Final Project
The core idea is how can I make a robot that morphs from a organic looking object. The inspiration for this comes from the tree hopper family of insects. Here are some pictures of them.



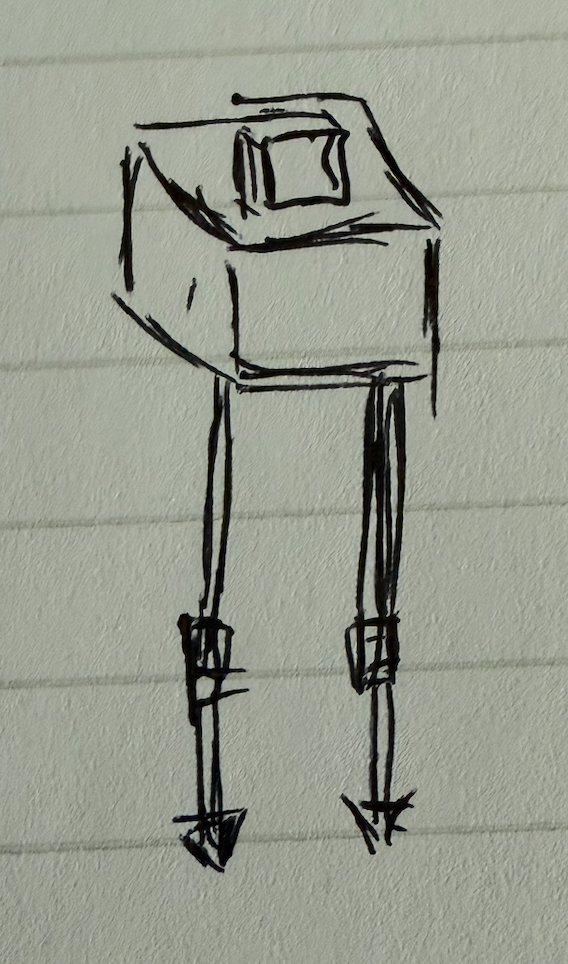
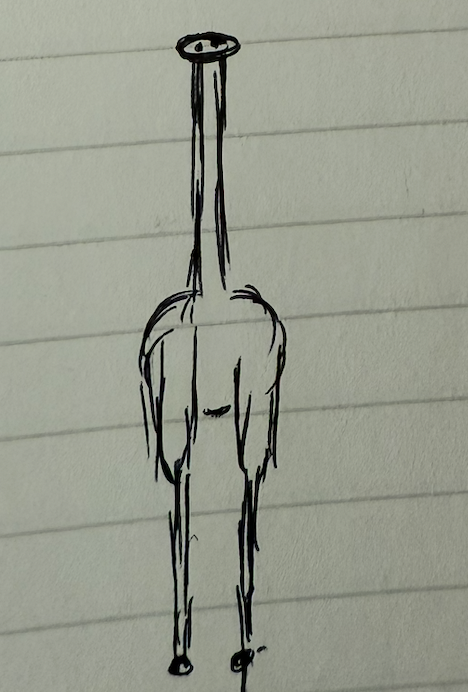
With their legs contracted some of them have very elegant organic shapes. What I want to explore is, can we build a robot that when contracted has an organic shape, but when expanded it is an intricate legged robot. One important detail is in the tree hoppers, the legs are tucked under the main body, in my project I want to challenge myself and think about the starting shape to be be fully broken so that when the robot is moving, it isn’t carrying the shape on its back as in the treehopper’s case. I want to work on 2 legged objects, that also make the robot stand tall when fully extended. This is a bit unlike an insect and more ostrich like. The goal is to utilize as much of the space as possible to unfold, so need to explore interesting mechanical structures, and also i want to have the robot be expressive so it needs enough DoF, and the ability to walk slowly, but nothing athletic. Robot ostrich hatches from its egg.
