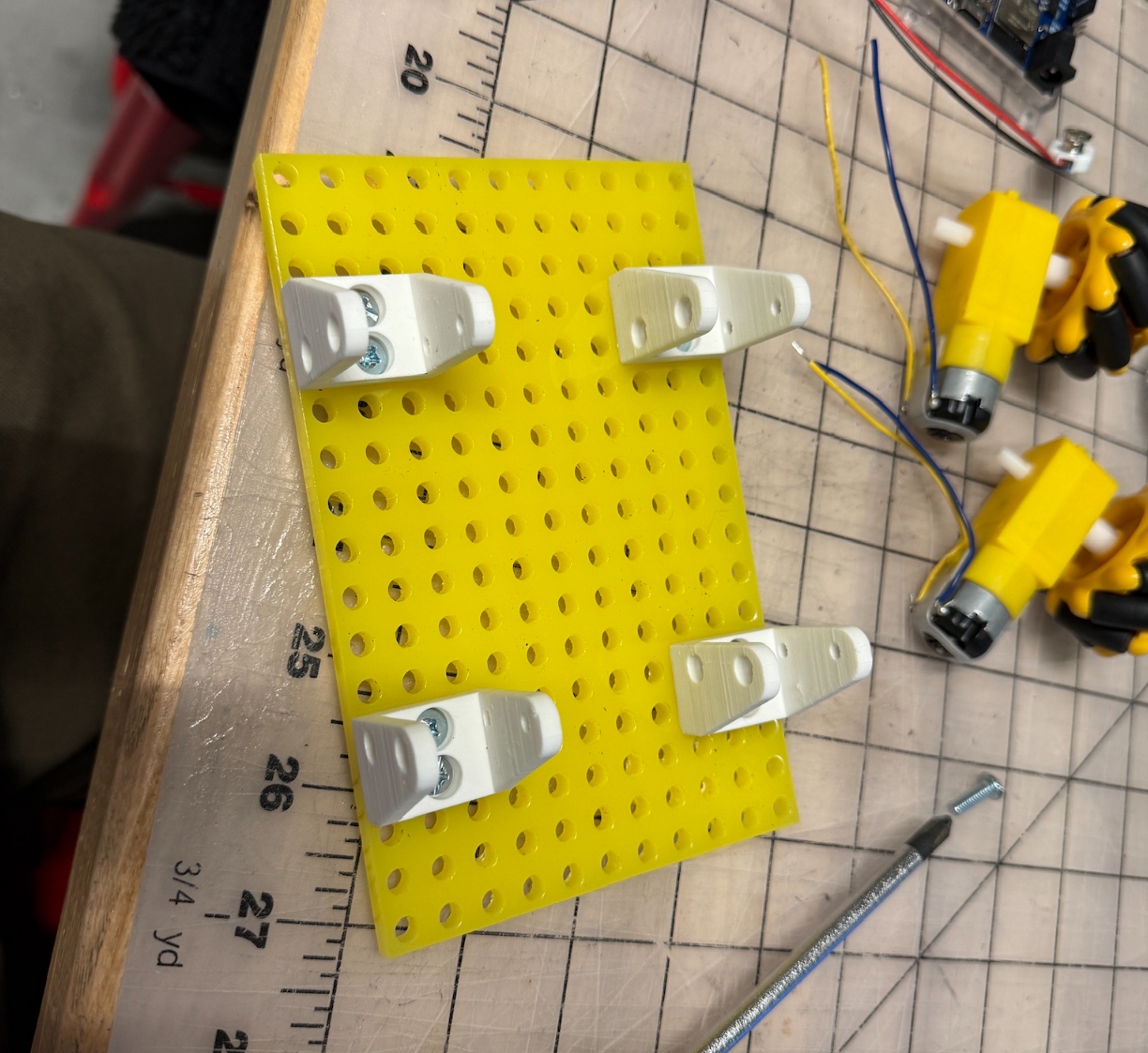
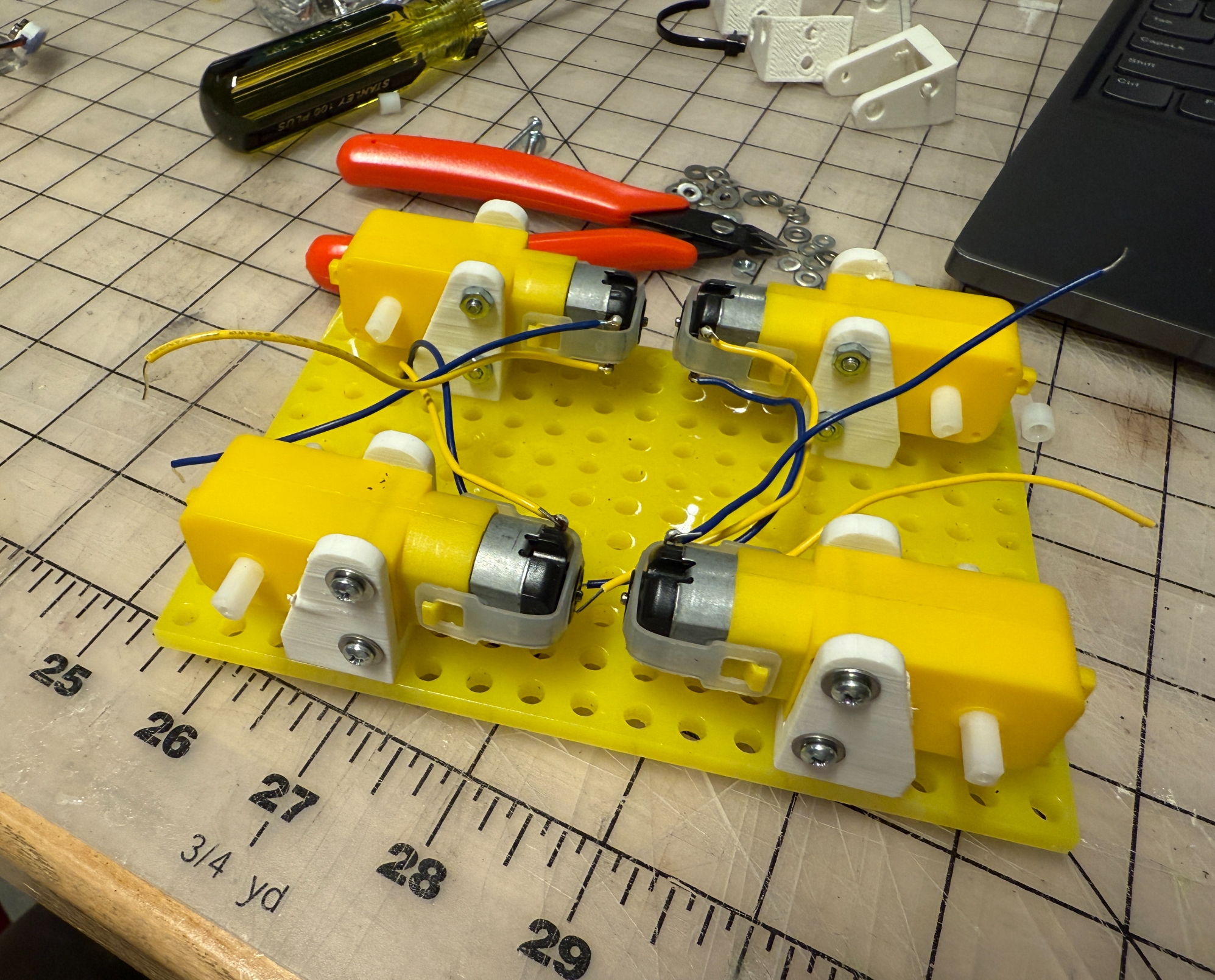
lasercut the bed and 3d printed the frames for motors
inspired by the end effector we designed during Machine Week, i created a platform to hold motors and designed frames to secure them. the platform is lasercut and frames are 3d printed. the spacing between the holes is tailored to fit the screw holes of the motor driver
Spiral Learning Log 1203
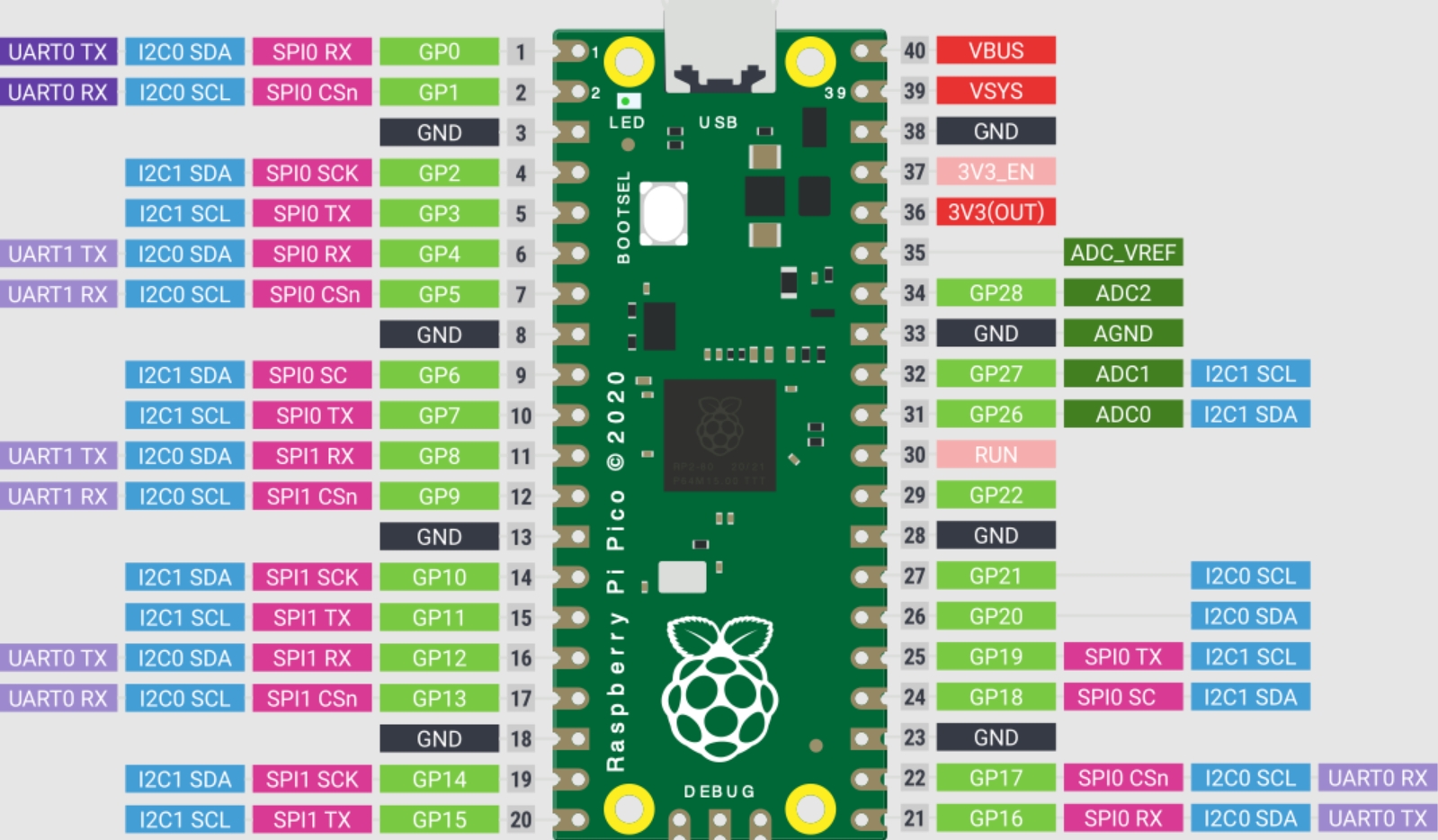
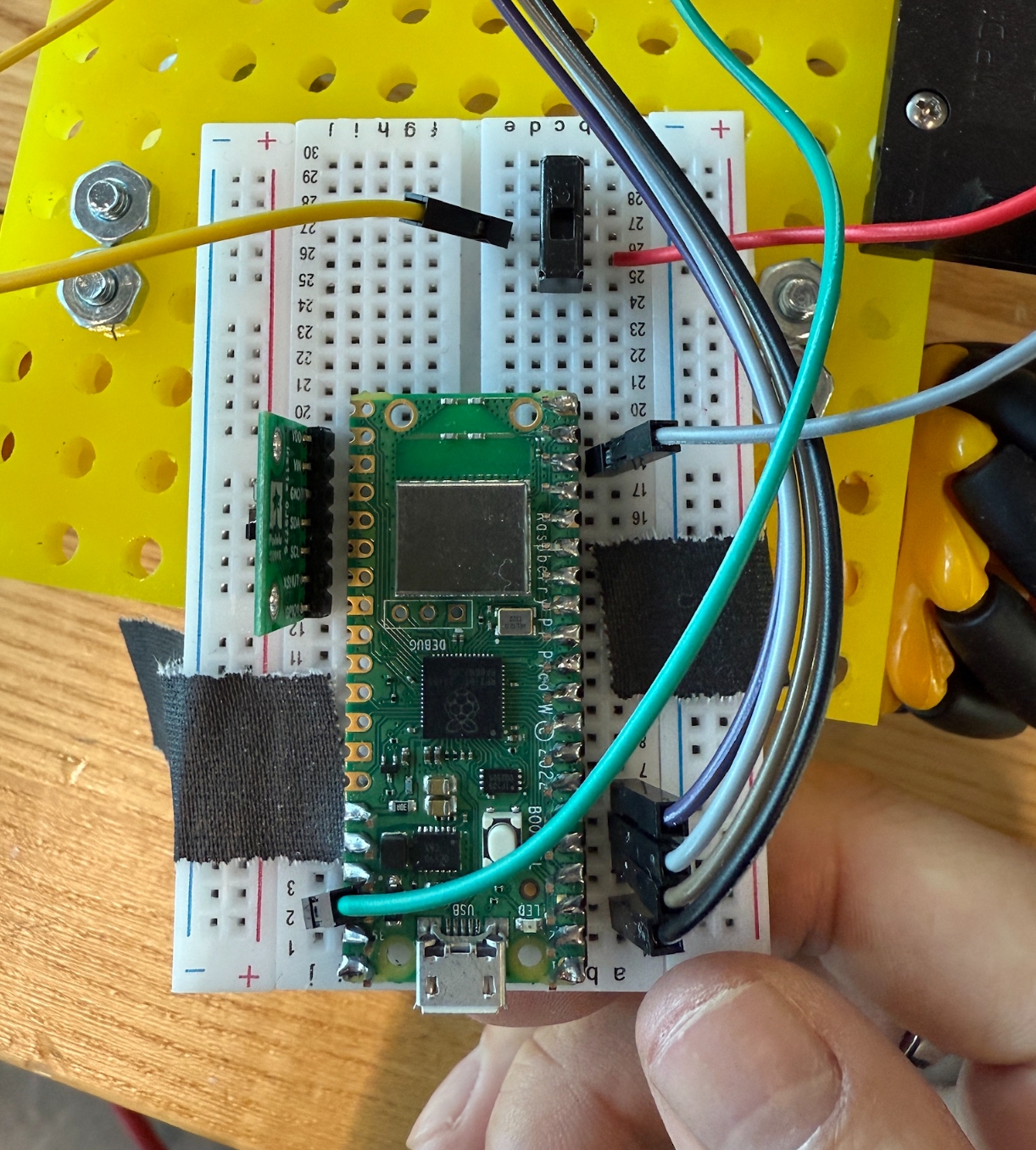
move from Arduino UNO to Raspberry Pi Pico
today's mission is to transition from Arduino Uno to Raspberry Pi Pico W. i chose the Pi Pico over the xiao due to its greater number of pins. i plan to connect at least six sensors, one on each side of the phone, which requires at least eight pins
Spiral Learning Log 1204
test the connection between time of flight and Raspberry Pi Pico
