This week's work began with envisioning a final project for the course.
In my case, this consisted of an overwraught ideation process that probably took far too much of the week...
However it was important to me to make a rigorous attempt at aligning the following interests and priorities:
Artistic alignment with history and culture of Ireland
Aesthetic and scalar suitability for inclusion in an exhibition
Fundamental technical reliance on curriculum of HTMAA
These constraints led me down a rabbit hole of several ideas which I hand sketched and outlined below.
First are three ideas I chose not to pursue for primarily conceptual reasons.
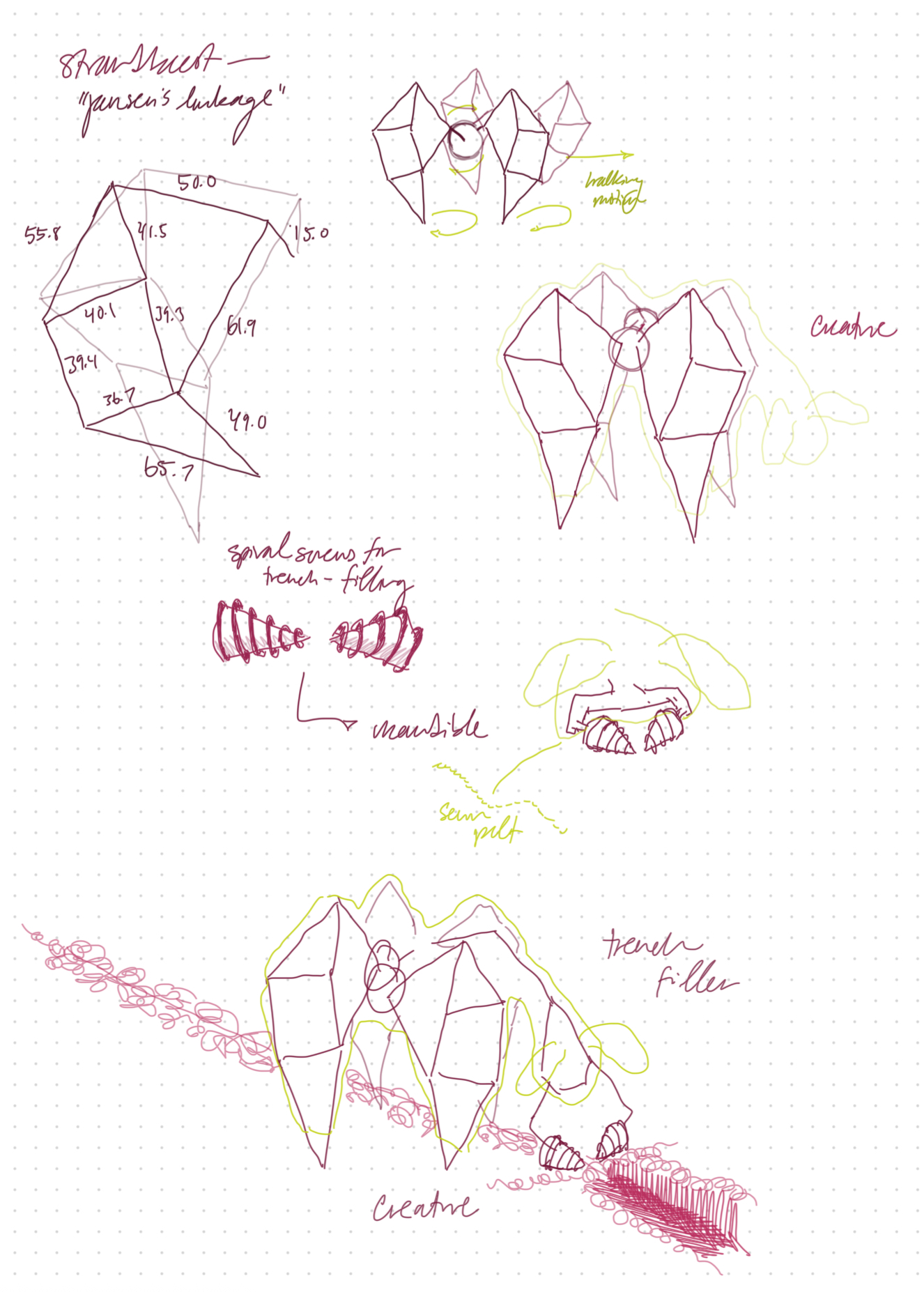
First Idea: a peatland "strandbeest" in the style of Theo Jansen.