Looking at leg designs
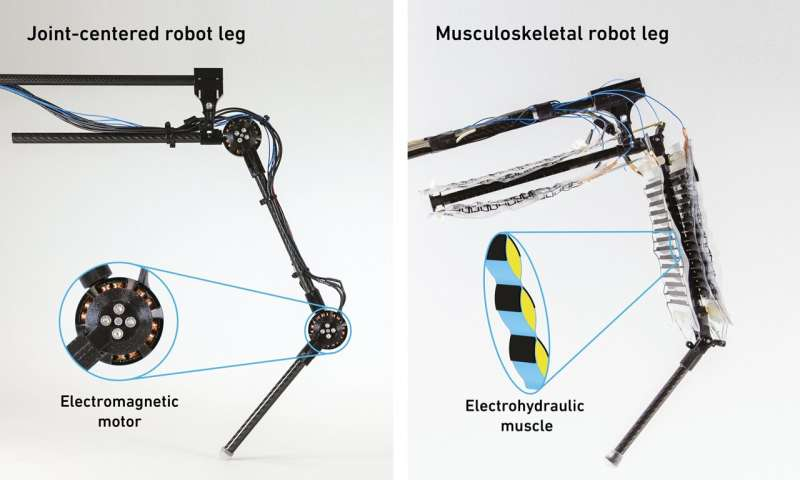
https://techxplore.com/news/2024-09-robot-leg-powered-artificial-muscles.html
MIT Cheetah Diagrams
https://fab.cba.mit.edu/classes/865.18/motion/papers/mit-cheetah-actuator.pdf
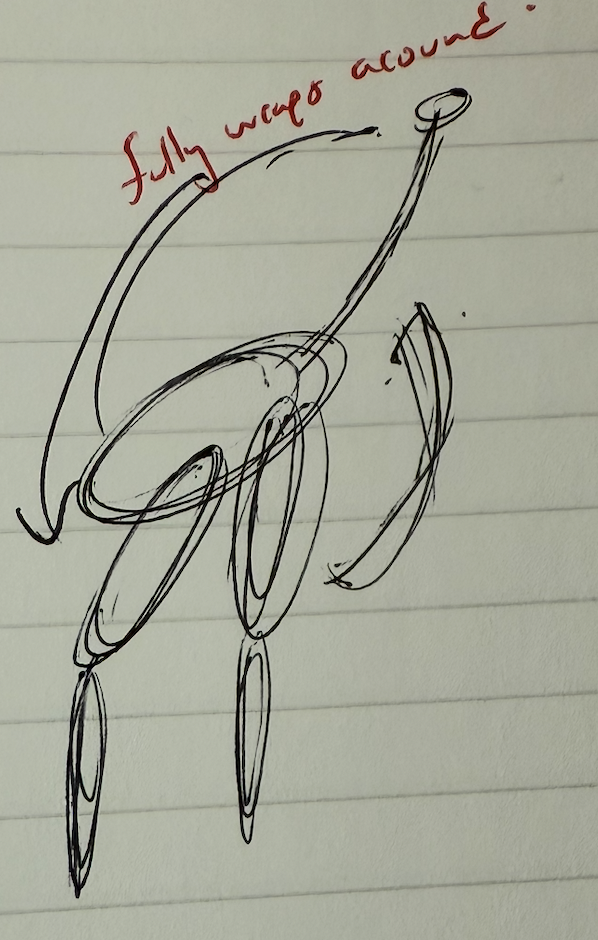
I was trying to sketch some ideas of forms. For now given the constraints on how leg designs are typically made, I have arrived to the following design.