today i had some trouble connecting pico to the time of flight sensor; they refuse to talk to each other. an online forum indicated that the specific brand of time of flight sensor that reef offers, the pololu vl53l8cx, does not have a compatible library with pico. it was a bit frustrating, but i decided to switch to the hc-sr04 ultrasonic sonar. i like its look; the two sensors resemble eyes, giving the sensor a bit of a human character. although it is not as efficient as the time of flight sensor, it might make the project more interesting.the datasheet of hc-sr04 does not seem like to require I2C connection which gives the pins more flexibility


Spiral Learning Log 1206
schedule for next a couple of days:
1211 - connect hc-sr04 ultrasonic sensor with Pico
1213 - test out 2 motor drivers for omni wheel, program the omni wheel system
1214 - integrate the ultrasonic sensor with with the omni wheels
1215 - test multiple sensors, finialize the system
1216 - case, box, assembly
Spiral Learning Log 1211
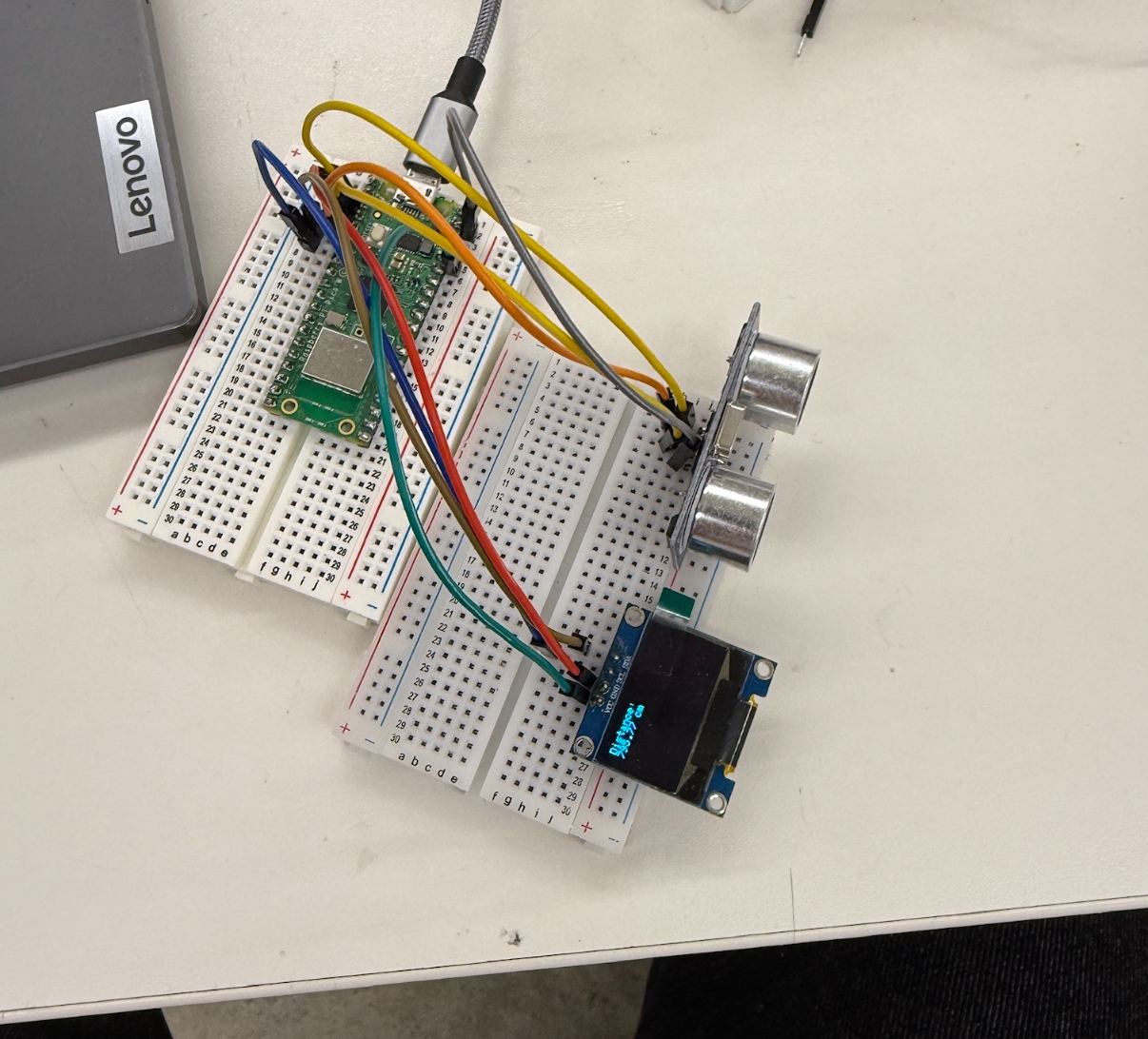
connect hc-sr04 ultrasonic sensor with Pico
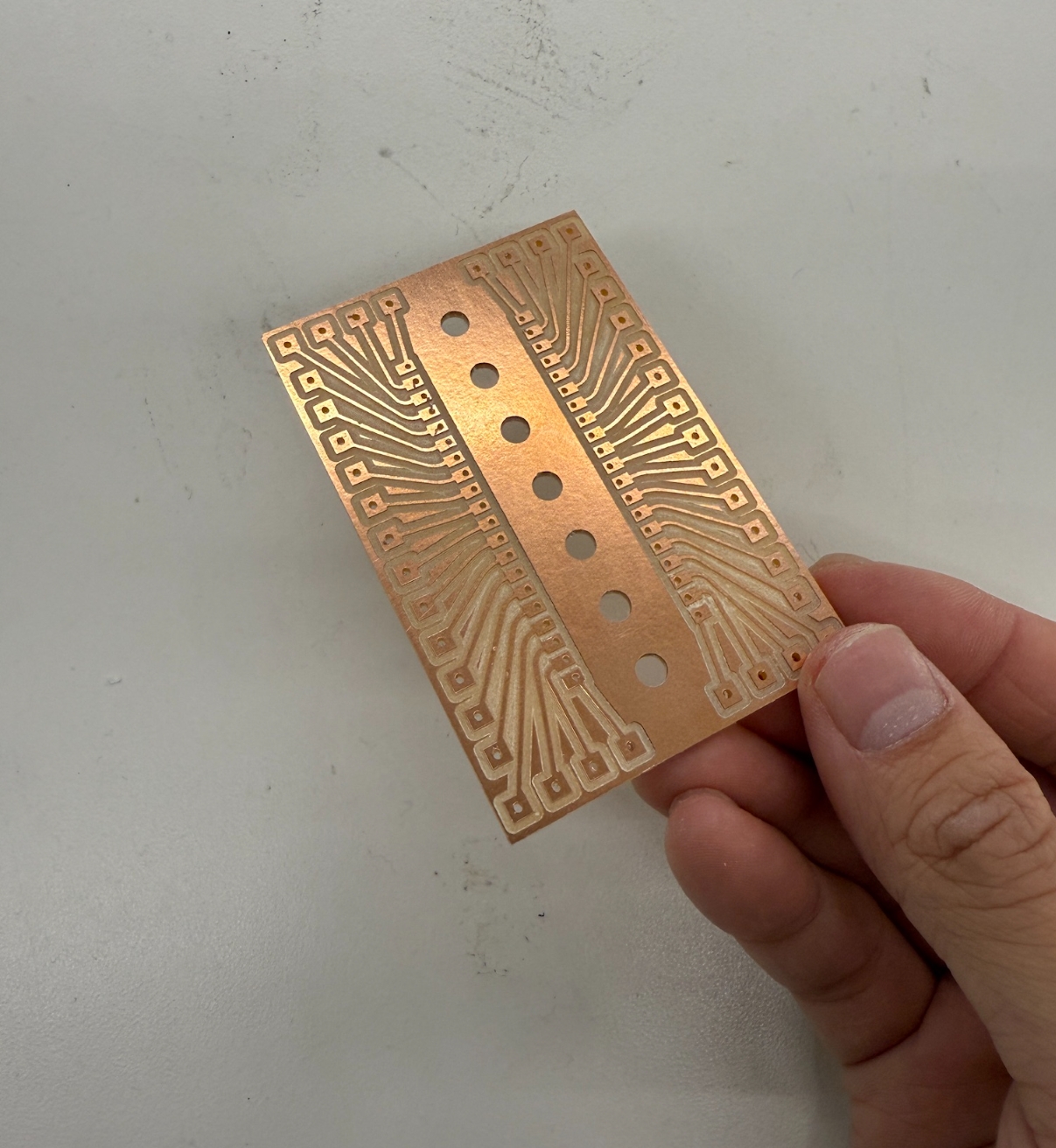
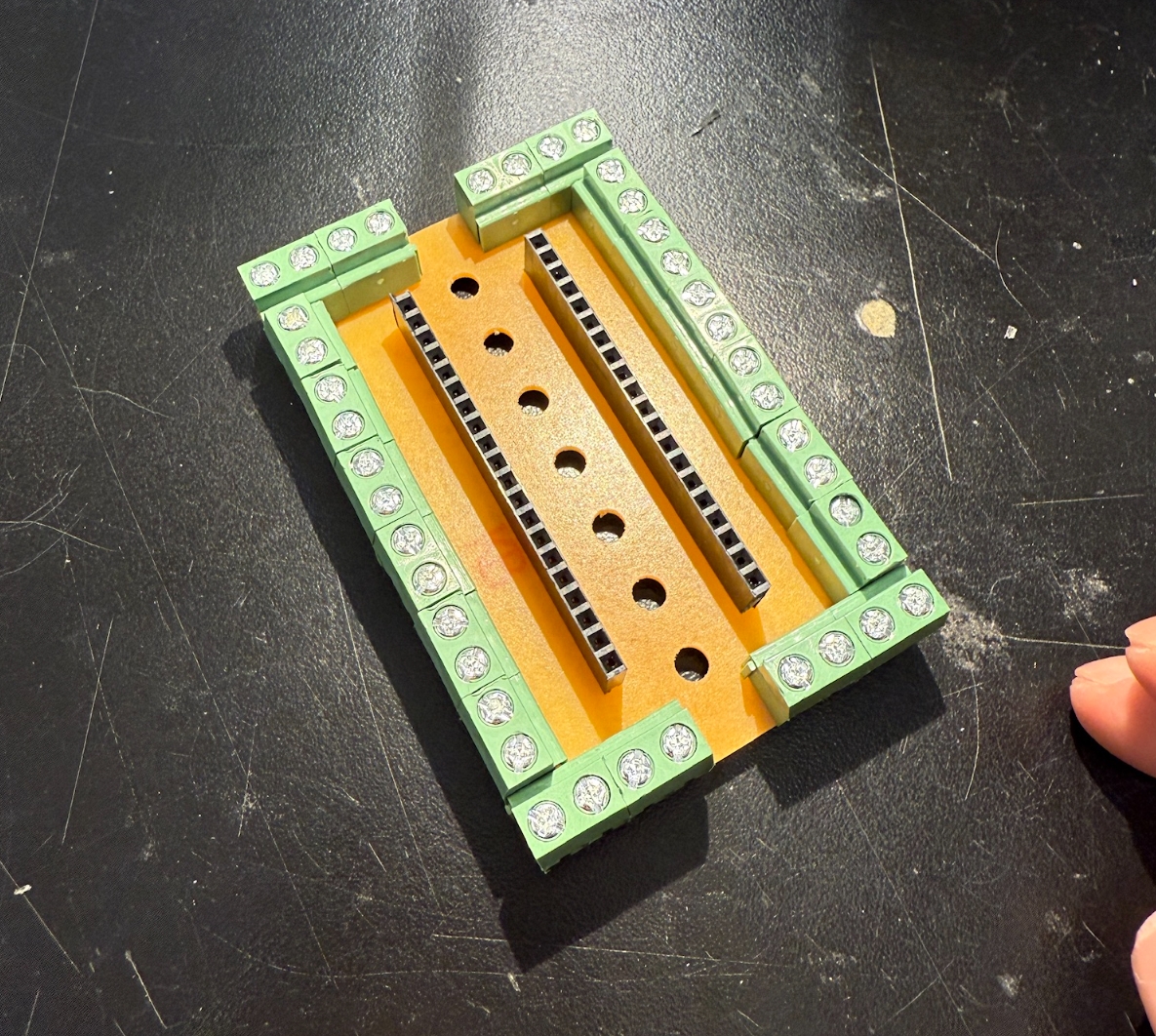
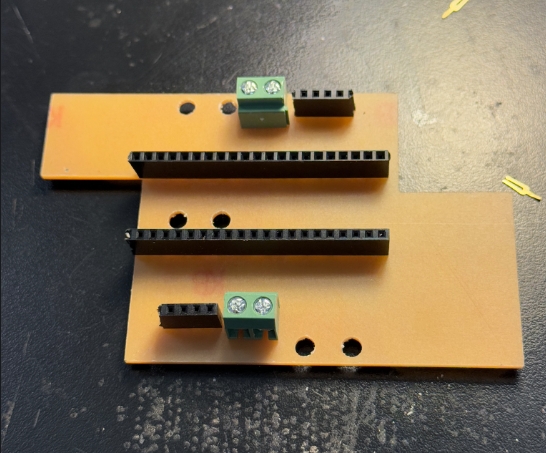
to start the day, i made a central board for the board, planning to make breakout boards for the sensors and connect them to the central board through screw-down terminals. i drew the board in rhino
following an online tutorial, i successfully connect the hc-sr04 with Pico, it feels good :)
Spiral Learning Log 1213
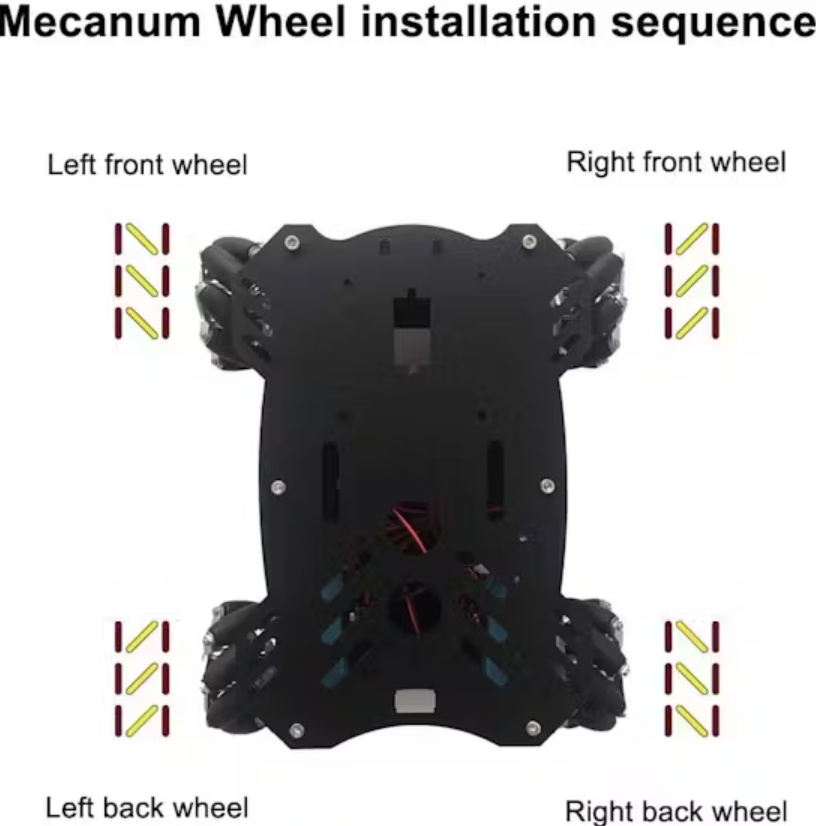
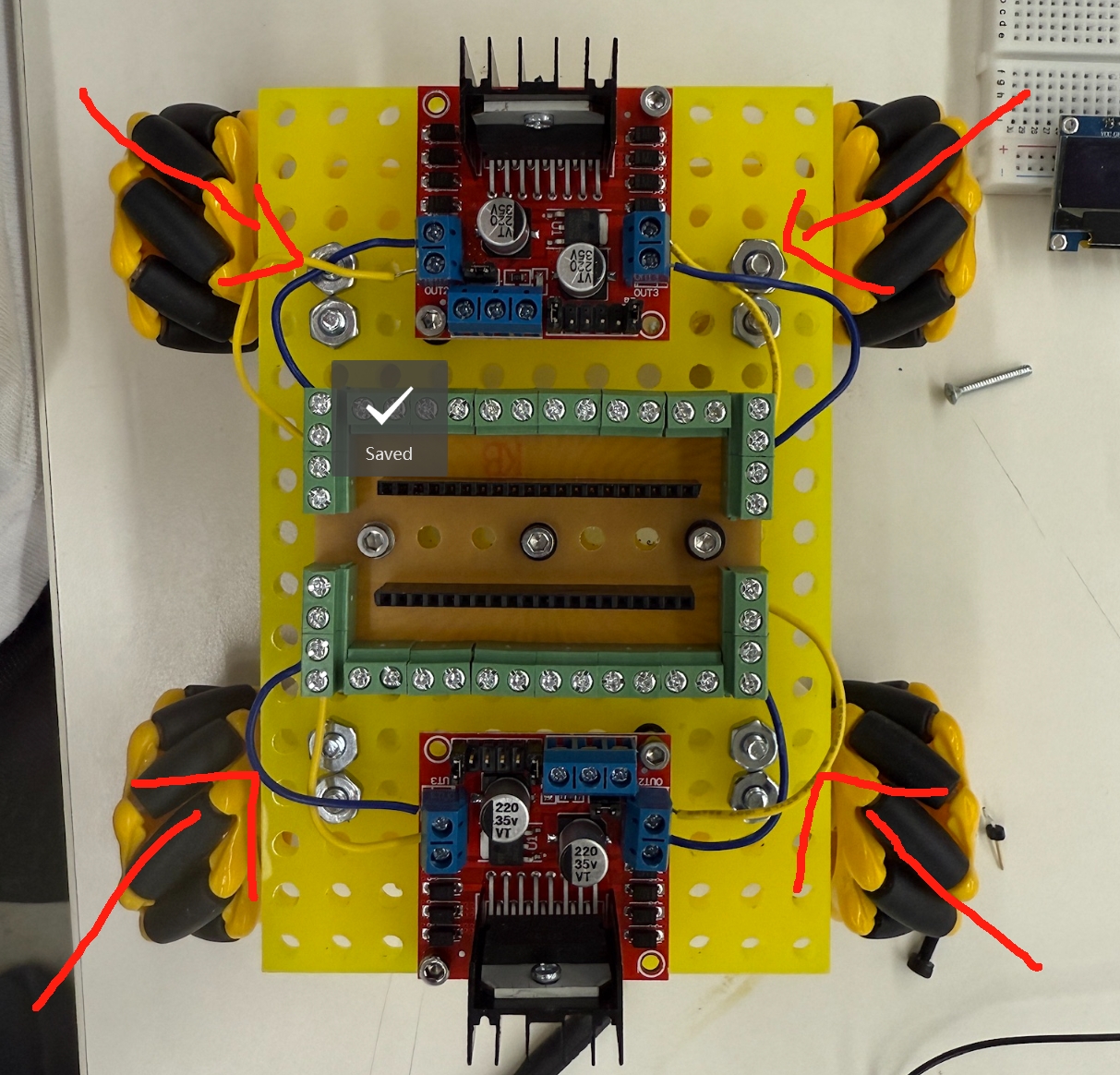
program the omni wheels
following an online tutorial, i learned about the omni-directional wheel system, and successfully programmed the omniwheel system
Spiral Learning Log 1214
integrate the ultrasonic sensor with with the omni wheels
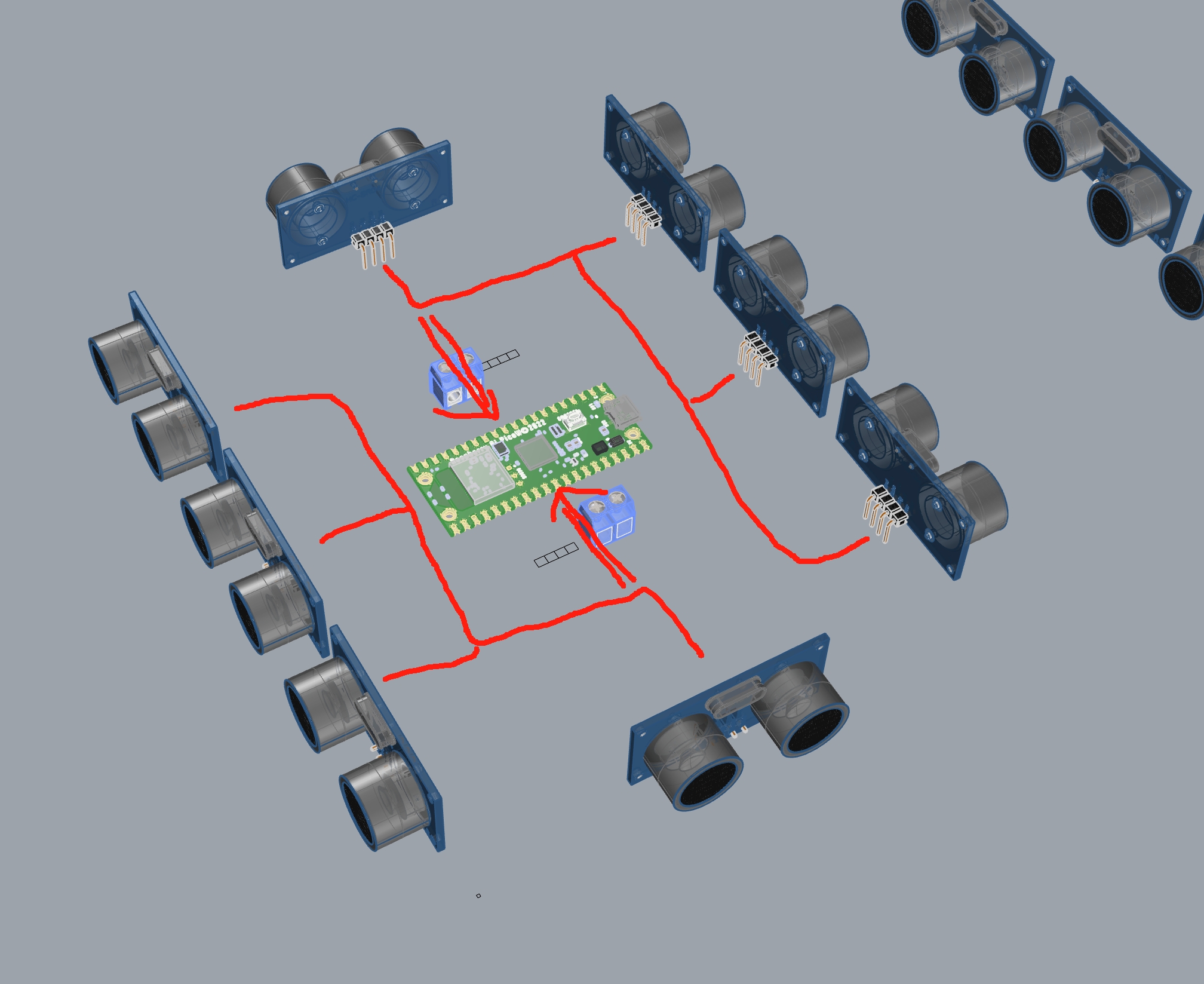