Too complicated to assemble, too little focus on course content.
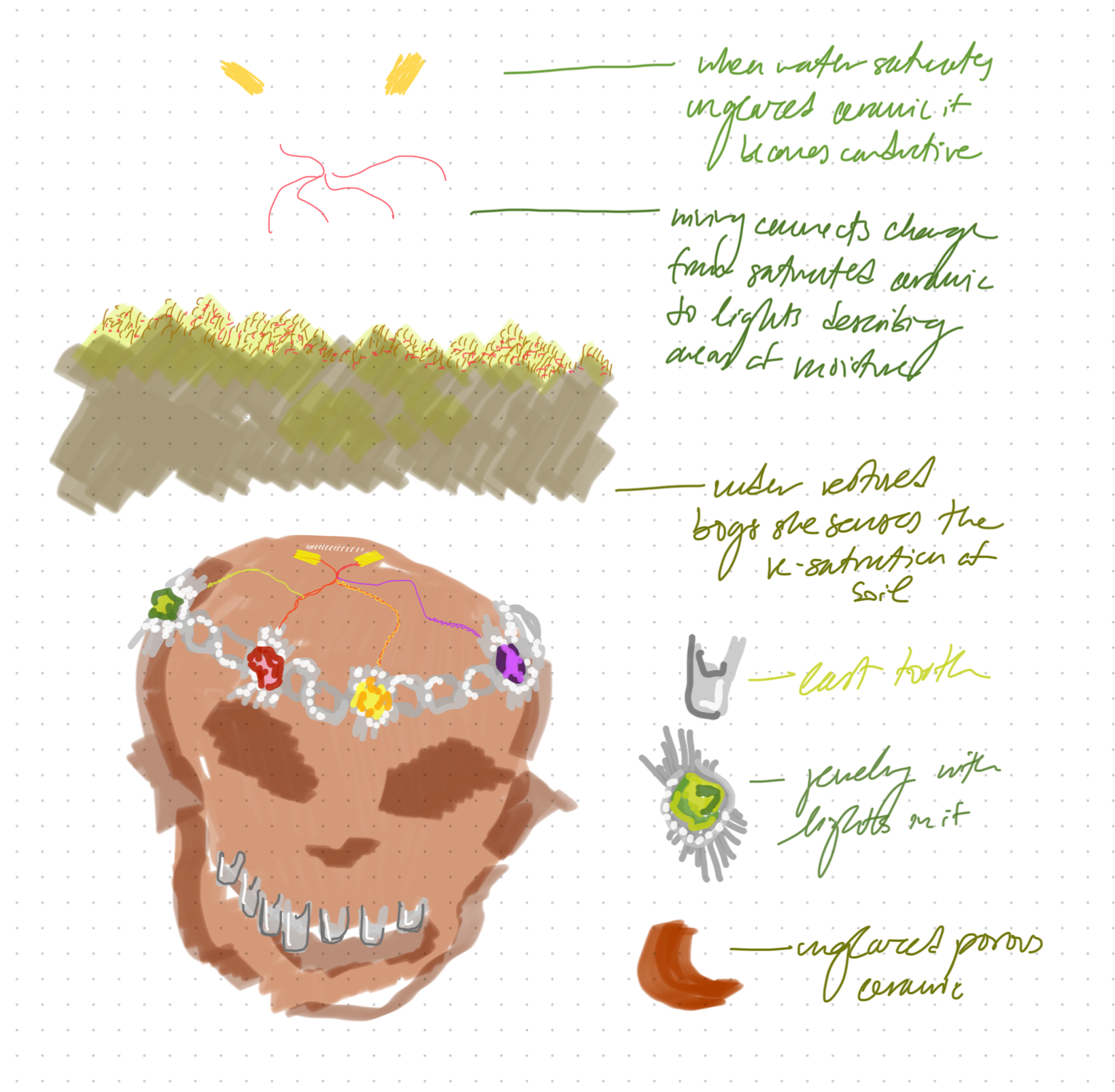
Second Idea: an artistic ceramic soil moisture sensor inspired by Seamus Heaney's Bog Queen.
Too much an (impractical) art object, too sculptural and not enough electronics.
