beginnings
I am so lucky to have such an organized, fun, and creative group!!! We started planning and ideating for machine week on Nov 6 - almost a week in advance! We had two big meetings where we shared ideas and narrowed down to several ideas, before landing on THE NEILBOT LABUBU ISOCAHEDRON BALL 10000!!! We then split into teams to divide the work -- I joined the MechE team that was comprised of Ceci, Jacqueline, Sara, Edward, Ben, Huanyu, Eitan, and Charlie, and others that floated in and out! Such a great team and even better mems.version 1: crank mechansim
Initially, the team planned to actuate the isocahedron using a crank mechanism that Jacqueline made: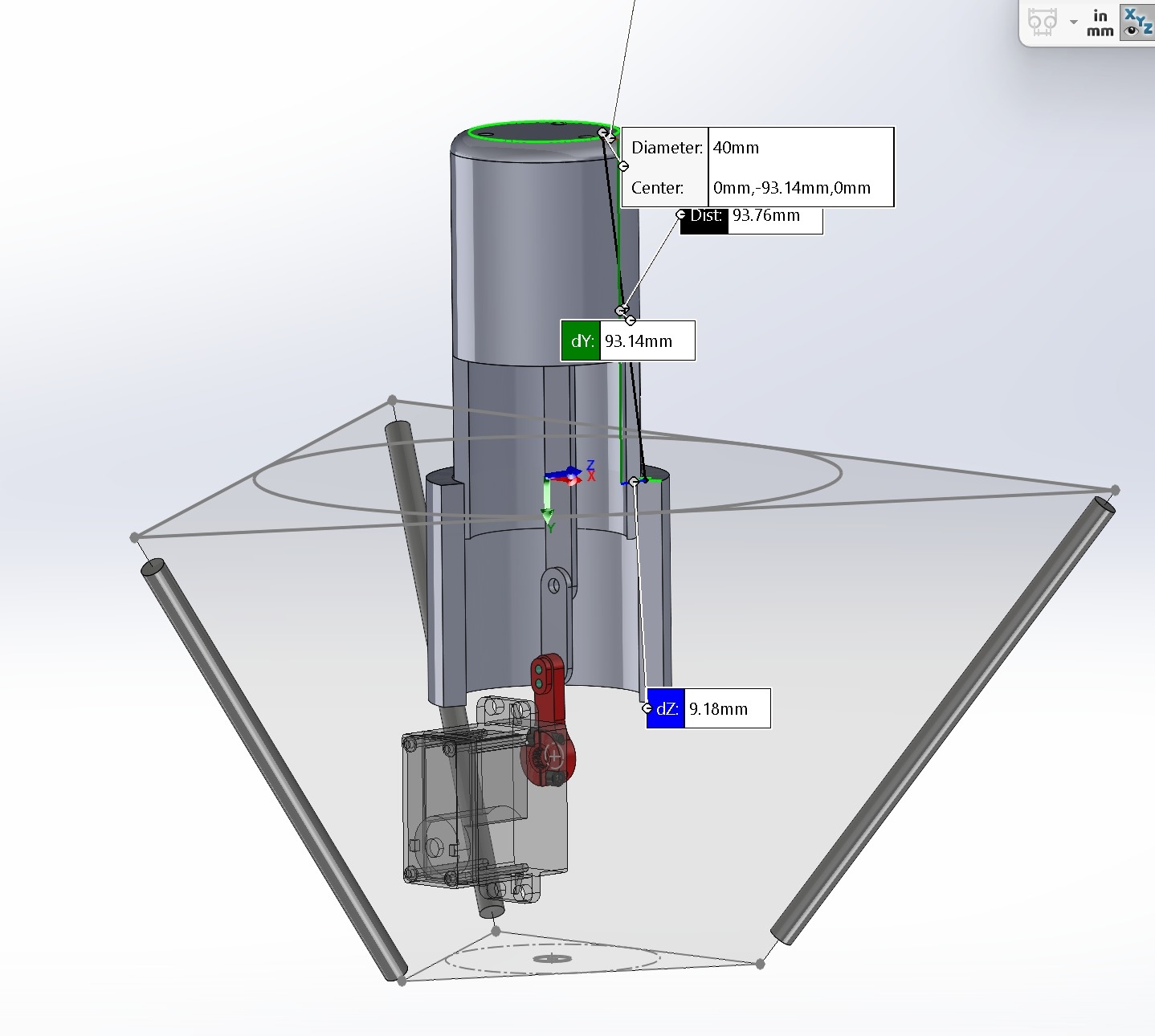
We had to fit all of the stuff inside of this unit cell, and my job became to find a way to mount the servo somewhere to actuate the crank. There was a lot of back and forth about mounting holes, correct distances, and maximizing the throw. We were a little confused as to how much throw was needed and then how to get that throw from the limited degrees of freedom from the crank, but eventually things settled and I could start on the mount.