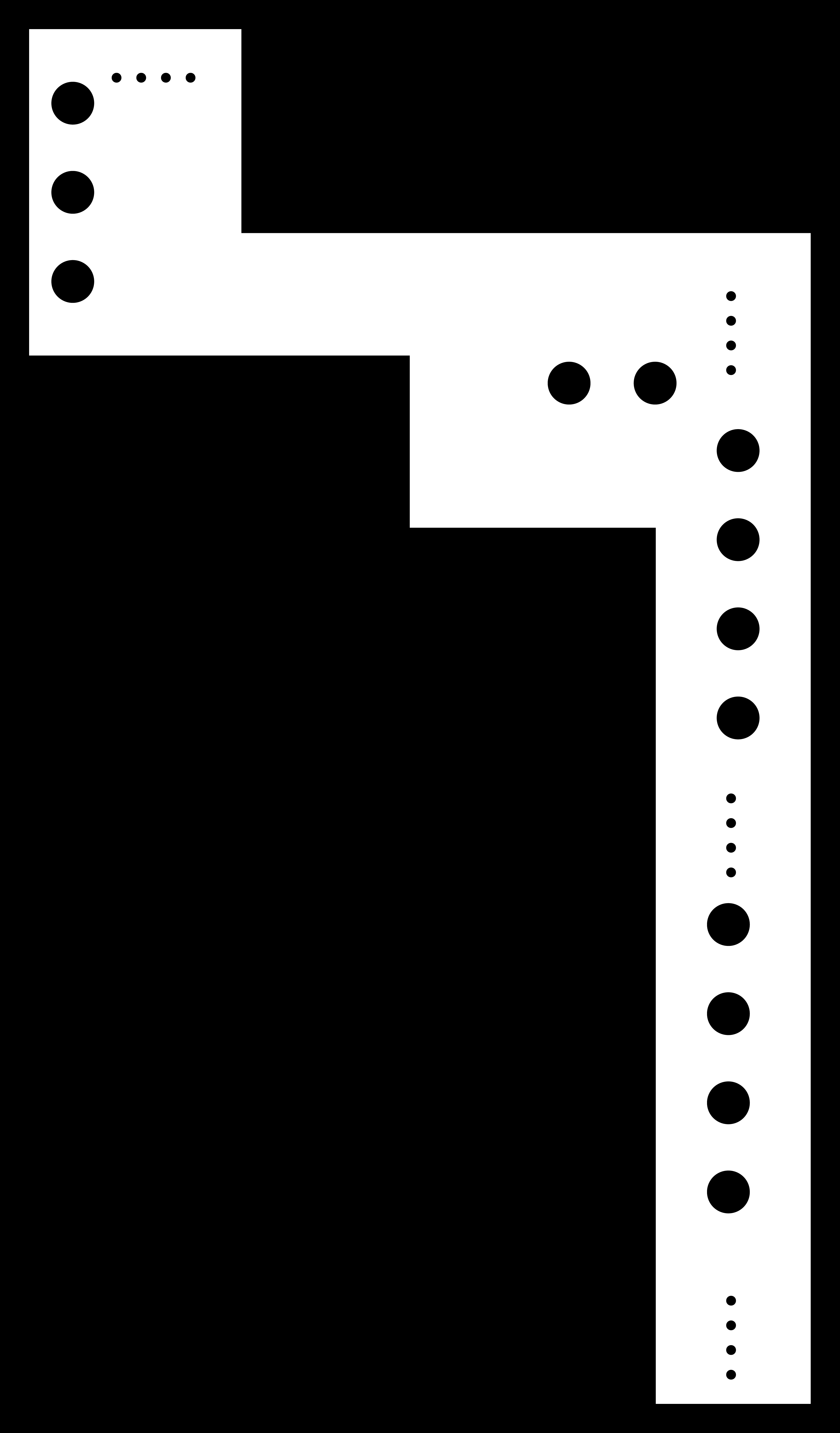
as i continue designing the system, i decided to use 8 sensors,3 on the long side and 1 on the short side
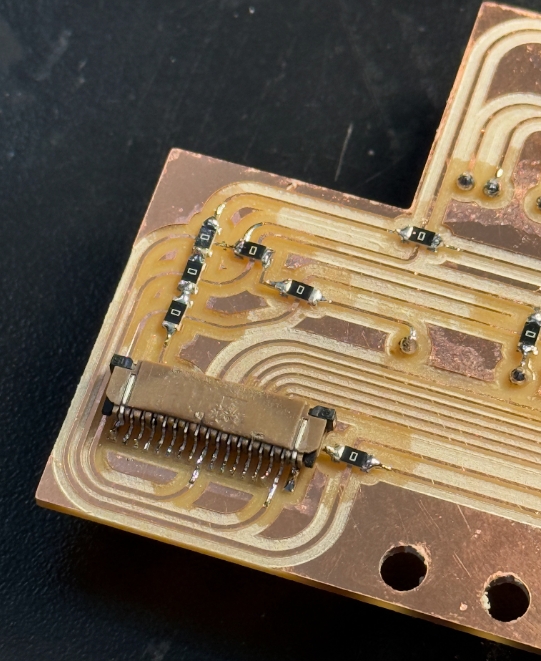
i found a bag of FPC connection cables and connectors in the free recycle corner at the design school, i decided to incorperate it into my project. 4 sensors will be grouped, which will connect to the center board with FPC cables

the FPC connectors in the bag are Adafruit breakout boards, i used heat gun to melt the connectors from the board

first i put one sensor on the board to test out the system
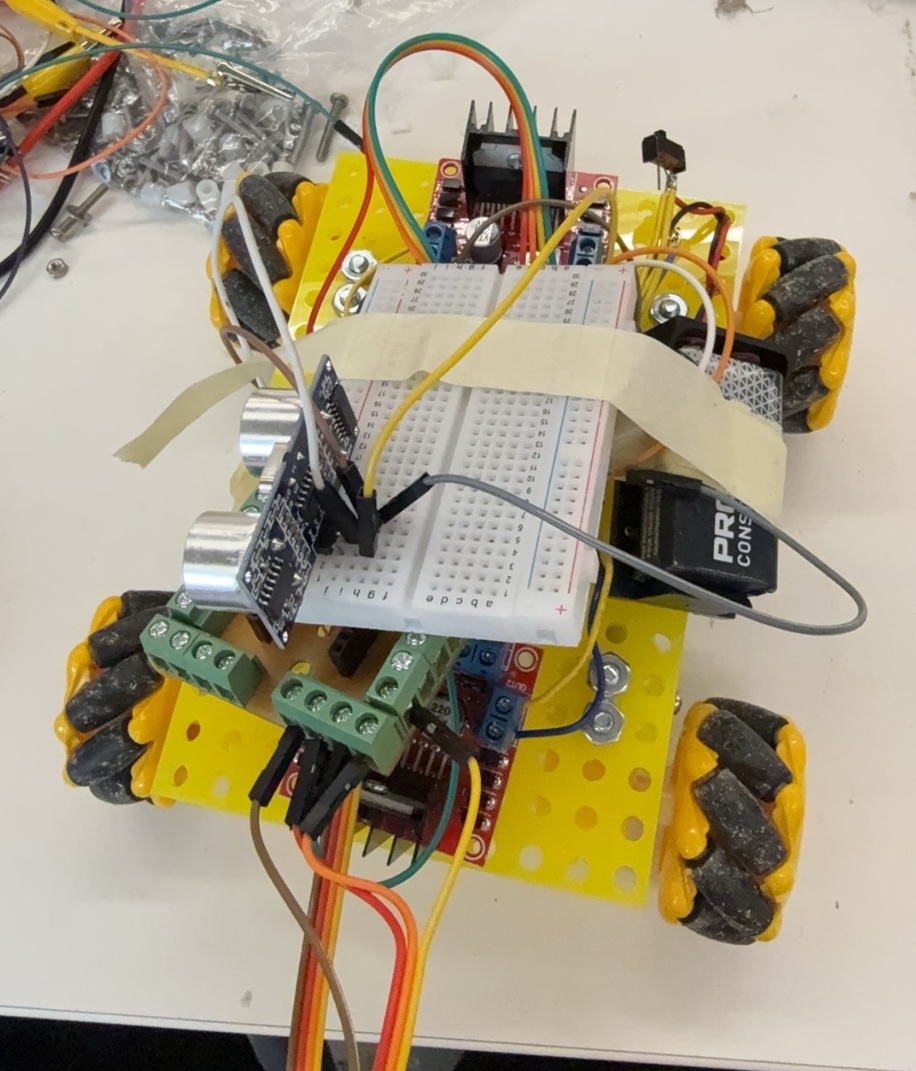
however, after i turned on the machine, the wheel keeps running. it seems like the sensor and the motor are not talking to each other. through the serial monitor, i found that the sensor is malfunctioning. it can be a code issue or a connection issue, it sends a 0 distance to the wheel, which is less than the threshold distance, causing the motor to run all the time