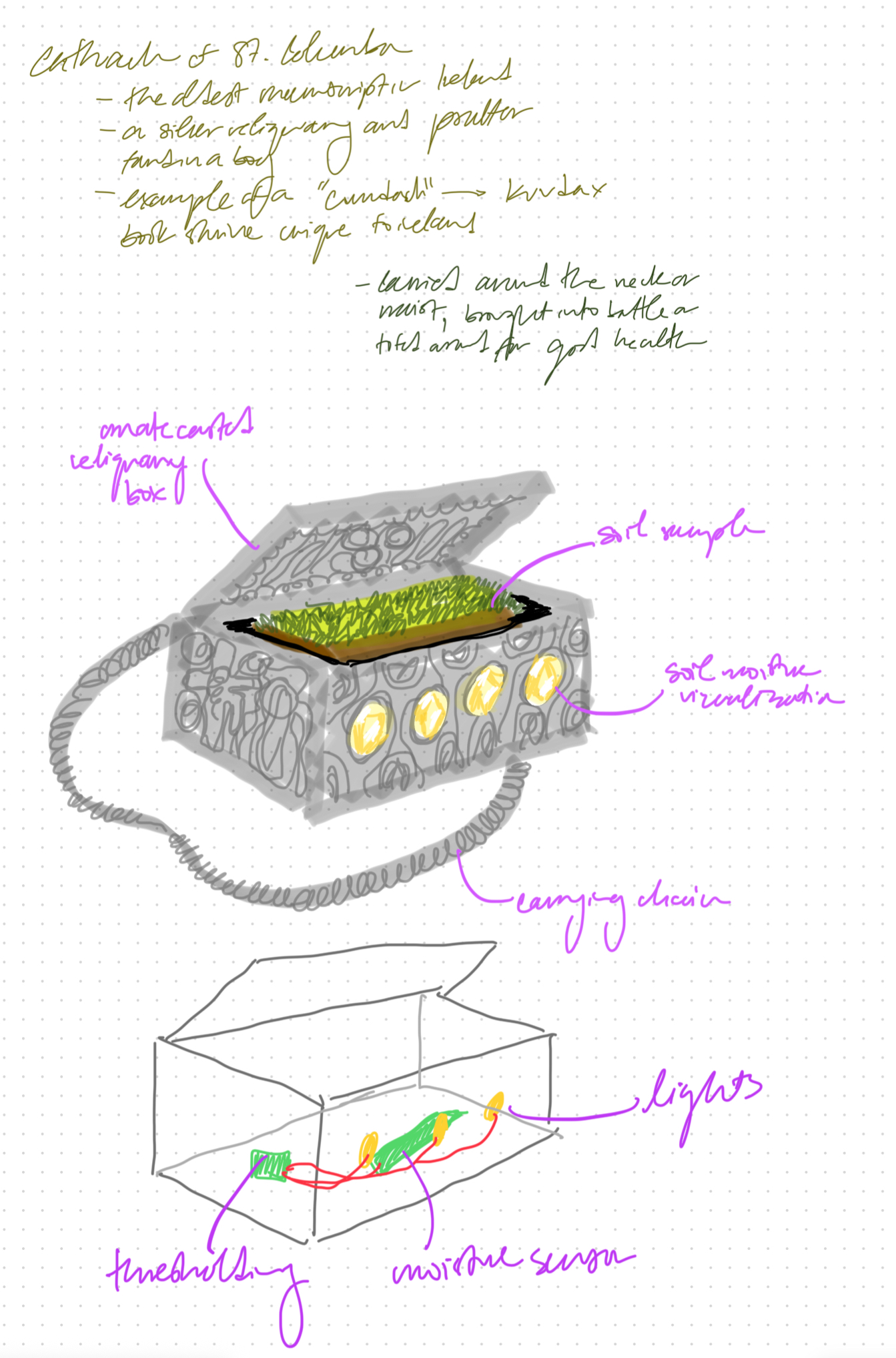
Third Idea: a mobile soil sample analysis kit in the style of a cumdach
decorative psalter or holy book case, designed for wear around the neck.
Heavy, impractical, too reliant on metalworking skills we may not be focused on in the class.
Finally I arrived at a concept that I think can work. I was running in the woods near my house when I came to this concept, and I aborted my run to walk home with an armful of sticks.