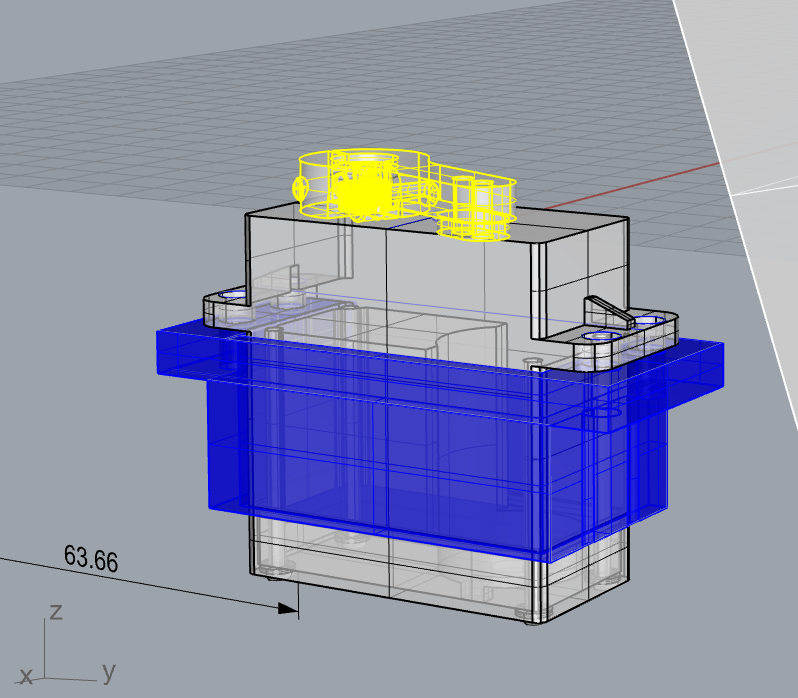
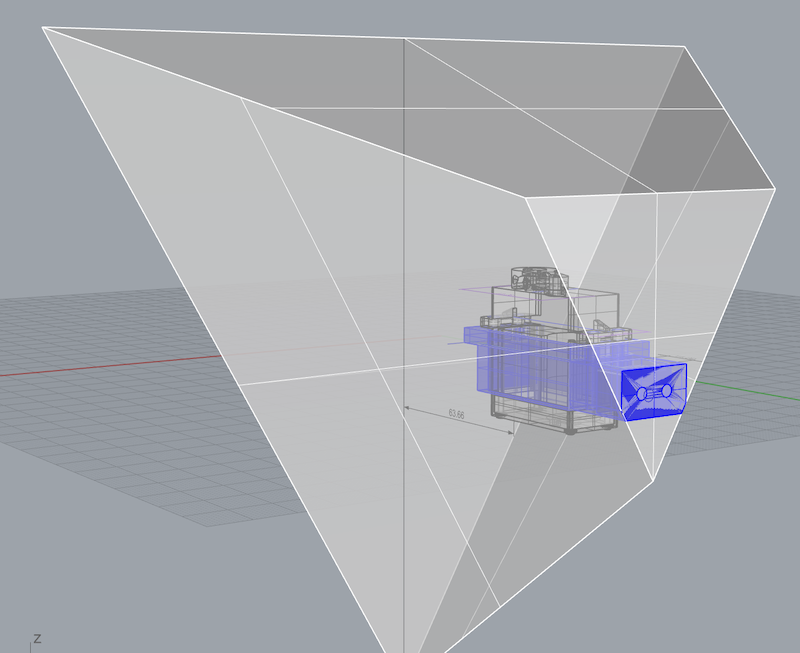
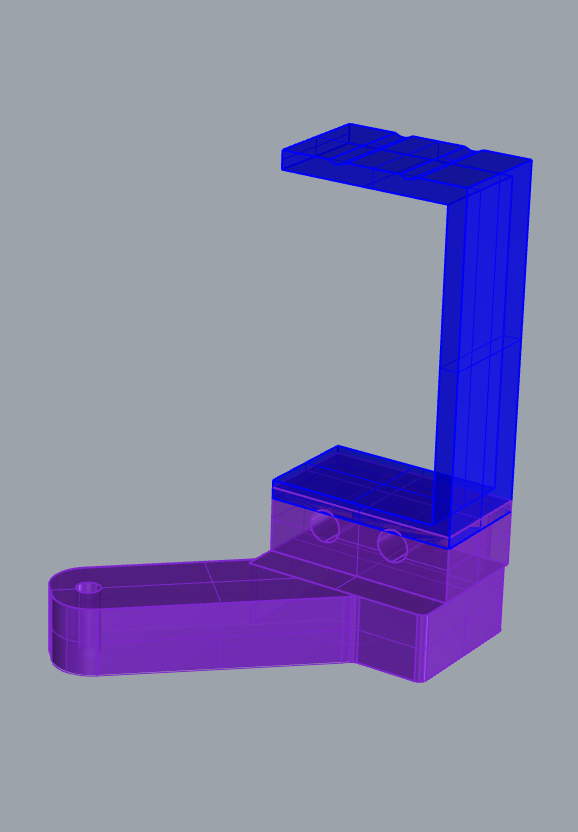
I started with the servo CAD model that I got from Jacqueline's file, and made a little carriage for it to sit in and screw into. then, I positioned it inside of the unit cell at the correct distance, and made a little connection point to the smaller triangle. It was a little difficult to figure out how to attach it to such a small area, but I figured it out (even though later we find assembly to be a pain).