Spiral Learning Log 1215
test multiple sensors, finialize the system
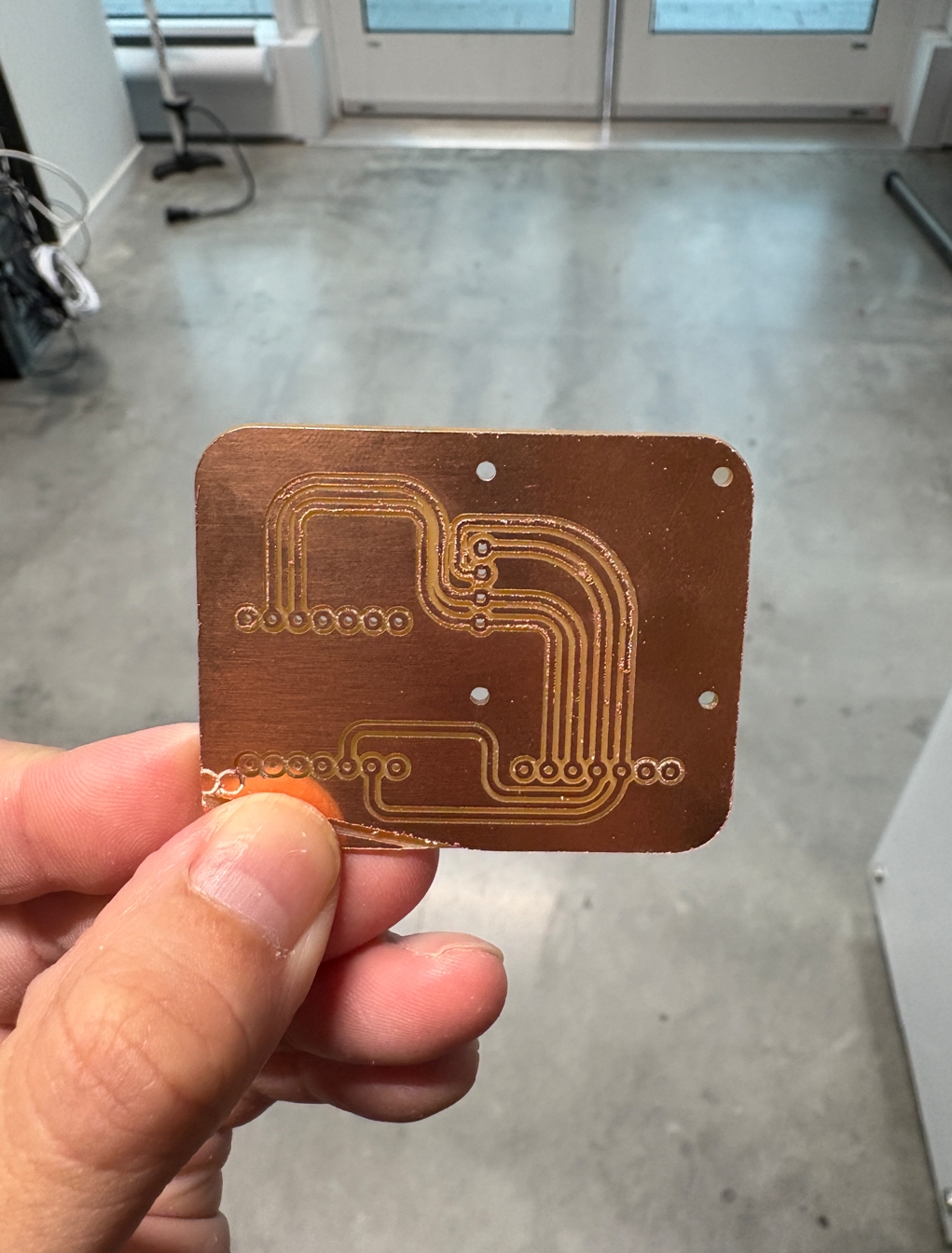
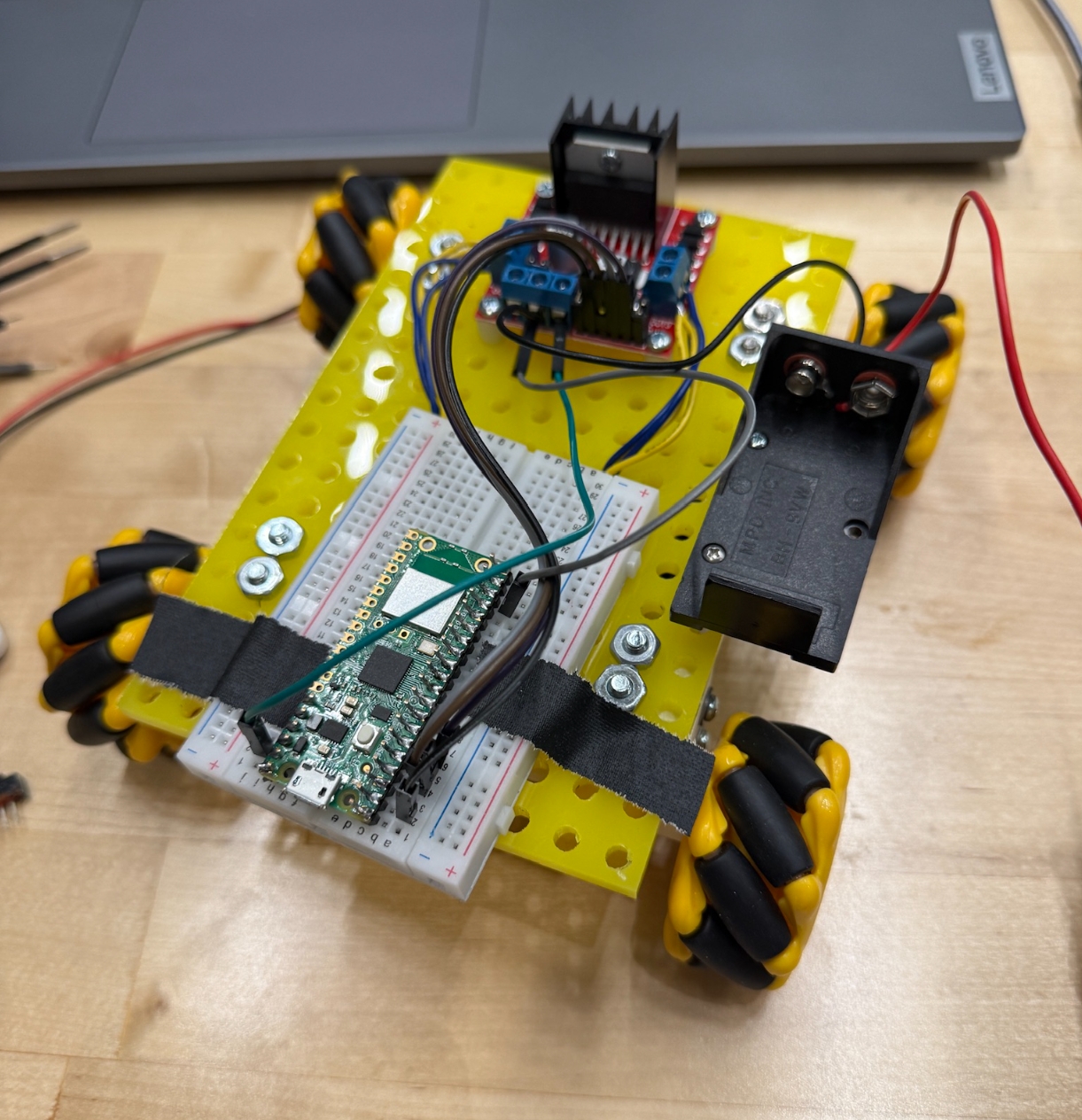
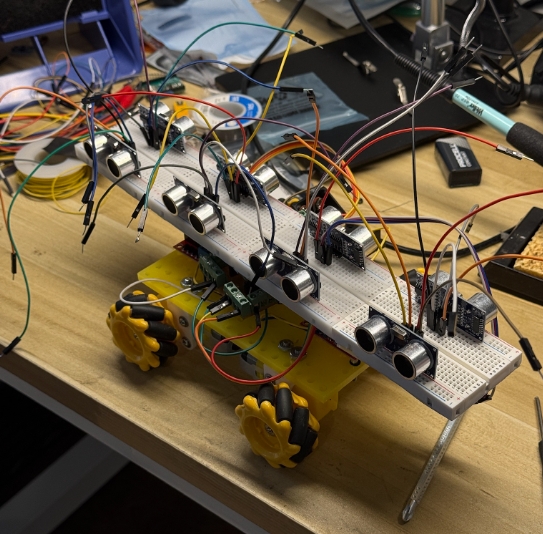
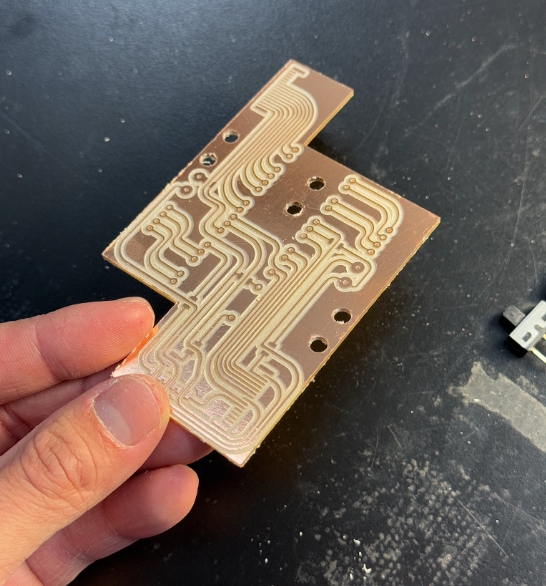
today is a big day, i aim to incorporate 8 sensors into the system although yesterday one single sensor did not work successfully. after reviewing my layout, i think it will work. the breadboard version becomes overly messy, with too many cables and connections; any movement can jeopardize connections. i decide to take the risk and just make the board because time is also ticking
i drew my board in rhino, which i found easier than kicad
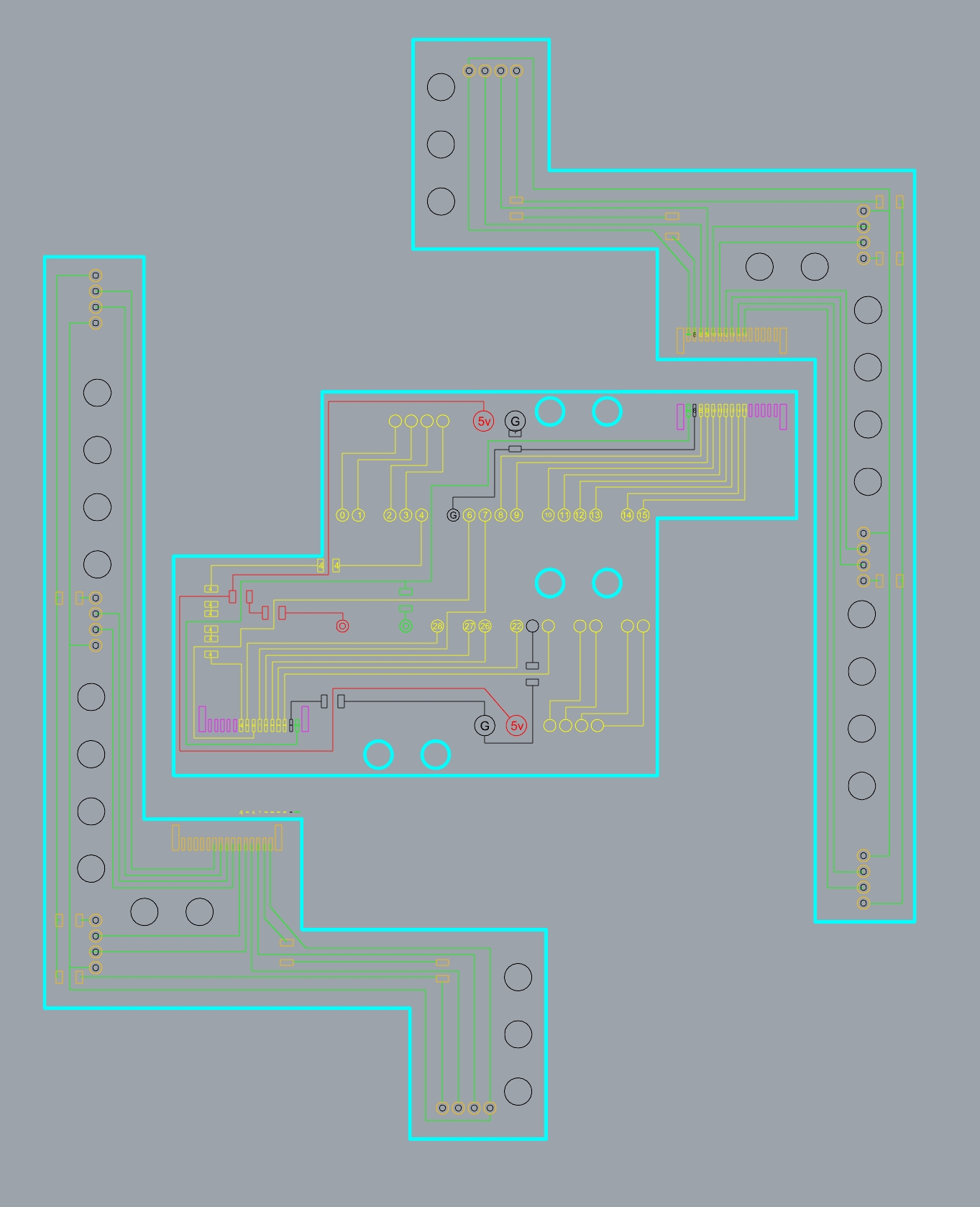
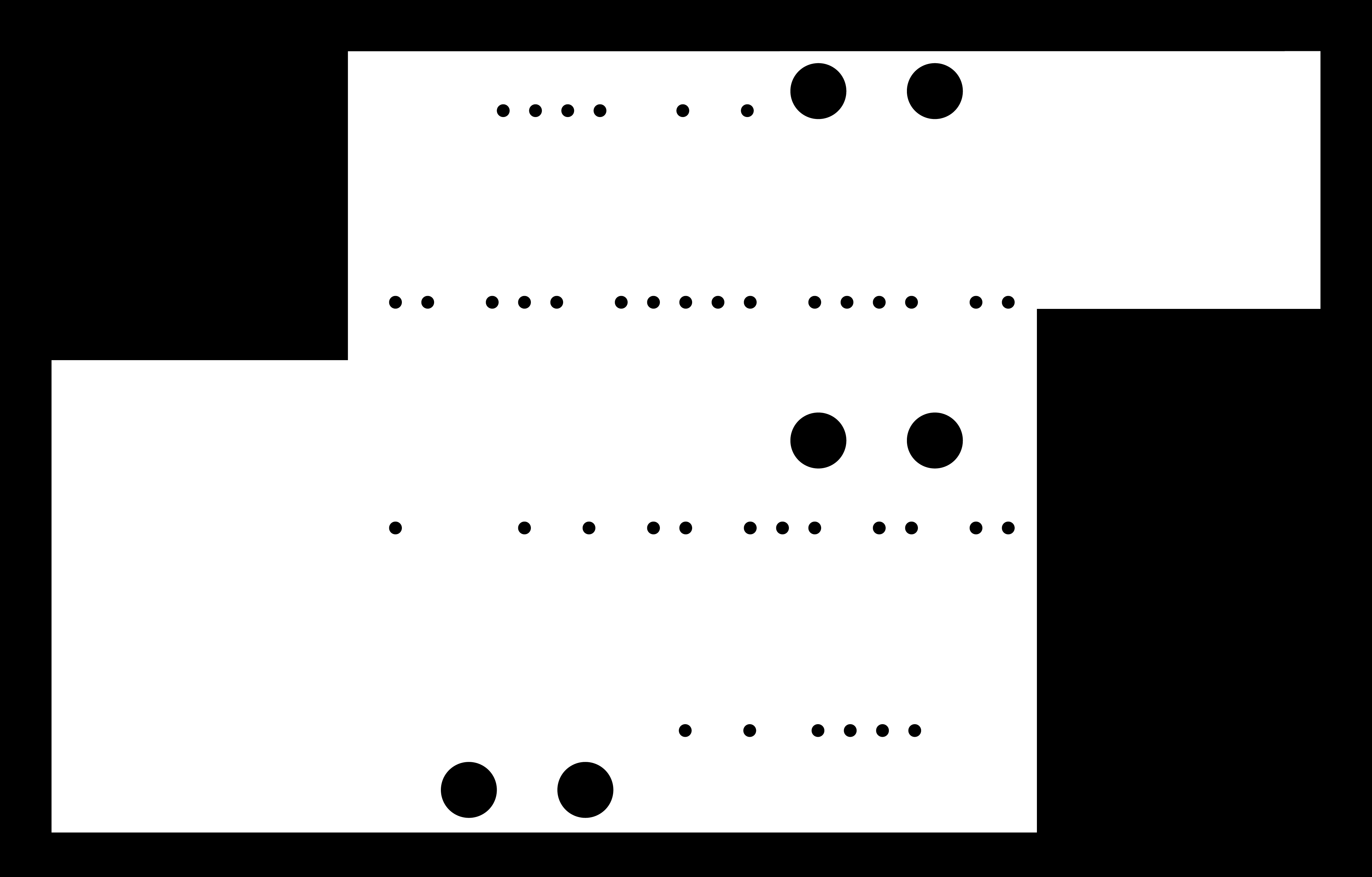
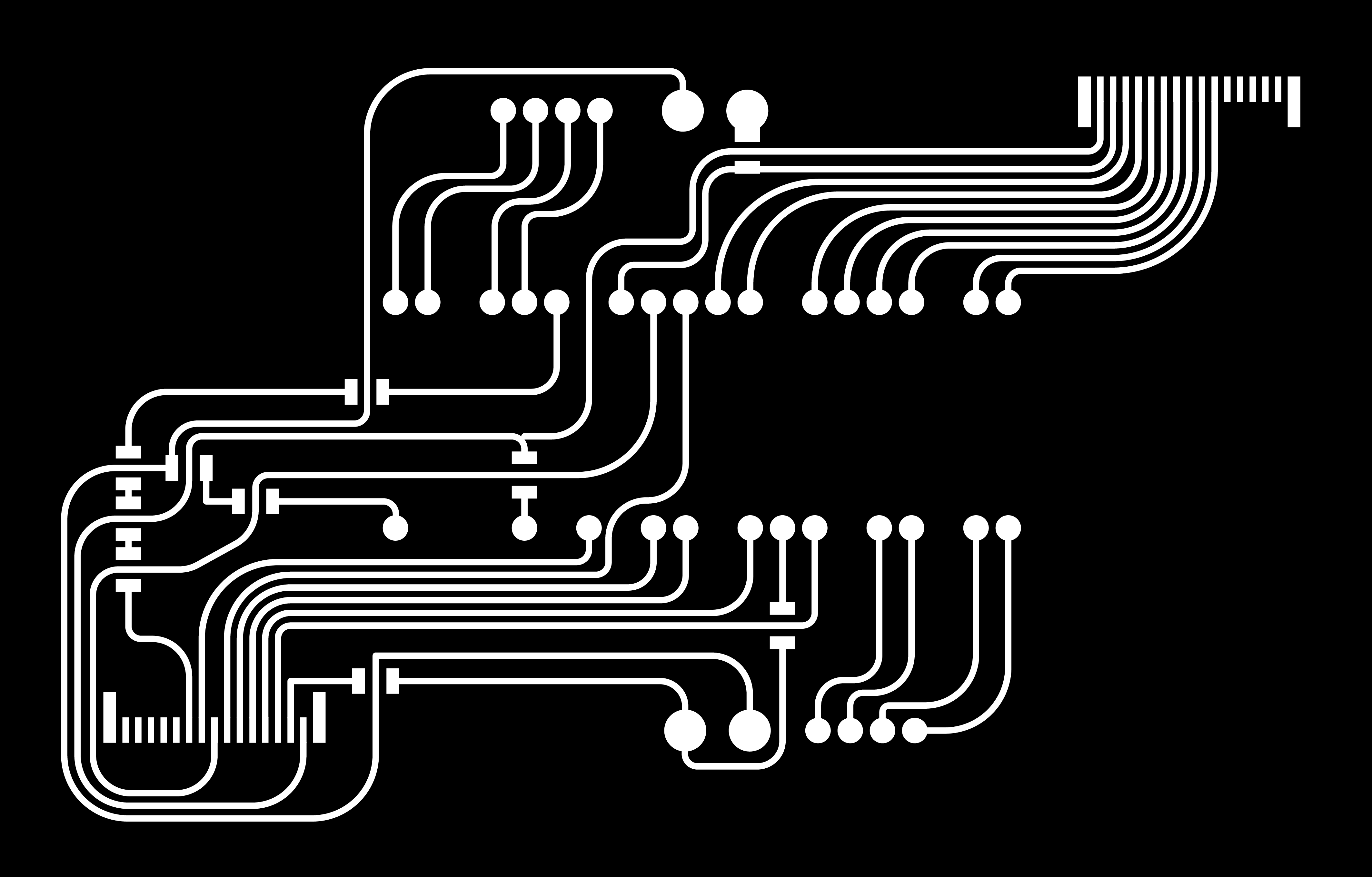
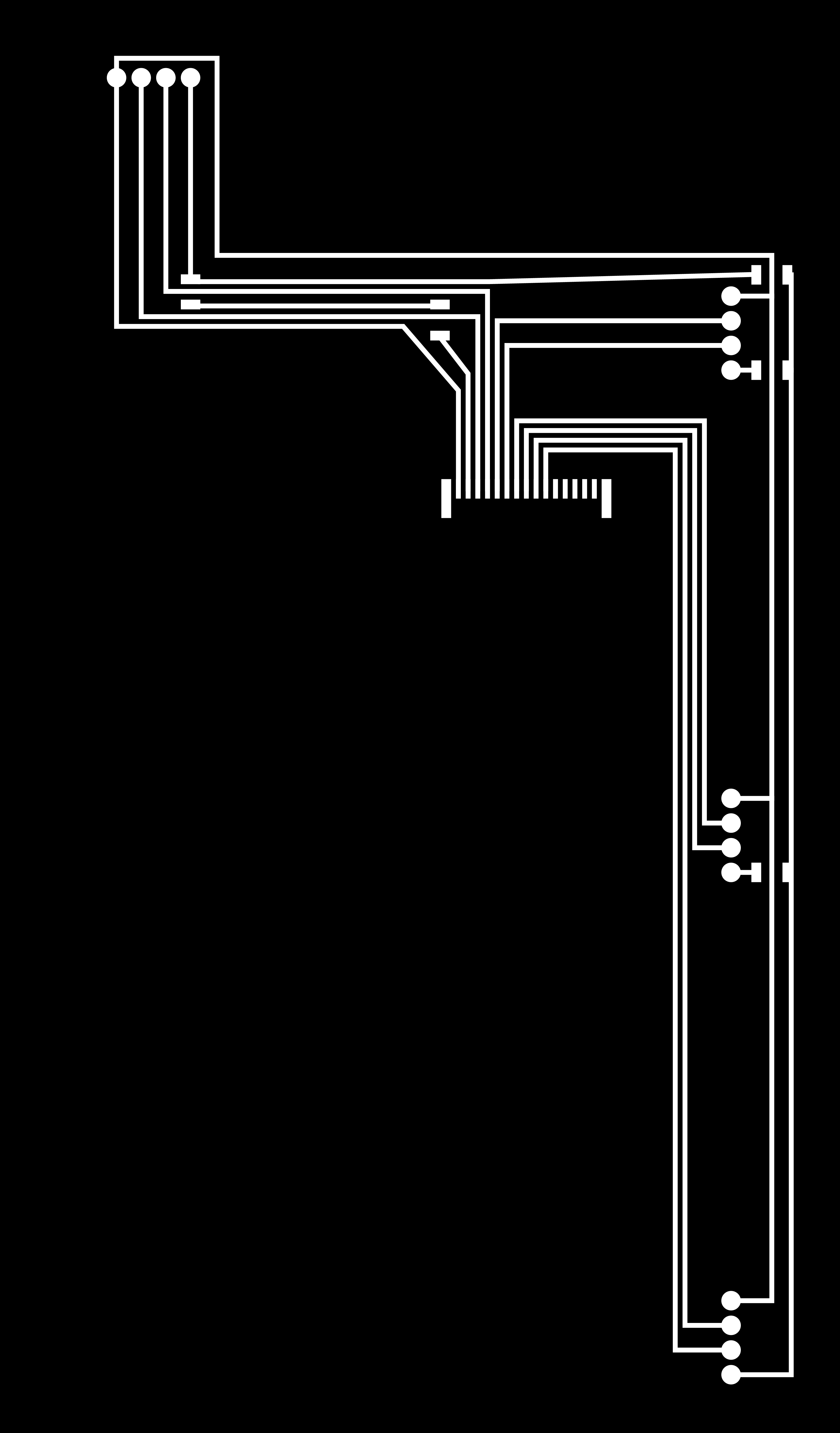