Here are the sticks:
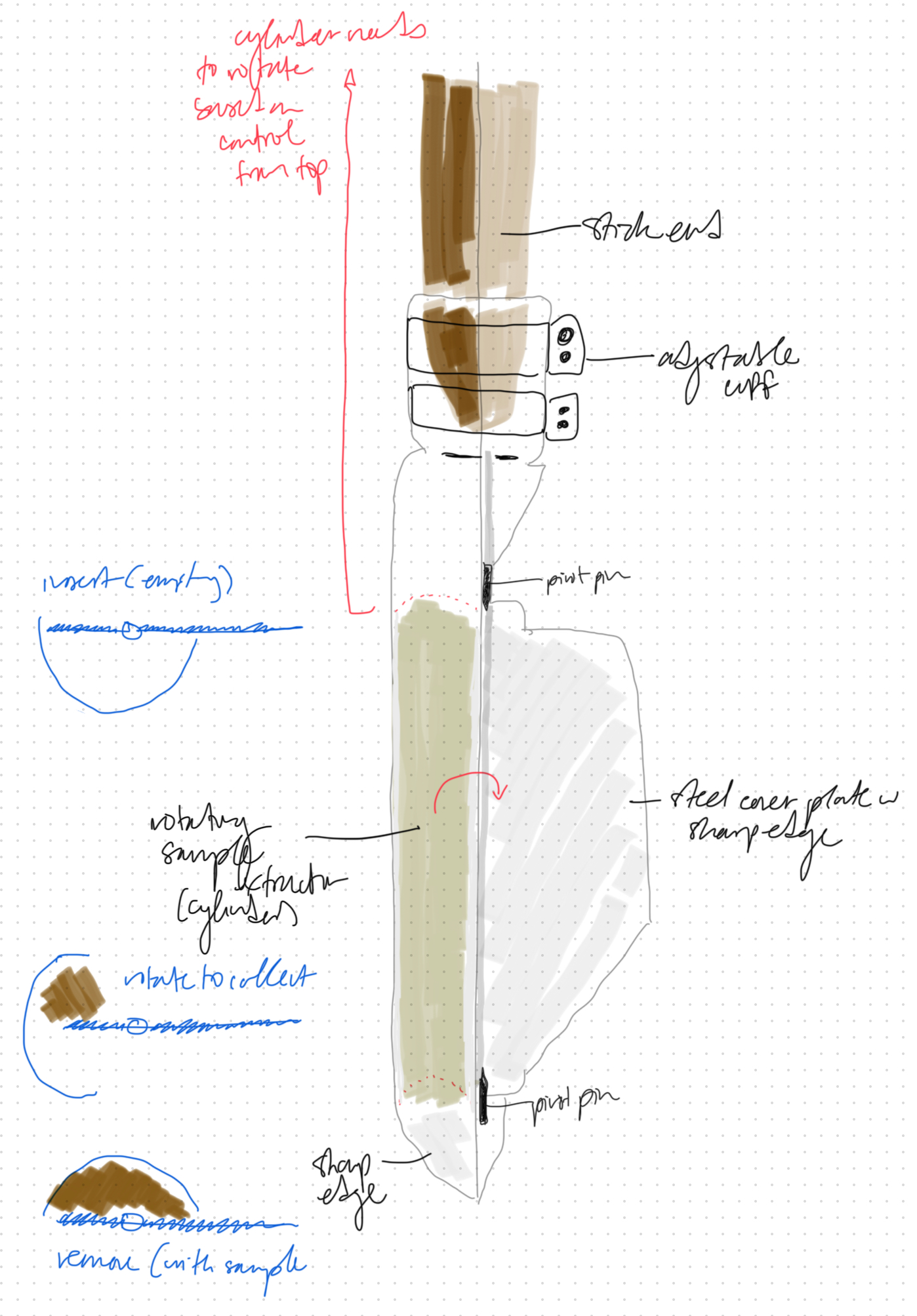
And here is the concept:
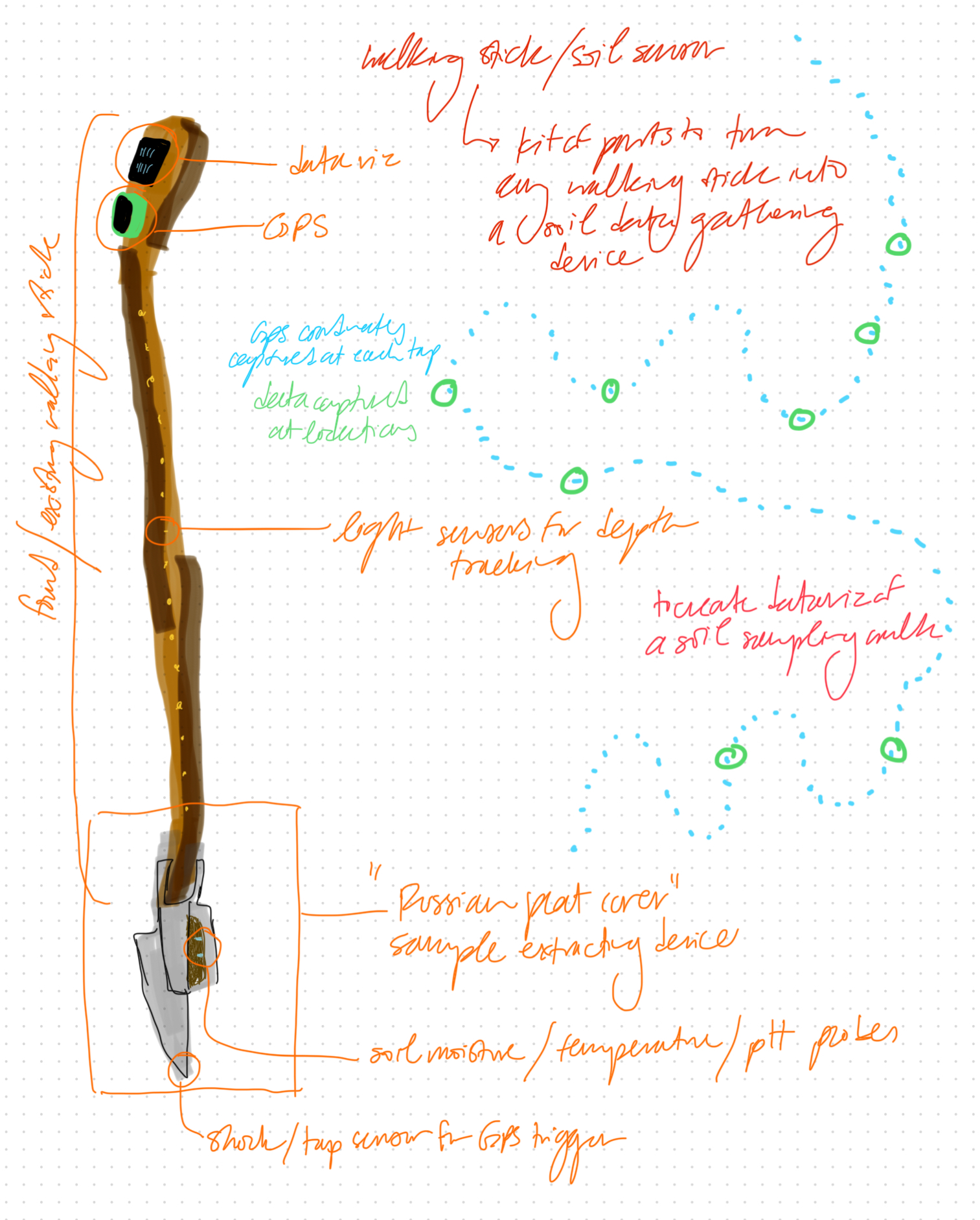
The objective is to create a walking stick that can act as a soil moisture sensor. It relates to the traditional material cultures of the slean and the shillelagh. Perhaps we call it the "slean-elagh."
I watched various videos of peatland soil monitoring by ecologists and found that it often involves vertical elements that drill into the soil, and hand-recording
of location and sensed data. I thought with some creative electronics and machining, these could be integrated-- and better, decoupled from PVC fabrication.
My aspiration is to create a walking stick that, on each tap of the end of the stick on the ground, captures a GPS position. At its bottom, it has a version of the
Russian Peat Corer that can take soil samples, and the soil mosture data can be recorded at the relevant coordinates.
I imagined that with light sensors positioned along the length of the stick it might be possible to capture the depth of the soil sample also.
Here is the really hard part that I hope will be possible: in an ideal scenario, this is not a single integrated device but rather a kit of parts that can be
applied and removed from a found stick, thereby turning any walking stick into a soil sensor. I look forward to discussing the feasibility of this project with course staff!
