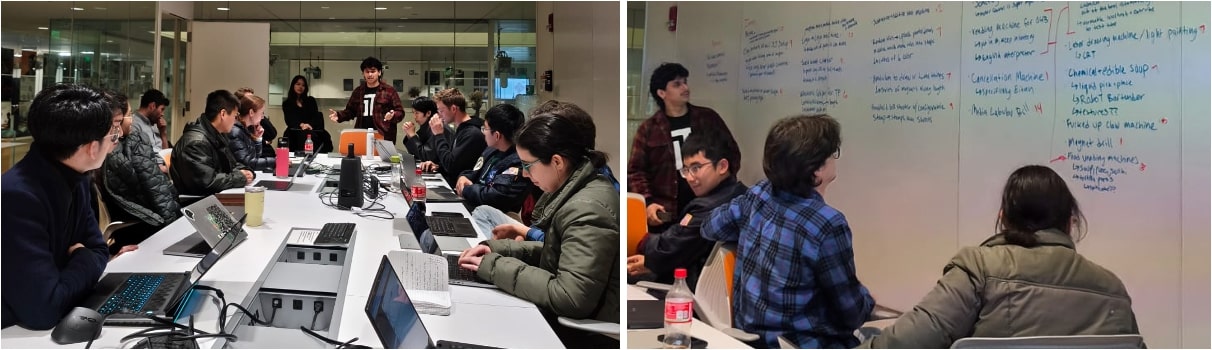
The CBA team met up for several brainstorming sessions early on to come up with ideas for what machine we wanted to make. After going through everyone's ideas, voting for our favorites, and fleshing them out more, we landed on making the Neilbot. Essentially, this was to be a 20-sided contraption where each side was a face (Neil's face) that could be pushed out, perhaps as a way to make the icosahedron roll throughout the building or do an interesting dance.
I worked as part of the MechE subteam and contributed in various ways throughout the ideation, design, builds, tests, and documentation. Several of the contributions I made did not ultimately end up being incorporated into the final design, but many did. Early on, I designed and 3D printed a wireframe of a tetrahedron to give people a sense for what the unit cell would look like during early stages. I did this using learnings from this tetrahedron-making tutorial and this wireframe-making tutorial.

I also helped brainstorm methods by which the faces would be removable, suggesting magnets initially and then ultimately realizing that velcro would be perfect for this application.

I cut many of the steel rods for the initial icosahedron build and ground them after being taught by Charlie.

I then assembled this early prototype with Ceci by pushing the rods into the joints she had designed and 3D printed. We also helped it take its first steps (see video below).

After talking with Ceci to understand what else was needed, I then came up with some methods for attaching the "triangle window" to the rods with some help from Dan, which included cutting out thin sheets of metal and bending them around the rods instead of using fasteners alone. However, after getting input from Alfonso and calling for an all-hands meeting, the team collectively decided to scrap the rods idea and instead pivot to using the Zund to cut out aluminum composite triangles that would serve as the icosahedron's frame. This voided the attachment mechanisms I developed, and we moved on with this plan.
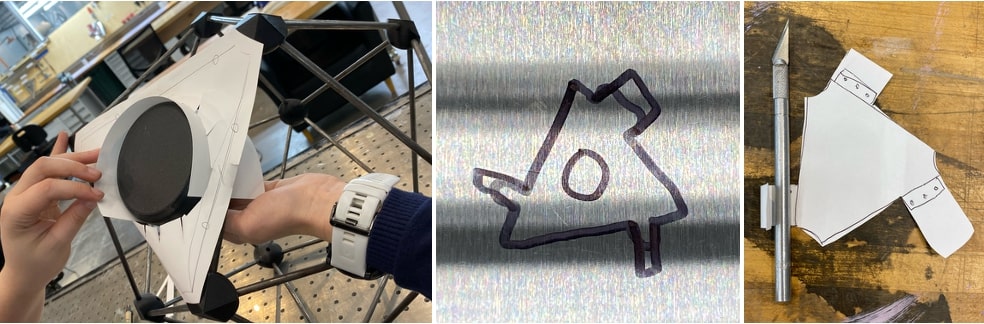
After discussing next steps with many of the others on the MechE subteam and getting material from Alfonso, we decided we wanted to laser cut the "triangle windows" I had been working on out of acrylic. Ceci designed these, and after getting a refresher on how to use the Thunder Laser laser cutter from Colin, I laser cut one out. I confirmed with other team members that the dimensions came out as expected, screws fit correctly, and the design was suitable for mass-production, and then I proceeded to cut out the remaining 19 out of two sheets of white acrylic. I left room at the bottom for Ceci to later laser cut the smaller triangles needed for the inner icosahedron.