the milling process is taking about 2 hours for each board, causing traffic clog because everyone was trying to mill their boards. TA Lingdong helped me here significantly because he has an amazing voronoi diagram algorithm that simplificed the board, reducing the milling time to less than 15 minutes each board
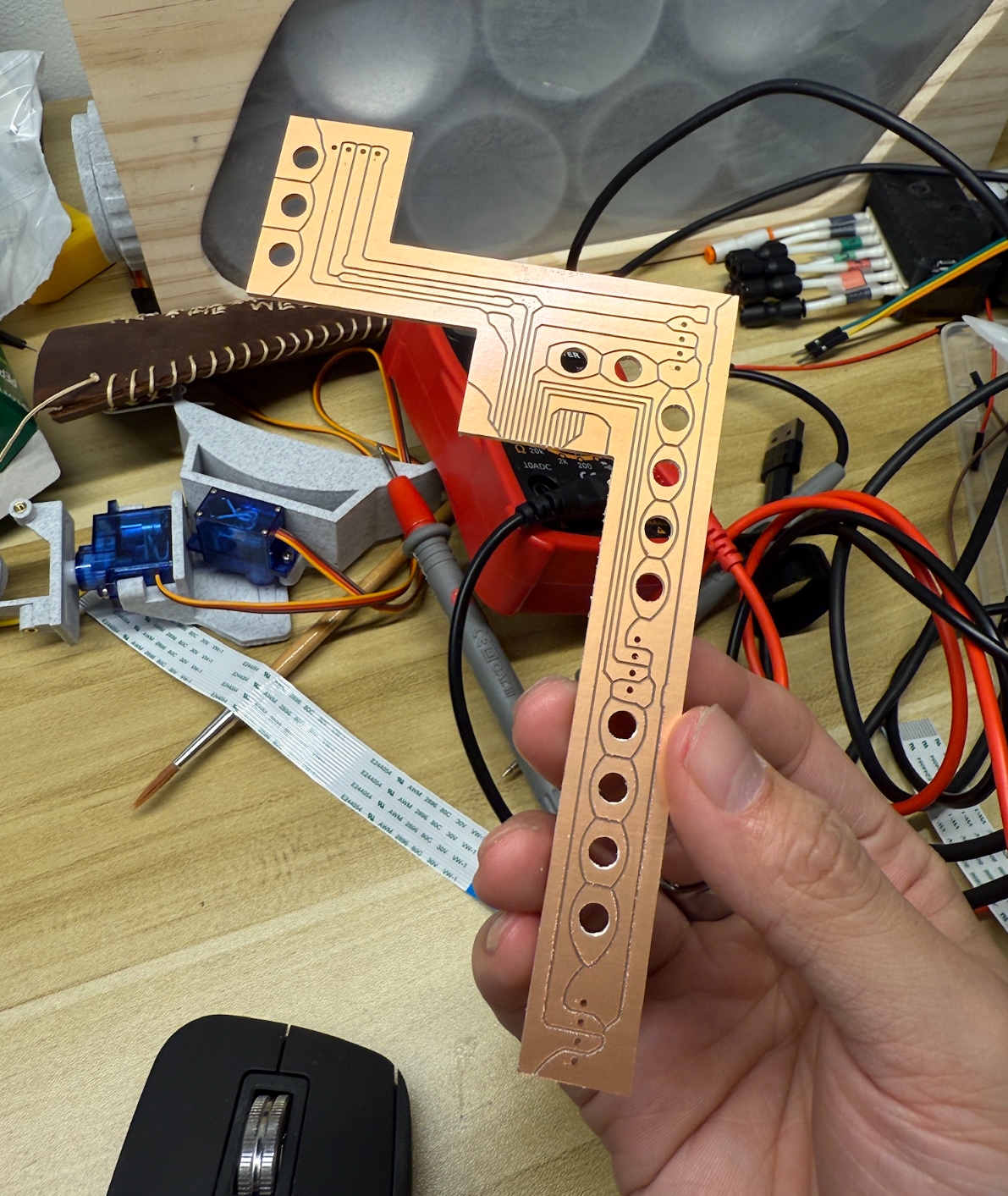
for the center board, i used the conventional milling
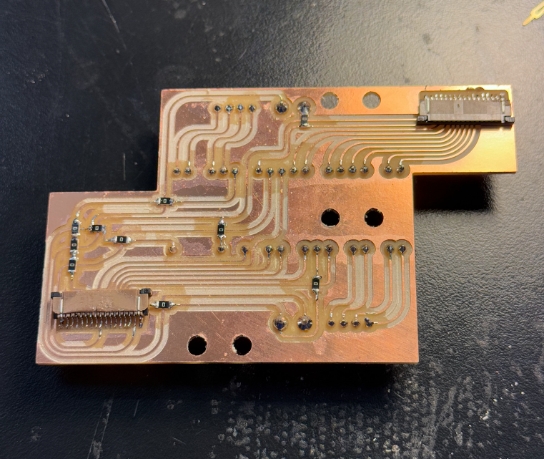
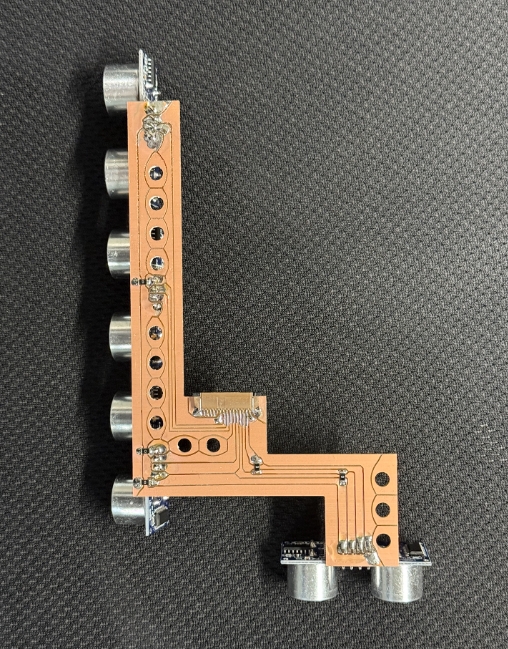
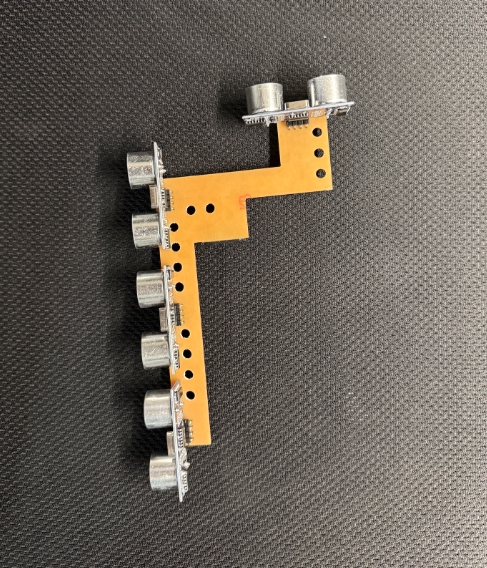
connecting boards with reclaimed FPC cables and connectors
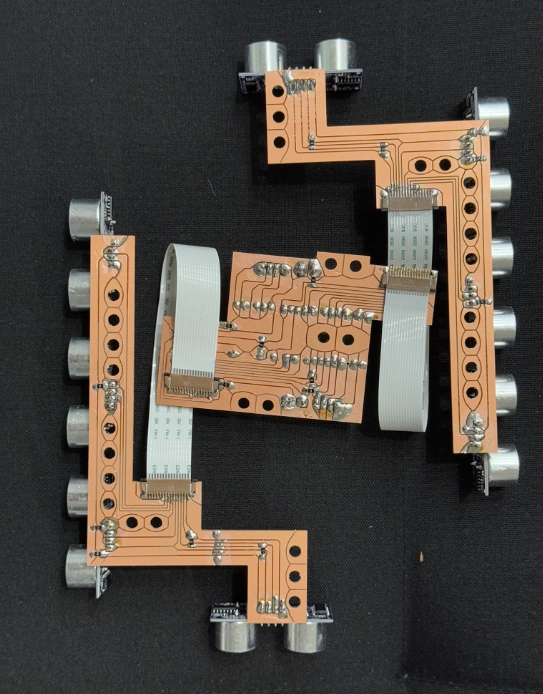

after turning on the machine, i experienced the same issue, motors running constantly. through the serial monitor again, i saw 2 of the 8 sensors were not working, sending 0 distance to the board, causing the motor to run all the time, after replacing the motors with good ones, it seems to work!