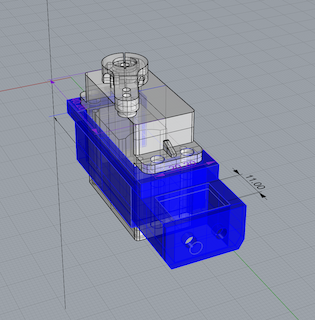
It has a little opening and screw holes for the screws to go into here.
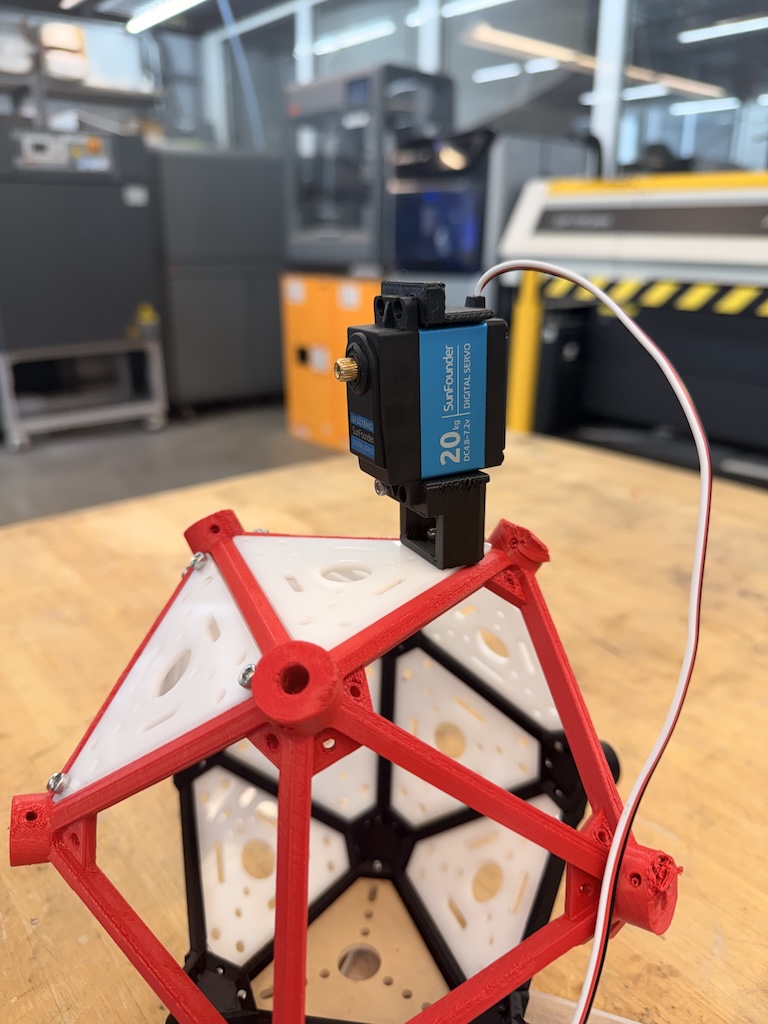
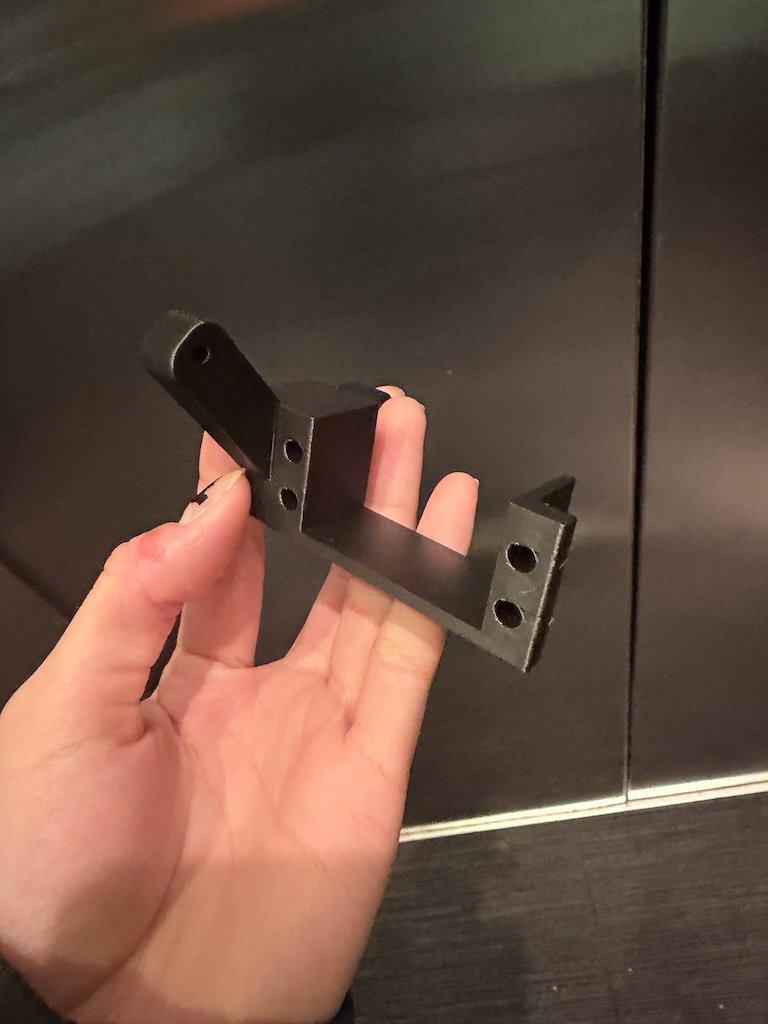
Here was my first test on the servo attached to the inner triangle - a success!! As I said, the screws were a little annoying to put in, but it was doable with a little effort.
Then I started printing a bunch of them!
All was good and dandy, we had 20... and then the crank proved to not push far enough and was getting stuck. So, from guidance from TAs and some more brainstorming we shifted GEARS (heh) on Monday morning...
version 2: rack and pinion

SO! All of Monday, Ben and I quite literally reached flow state as we rack and pinioned. I had a rack and pinion that I designed for something else a couple weeks ago, and we decided to use it in rest of our design. We calculated that with the servo only being able to rotate 270, to get a throw of around 10cm, we had to have a pinion diameter of 42mm. So I got started, scaled up, and put the system into the unit cell to see if it would work.