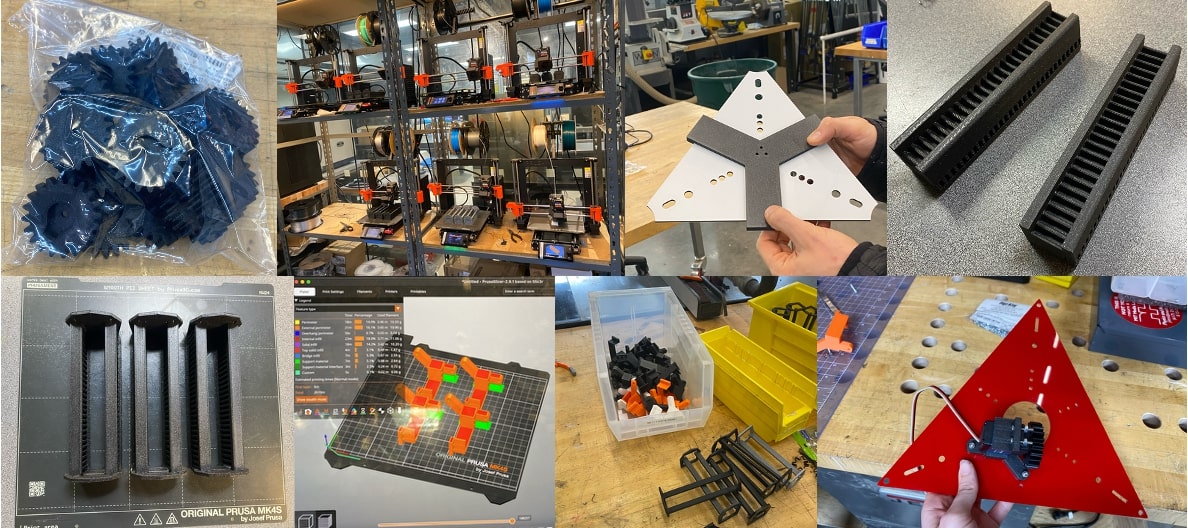
When Huanyu realized that the mold design he had would be too big to print on the resin printers, I found some ABS filament he could use to print it instead. We discussed him potentially using IPA to smooth the surface, and he tried it out at his lab later on. The initial crank and piston design Jacqueline made needed some modifications, so I added some screw holes to align with the holes in the acrylic and aluminum composite triangles and then 3D printed them for other team members to reference. I also printed out a couple of Jacqueline's parts in the basement (the piston) since her prints kept having poor adhesion to the build plate in the Mars Lab printers. This was a recurring issue, so I ended up being the go-to 3D printing person and had many prints running throughout the last few days of the week.