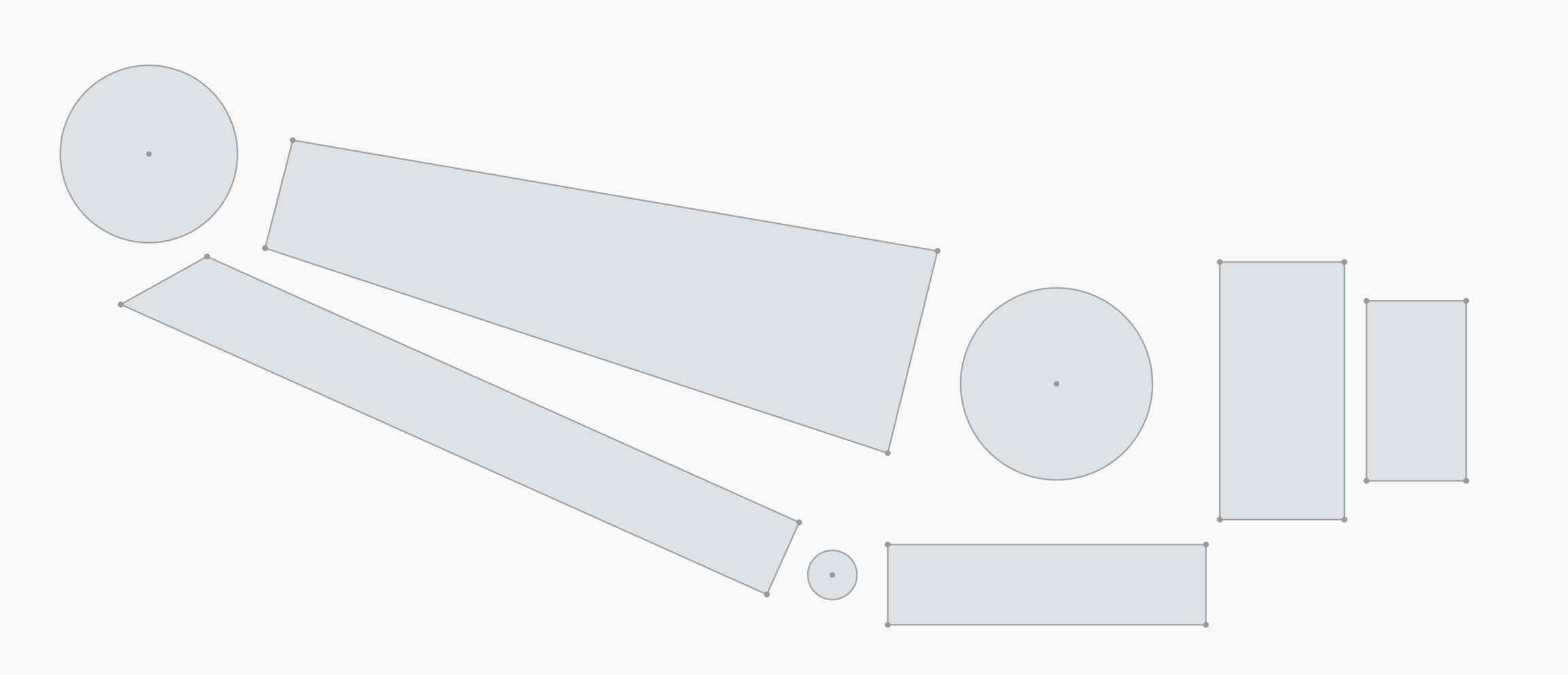
I made a rough 2d Layout in OnShape. The circles are the joints, i can potentially house the motors there. Then you see the 3 links for the leg, and finally the two rectangles on the right are the body and head. I want the head to be expressive, and also have some dof. This is in the folded form so I ideally want it to collapse into a shell so you can’t see the internals when its collapsed.
Log Sept 23
- I had a meeting with Anthony to go over my final project plan. He provided useful feedback on how 3D printing would be more stable than laser cutting wood.
- We then went over different actuators - BLDC with gear box + encoder or servo. I ended up doing some research and getting a drone brushless motor with a low KV would be a high torque solution. But then I would need to make a gear box and add an encoder - and I think that is going to take up too much time.
- I bought this (arriving Thursday) - https://www.amazon.com/ZOSKAY-Brushless-Digital-Arduino-45KG-180°/dp/B0DD7QQJ86/ref=ast_sto_dp_puis?th=1