access the code here
Spiral Learning Log 1216
case, box, assembly
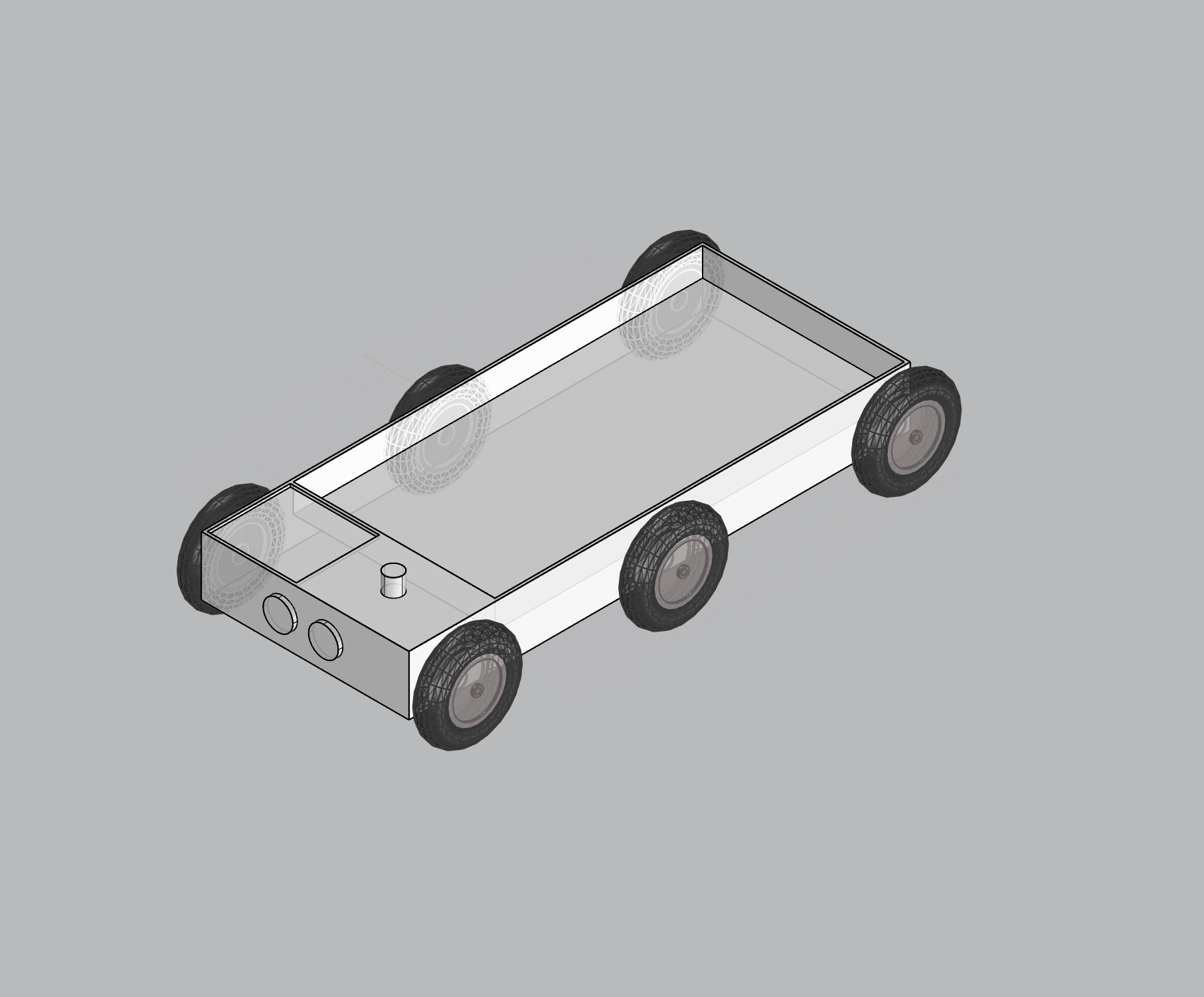
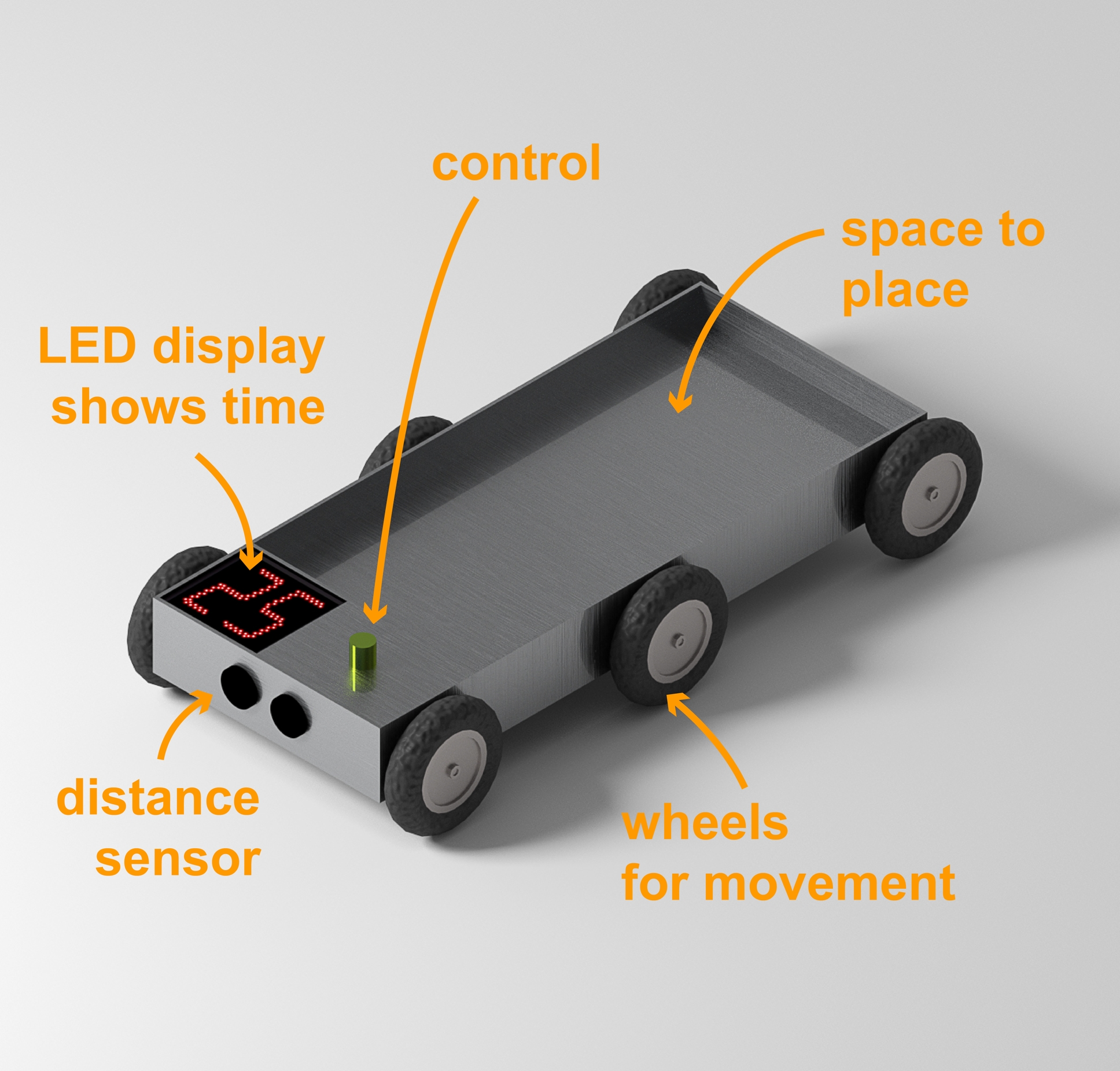
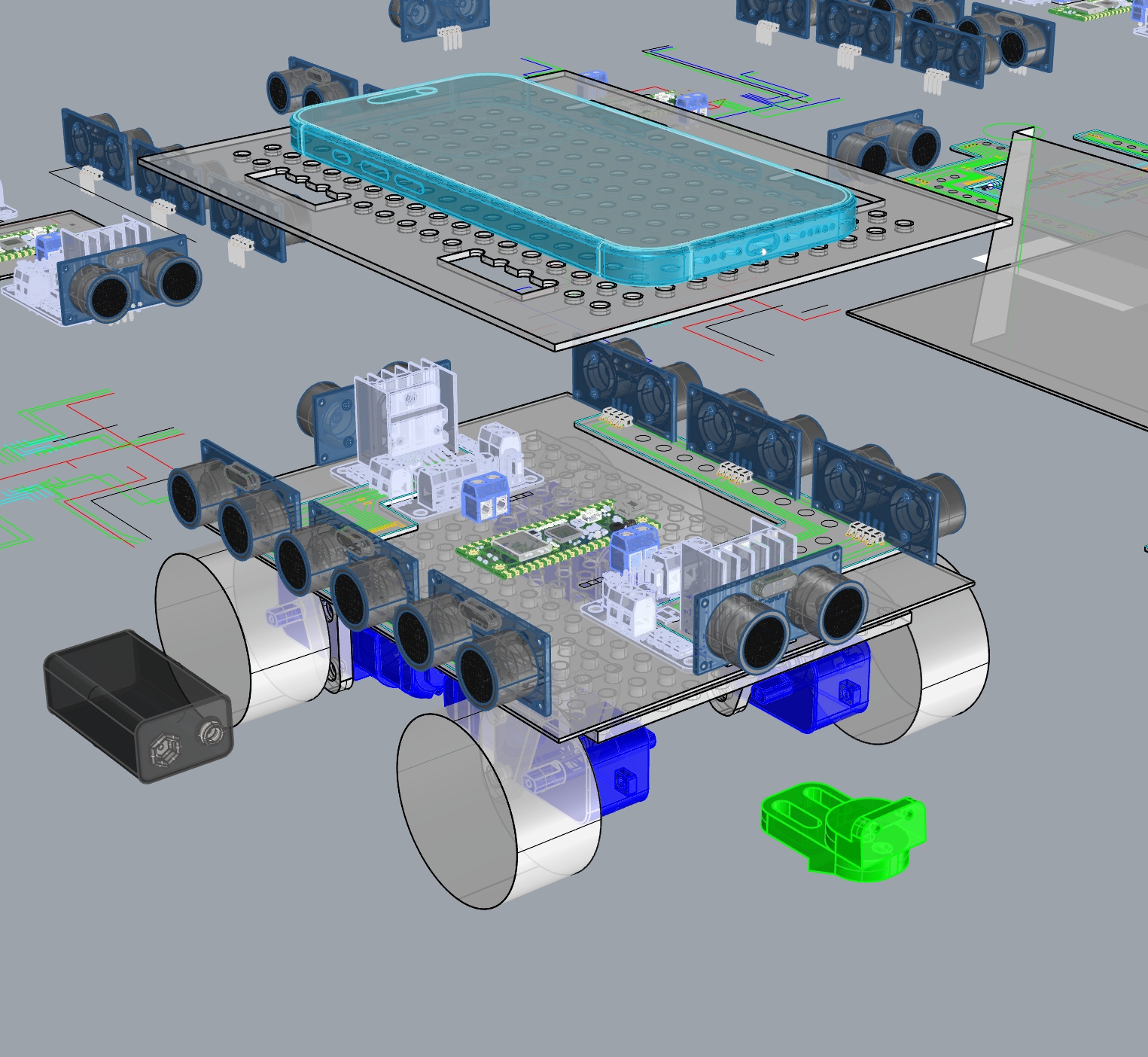
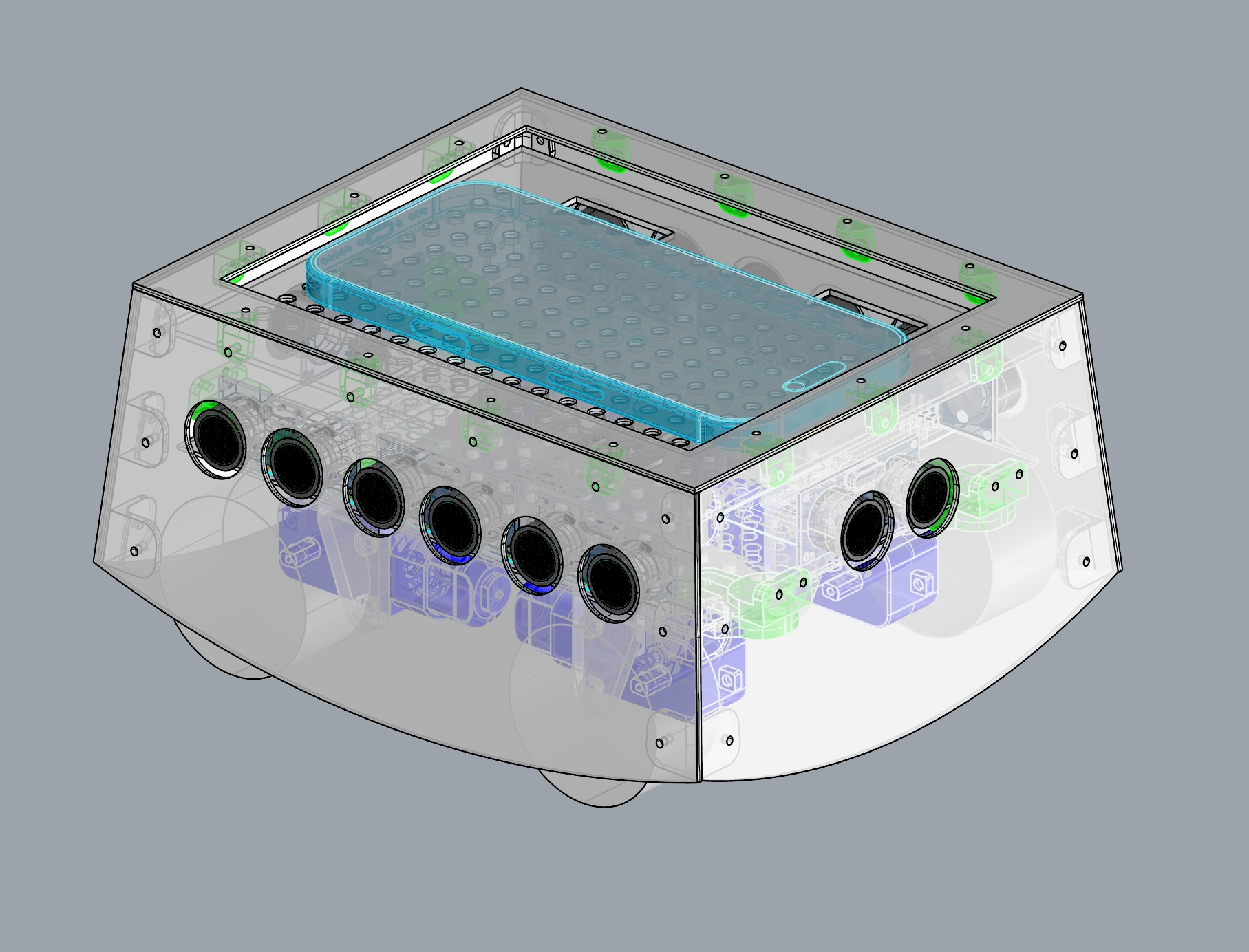
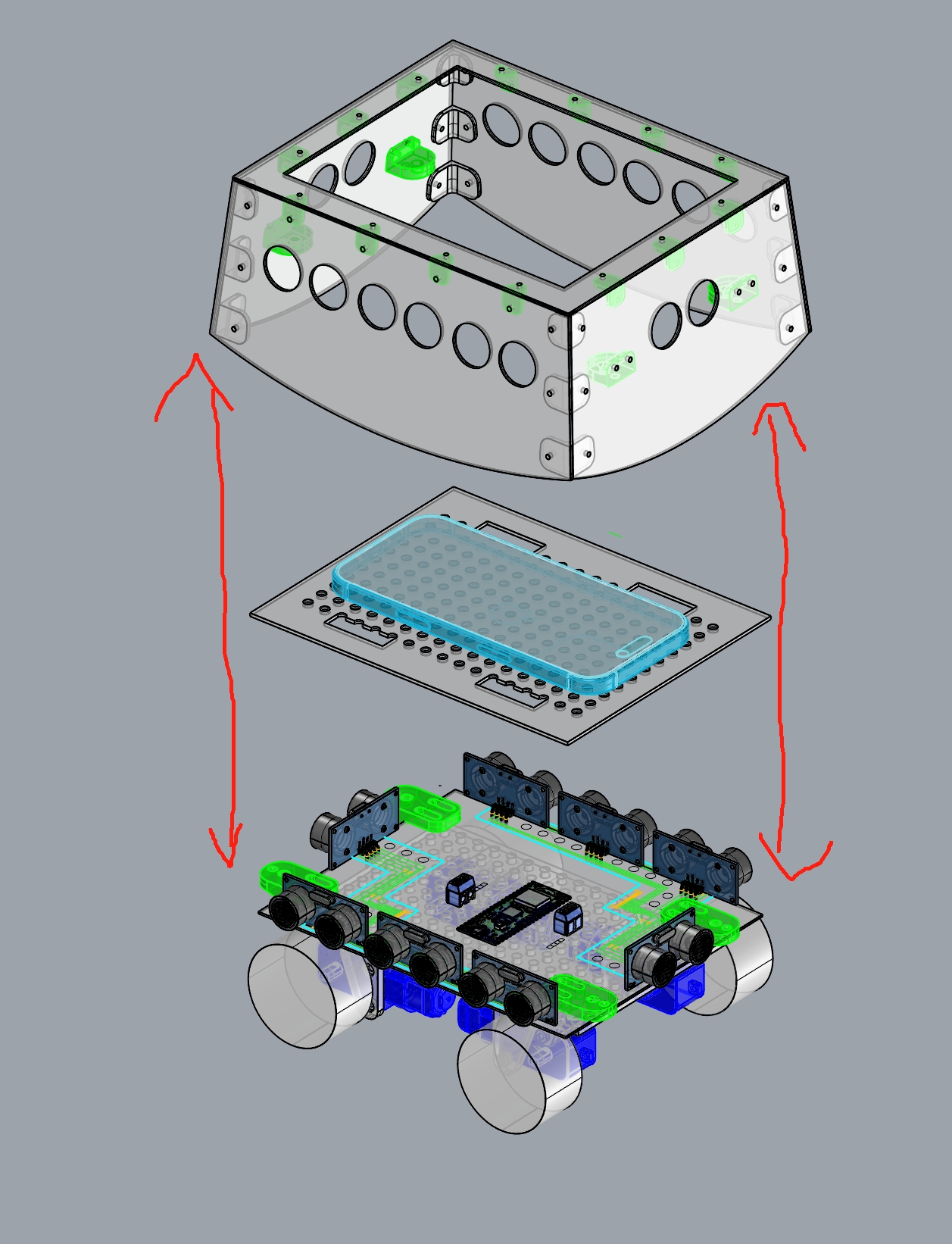
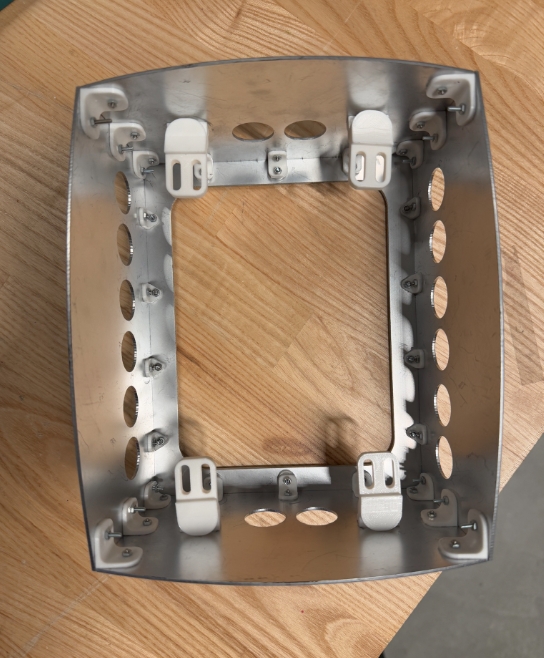
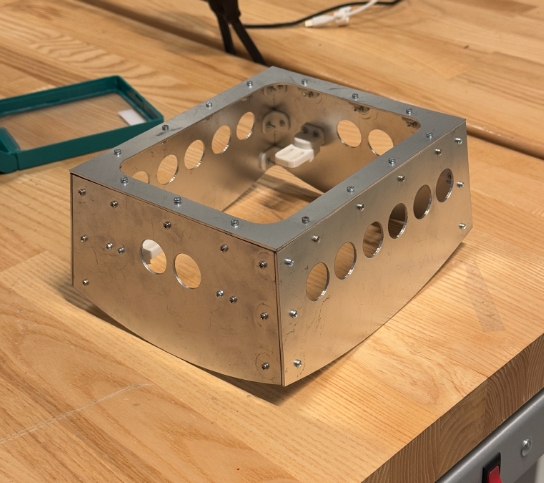
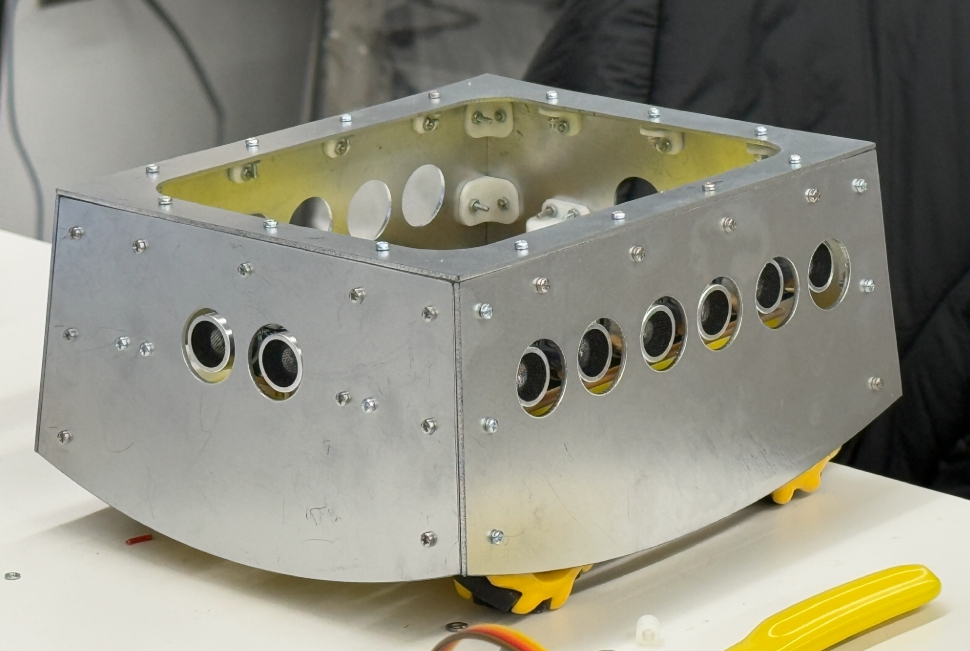
for designing the enclosure, i want to make it more abstract, less like a robot and more of a strange object. the overall shape is a box, with the top slightly tapered. the top is open for people to place their phone. the phone should be secured with straps. multiple circular cutouts are made, allowing the ultrasonic sensors to read the distance. for the bottom, i gave it a slight curve so the overall thing feels like floating