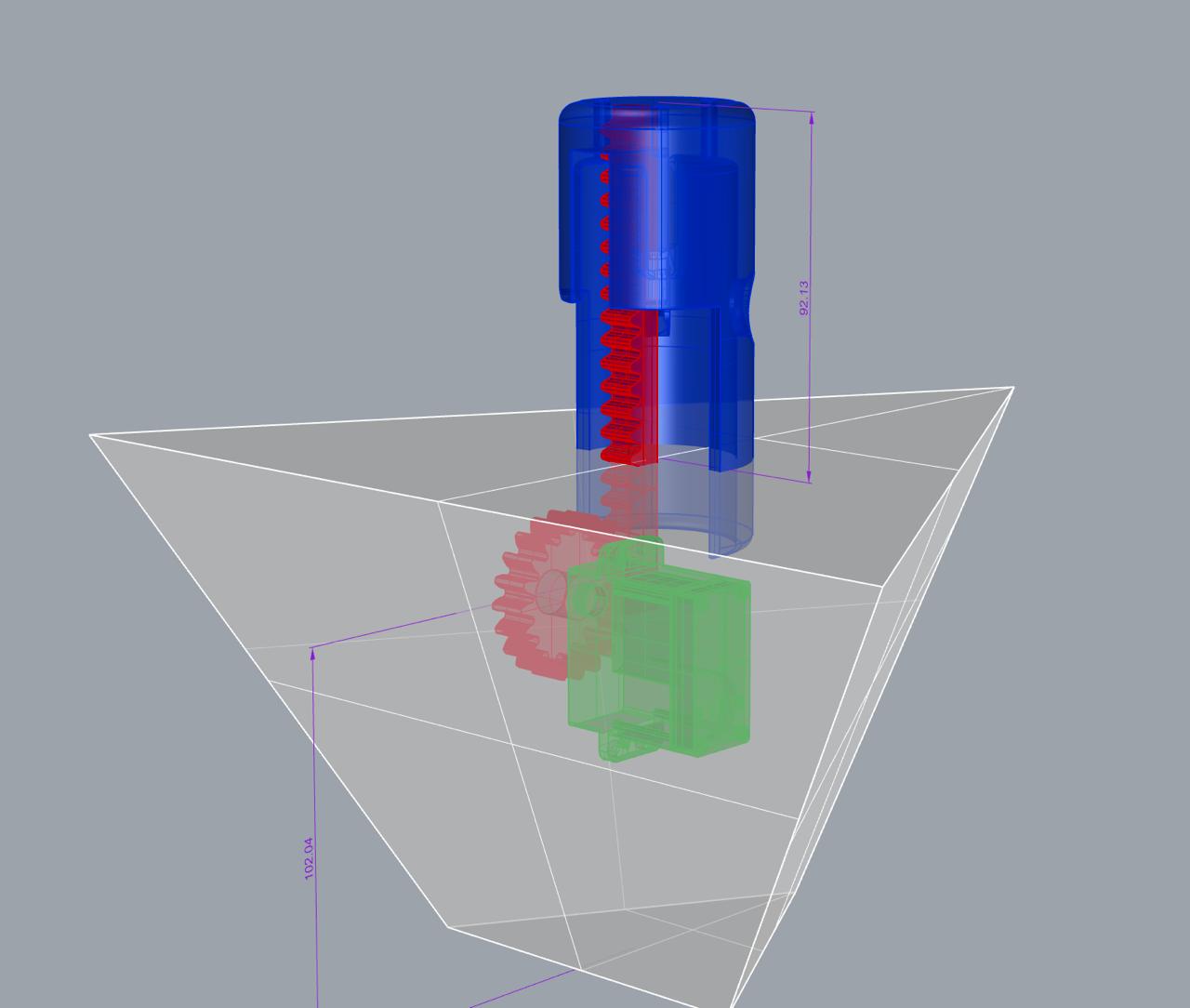
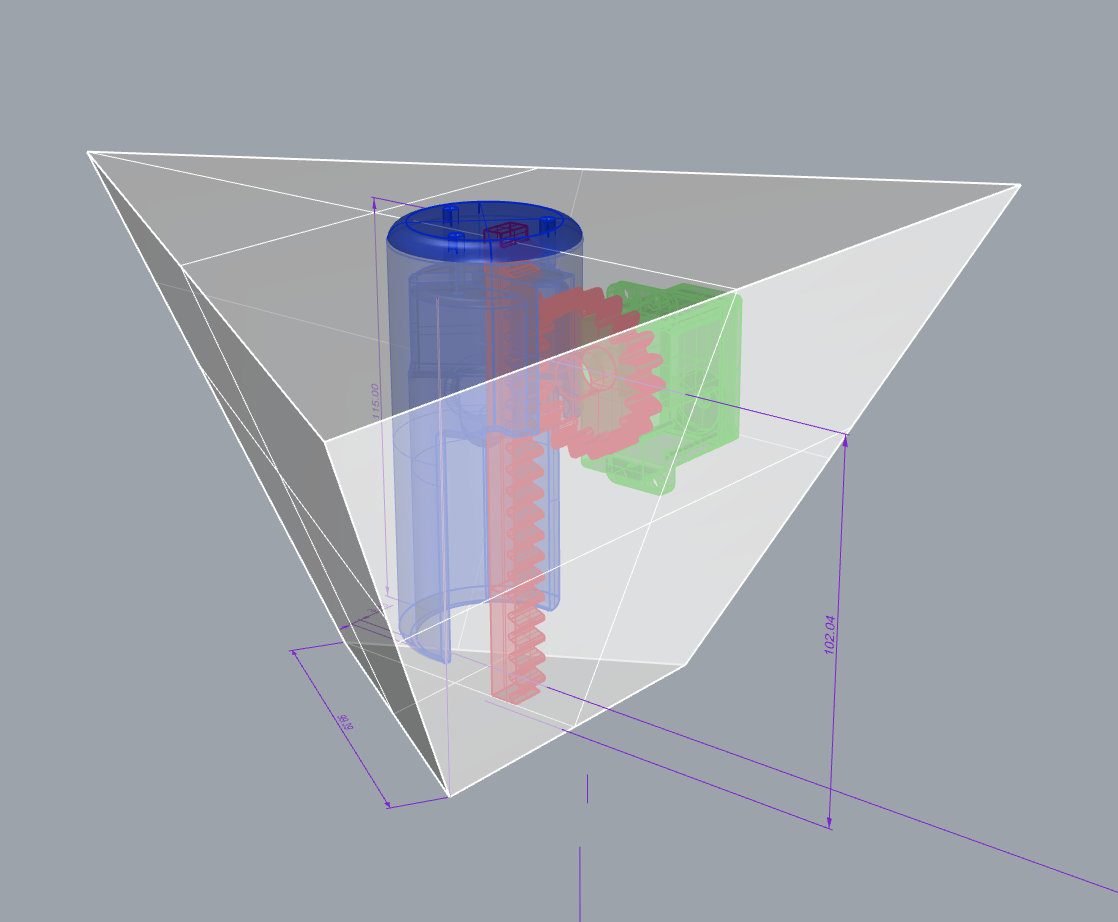
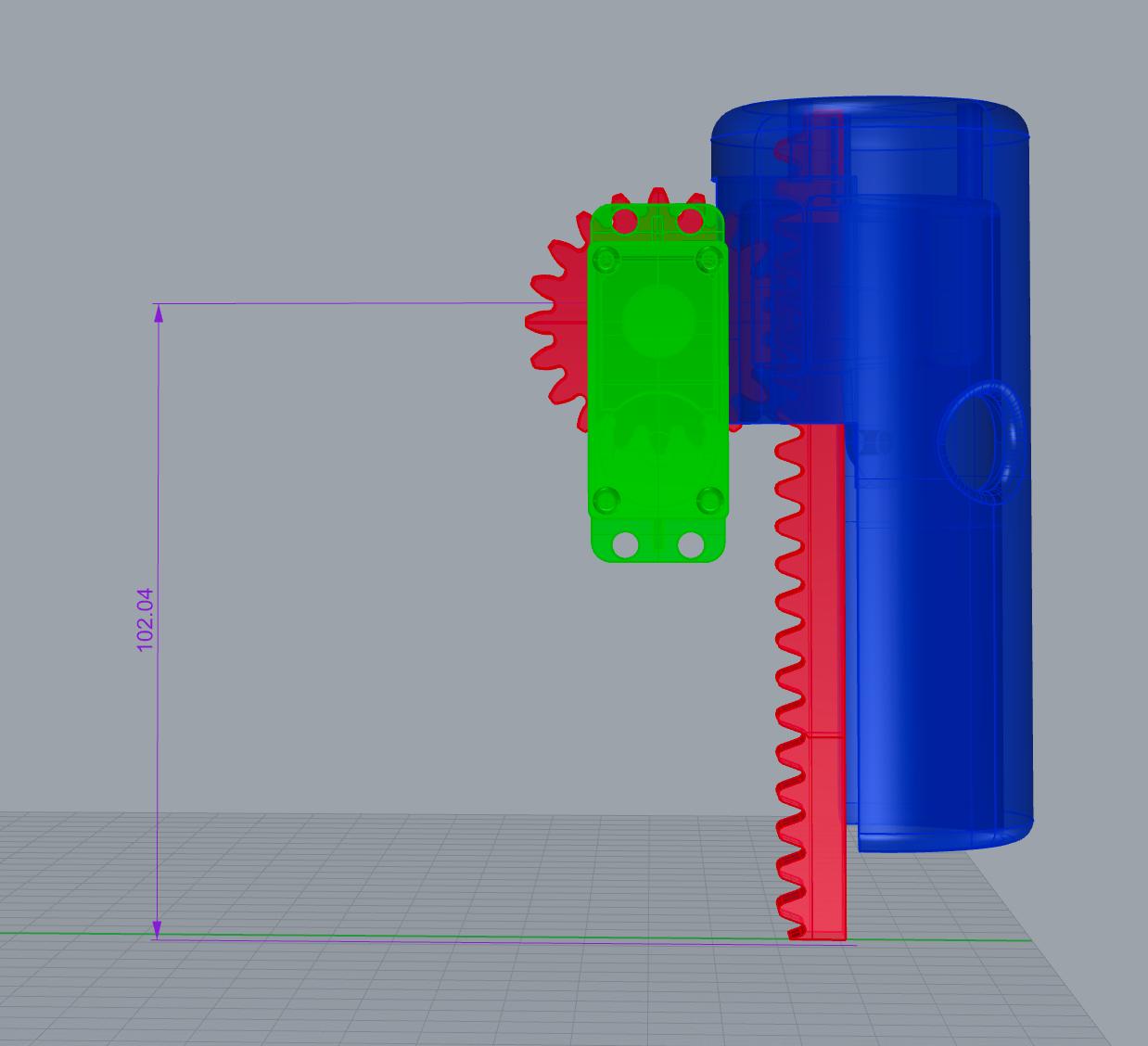
And it fit! I squeezed it into the piston that jacqueline made. But based on my model, with this method we could get around 9cm of throw!! Super exciting. I did this from Wellesley in the morning, so once I got to MIT in the afternoon, Ben and I LOCKED IN.