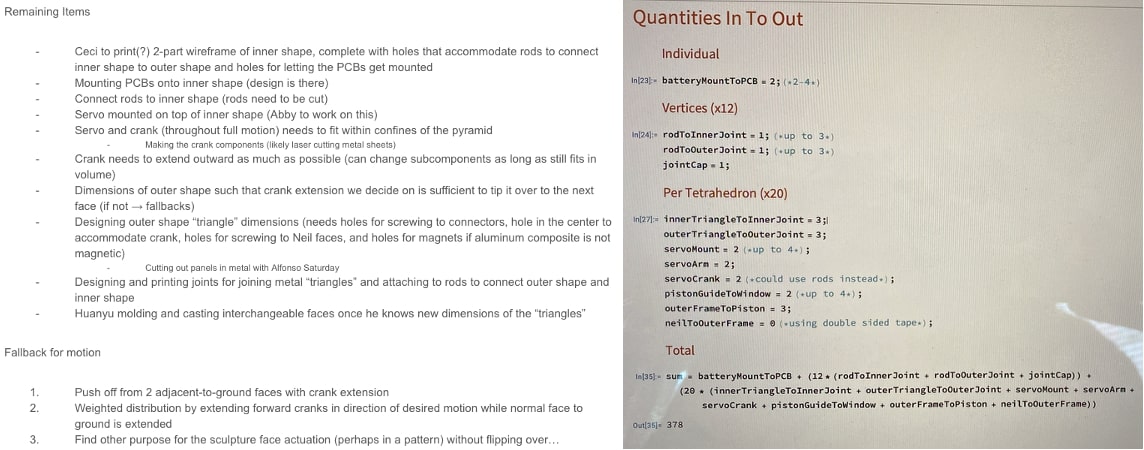
I also, together with Eitan, did a lot of concrete identification of next steps and encouraged everyone to have a unified model of what we were aiming for. A screenshot from some of that initial work is on the left. We also did a variety of logistical tasks together, like figuring out how many screws we would need based on the design at the time. This image on the right is a bit outdated, since later iterations ended up using two or three screws rather than the original one we initially accounted for based on earlier designs.
Ben and I identified some issues with later iterations of the design, and we tried out using heat set inserts for the piston. We also noticed that the alignment of the outer acrylic triangle ("triangle window") and aluminum composite triangle were misaligned and used this realization to systematically list out remaining to-be-solved issues. Given that the initial crank design was posing a lot of difficult-to-solve issues (including causing misalignment that led to snapping the inner acrylic triangle the motor was attached to during my test with Ben), the team collectively decided to move forward with a rack-and-pinion design spearheaded by Abby and Ben.

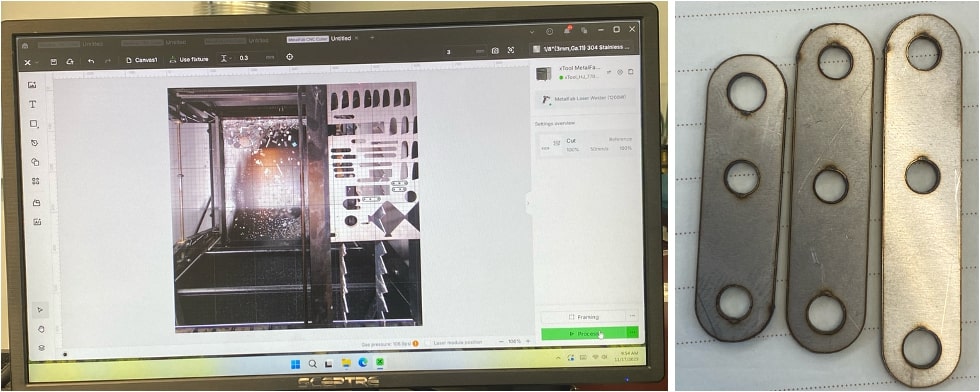
I used the Metal Fab to laser cut a few differently-sized crank components Jacqueline wanted to test out with her original design to confirm that, even with those modifications, this new direction still made the most sense.
Next I 3D printed the rack-and-pinion parts Abby and Ben designed once I received them. This turned into me 3D printing almost all of the racks, pinions, and motor mounts for the team, providing replacements in the case that anything broke and printing one-offs of things like the guide for drilling holes into the aluminum composite faces. I also helped with removing supports after they were printed. I helped with assembly of various components, including attaching the motors to the system, which I'm holding in the image on the bottom right.
Dimitar and I played large roles in the video, being Alien 1 and 2, respectively. We did a lot of filming with Eitan for this. I highly recommend you check it out. I also, along with Ceci, kicked off the MechE subteam's documentation efforts. We wrote up an information-rich first draft and added in a bulleted timeline for others to go through and formalize as our group's documentation. Here are our group's short film and machine building documentary.

This week the design files are largely distributed between different members of the CBA group and most of the ones I worked on ended up being re-modified by others or passed up in favor of new directions. To find these and more complete documentation on the final project, please refer to our Neilbot group page. I'll include the early tetrahedron wireframe CAD file in case you're interested.