i want to use aluminum sheets for the cladding system, however, after communicating with TA Alfonso, our schedule did not work out conveniently. so, with aluminum in mind, i ended up laser cutting acrylic sheets and spray painting them to make them seem metallic
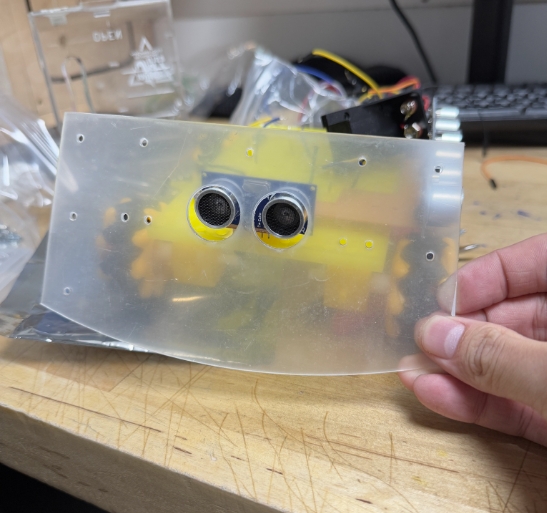
i also used the sand blasking machine to sand blast the acrylic pieces so the spray paint will stay longer
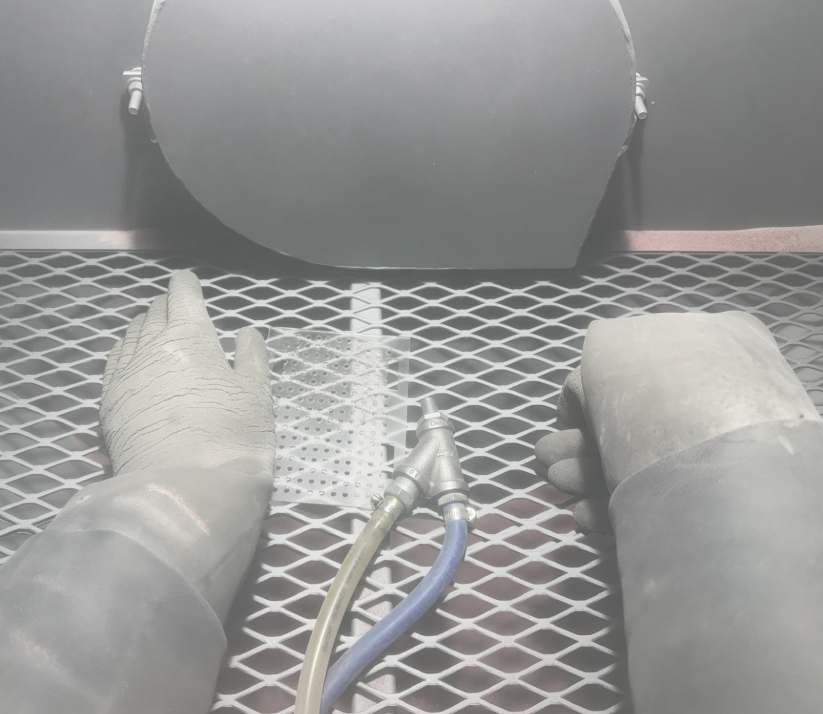
i used the construction system of aluminum sheets, using small connectors to connect these pieces, the platform are 3d printed
special thanks
special thanks to TA Lingdong and TA Leo, they helped me a lot throughout the semester, also special thanks to Quincy from Tangible group and Bobby from the class who allowed me to use their spaces