We made many decisions together in the span of many hours. We decided to:
- get rid of the circular piston, as it could contribute to accidental rotation from the actuation, and instead just use the rack and a surrouding rectangle as the actuator AND the piston.
- extend the rack longer so that the pinion won't get stuck or caught on the edges. - create a guide for the rack so it wouldn't slide around inside the unit cell. - make a connection point directly from servo to pinion.
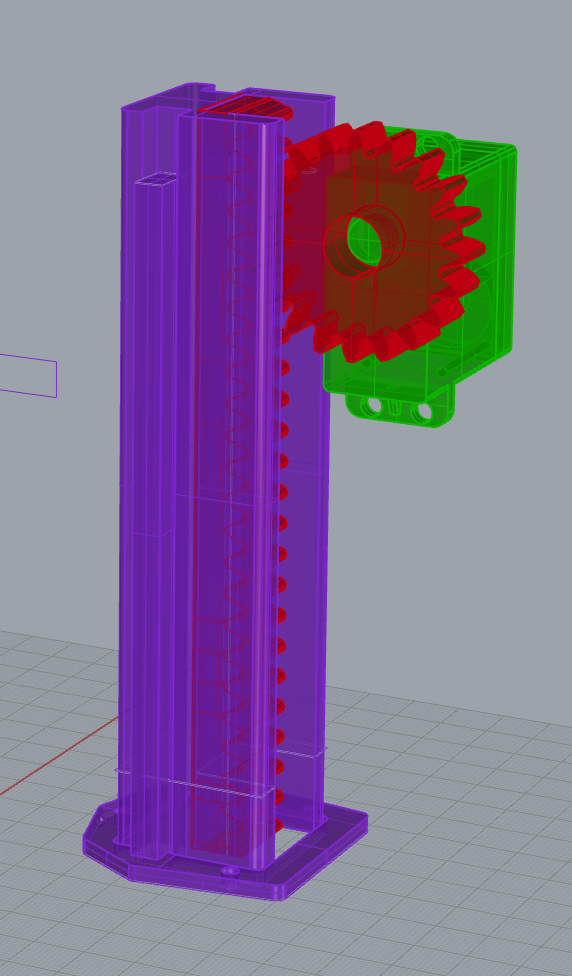
And this ^^ is what we came up with!!
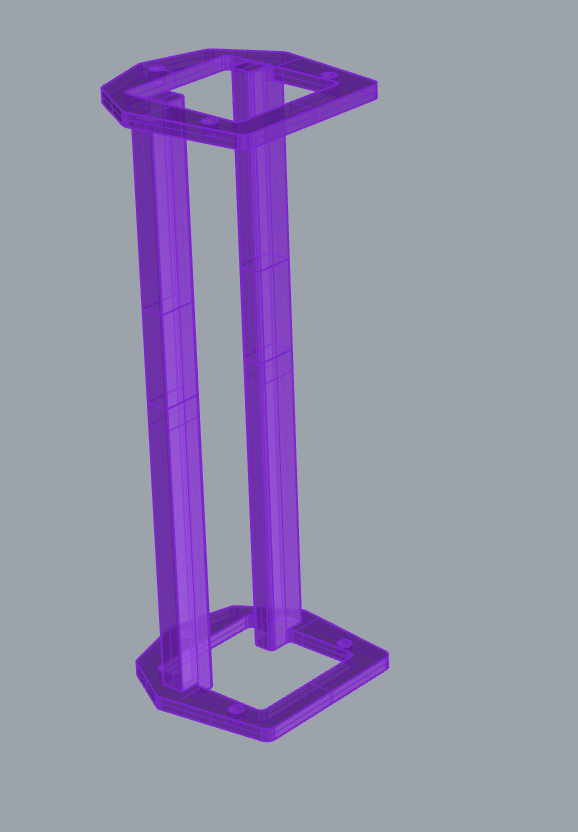
Here is the guide I designed - it slots into sides of the rack piece.