CAD
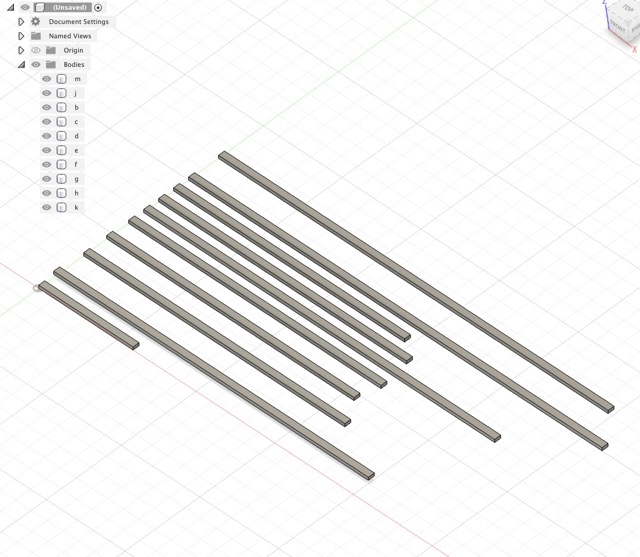
I started the CAD process by entering an excruciatingly laborious process of trying to model a working Strandbeest (bogbeest) leg, which involves creating narrow dowels / boxes aligned together at precise angles with tiny holes that all have rotation joints in them. It was unpleasant but a useful introduction to Fusion.
I created a series of bars for the leg components:
And then I used parametric constants to create identical holes in each of them:
I also learned to create as-built joints so that the holes would rotate together (though I did not model a physical part to achieve this). One observation here is that the regular "joint" in Fusion did not work for the purposes of free motion around other joints chained together; it had to be the "as-built joint."
Here is the creation of those joints:
After a day or two of painfully working on beest-leg while still rethinknig my final project idea, I decided to abandon it and follow the soil sensing stick "slean-elagh" described above.
I suppose this is an example of spiral development, in the sense that I made it to a point in the process that had a natual breaking point (my patience) and used it to reevaluate and course-correct.
To model the slean-elagh I used various of the Fusion functions discussed in class, primarily to create two components which are the . These included:
Cutting a shape along a curve:
Lofting shapes together:
Fillet-ing for rounded edges:
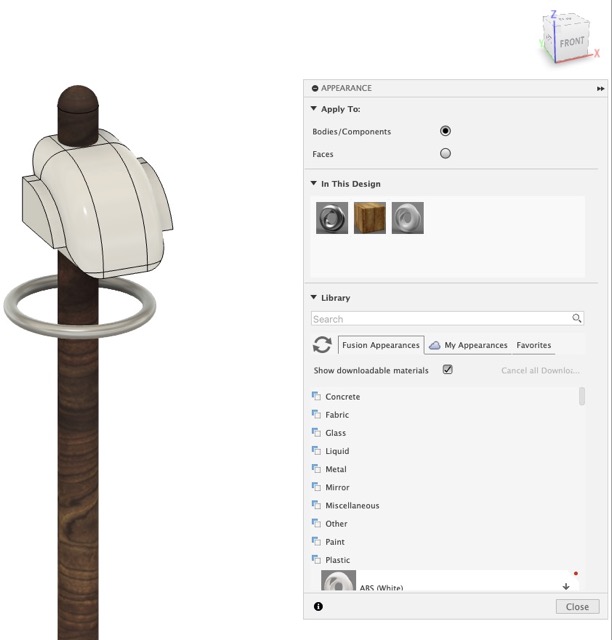
I also added materials to the volumes in Fusion:
And I put a joint on the peat-corer component so that it could functionally rotate. The way this is supposed to work is that the corer is driven into the soil with the chamber against the flat plate, so that it stays empty.
At the desired depth, it is turned around to the other side of the plate, capturing soil that can then be drawn up to the surface. Here is the joint:
The problem is that usually this is driven by an attached vertical member with a crossbar at the top-- but I want this to be a removable stick. Lacking the engineering knowledge to find a different way to "drive" the corer,
I added the only rotation element that came to mind which is a steering wheel... (lol?). Maybe there is a special part that can allow the stick to rotate, or another better solution here that a mechanical engineer can help me discover.
With my rendered, jointed, and visualized object I exported a .obj and brought it to Blender.
Rendering
My goal in rendering was to show the object's use, how it would go into the soil and capture something. Unfortunately, I did not manage to retain the motion of the peat corer in Blender; in hindsight this may have been possible to do using an .FBX file (according to this Reddit conversation), but it was too late to re-import by the time I understood this.
Therefore, I was able to capture only the largest scale motions needed, in a basic environment. I started by bringing in an image of someone standing in a bog as a surface intersecting the object:
I then used keyframes to animate the motion of the object across that surface:
Combined, these create the following rendering. I struggled to get the actual "Render" engine to produce something that looked like this (even after moving the camera around extensively) but the concept is there:
Trials and Tribulations
Following are some observations of the process this week, and some challenges or disappointments to record:
Spent too long overthinking my ideas before starting the technical part of the assignment; however, I did save myself time by abandoning the doomed quest of the bogbeest, and this required refinement of the idea.
Spent a great deal of time learning how to model functional joints in Fusion, but I could not get my joint to rotate correctly in Blender, so they don't show up in the renderings. I think this is a file format / transfer problem that I did not have the time to fully fix.
Added materials in Fusion that also had to be re-done in Blender.
Had a lot of trouble with the Blender "Render" engine that never seemed to quite record what the editing windows showed...
Initially ssh into the course gitLab was not working no matter what I did to the config, but somehow the git clone did work, and now here I am!
Learnings and Progress
Below is the delta between where I started on the skills for this week and where I arrived:
Had absolutely never used Fusion but became relatively comfortable there. So far I prefer it to Rhino.
Had experienced Blender roughly once in my life; I don't feel comfortable with it yet but do understand the logic of how it works (mostly).
Very excited about my Final Project idea; target acquired.
Resources and Acknowledgments
This week I had several conceptual conversations with my husband Jack and my friends Agnes and Aubrie to shape the final project direction.
I found this image compressor app for web (Mac) and this one for video (also Mac) that were useful and fast.
I found this Fusion video and this Blender video helpful.
Design Files
Here is my Fusion model .obj
and Here is my Blender .blend.

 And then I used parametric constants to create identical holes in each of them:
I also learned to create as-built joints so that the holes would rotate together (though I did not model a physical part to achieve this). One observation here is that the regular "joint" in Fusion did not work for the purposes of free motion around other joints chained together; it had to be the "as-built joint."
Here is the creation of those joints:
After a day or two of painfully working on beest-leg while still rethinknig my final project idea, I decided to abandon it and follow the soil sensing stick "slean-elagh" described above.
I suppose this is an example of spiral development, in the sense that I made it to a point in the process that had a natual breaking point (my patience) and used it to reevaluate and course-correct.
And then I used parametric constants to create identical holes in each of them:
I also learned to create as-built joints so that the holes would rotate together (though I did not model a physical part to achieve this). One observation here is that the regular "joint" in Fusion did not work for the purposes of free motion around other joints chained together; it had to be the "as-built joint."
Here is the creation of those joints:
After a day or two of painfully working on beest-leg while still rethinknig my final project idea, I decided to abandon it and follow the soil sensing stick "slean-elagh" described above.
I suppose this is an example of spiral development, in the sense that I made it to a point in the process that had a natual breaking point (my patience) and used it to reevaluate and course-correct.
 And I put a joint on the peat-corer component so that it could functionally rotate. The way this is supposed to work is that the corer is driven into the soil with the chamber against the flat plate, so that it stays empty.
At the desired depth, it is turned around to the other side of the plate, capturing soil that can then be drawn up to the surface. Here is the joint:
The problem is that usually this is driven by an attached vertical member with a crossbar at the top-- but I want this to be a removable stick. Lacking the engineering knowledge to find a different way to "drive" the corer,
I added the only rotation element that came to mind which is a steering wheel... (lol?). Maybe there is a special part that can allow the stick to rotate, or another better solution here that a mechanical engineer can help me discover.
With my rendered, jointed, and visualized object I exported a .obj and brought it to Blender.
And I put a joint on the peat-corer component so that it could functionally rotate. The way this is supposed to work is that the corer is driven into the soil with the chamber against the flat plate, so that it stays empty.
At the desired depth, it is turned around to the other side of the plate, capturing soil that can then be drawn up to the surface. Here is the joint:
The problem is that usually this is driven by an attached vertical member with a crossbar at the top-- but I want this to be a removable stick. Lacking the engineering knowledge to find a different way to "drive" the corer,
I added the only rotation element that came to mind which is a steering wheel... (lol?). Maybe there is a special part that can allow the stick to rotate, or another better solution here that a mechanical engineer can help me discover.
With my rendered, jointed, and visualized object I exported a .obj and brought it to Blender.