Here are all of the pieces together.

This is a pinion with the servo arm embedded inside. We used a soldering iron to heat it into place.
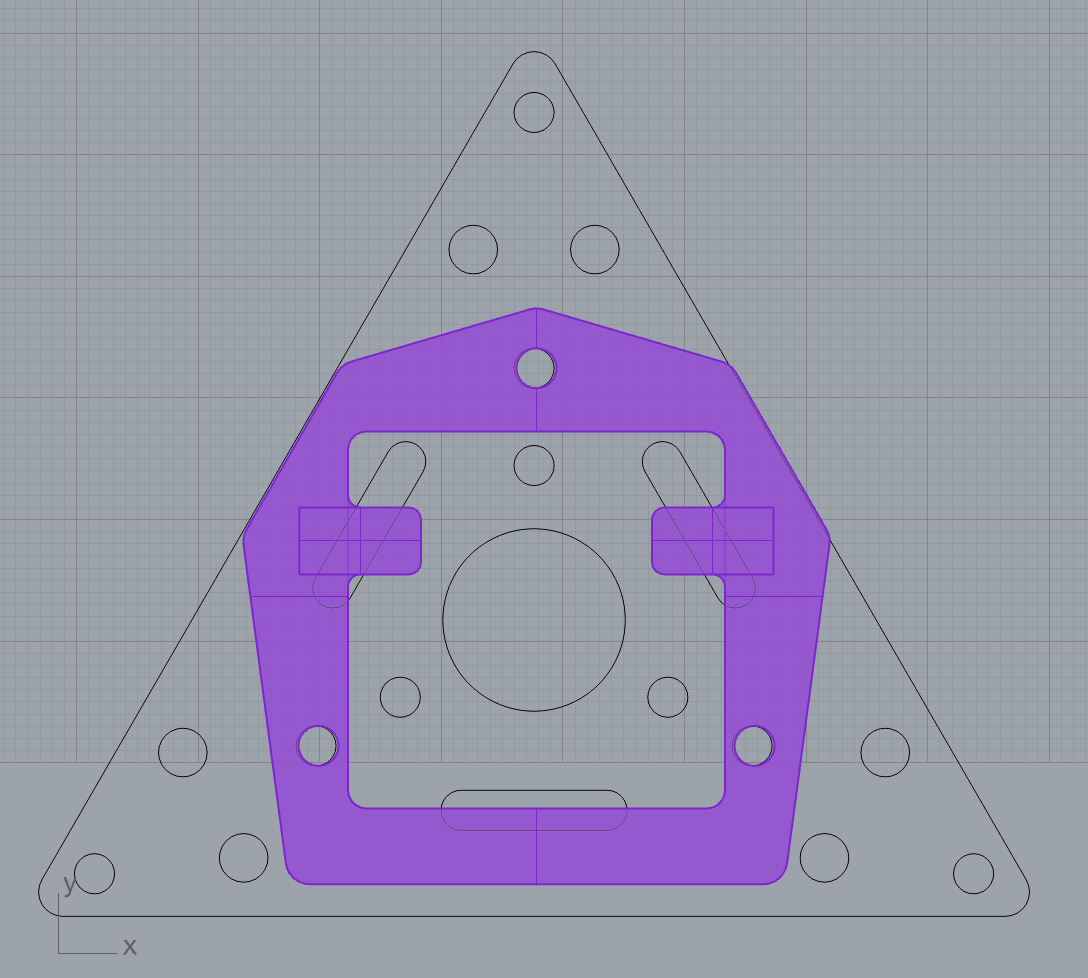
This is the updated servo mount to fit the weird holes on the larger triangle, and to place the servo with pinion as close to the top as possible for maximum extension.

Here is the rack with heat inserts for screws to screw it to the external Neil plate.
And here is the rack in action! Finally! I unfortunately could not be there for the great build, but I was able to contribute to the video editing, mass fabrication of parts, and design, so I was very happy and proud of the team!
Files