Development Process
I developed three separate web-based control interfaces to operate the icosahedron robot remotely. Each interface served different control needs and use cases for the team.
I focused on creating intuitive, reliable control interfaces that the team could use to test and demonstrate the robot's capabilities. The software team was incredibly generous with their time in helping me understand concepts and techniques.
Interface Features
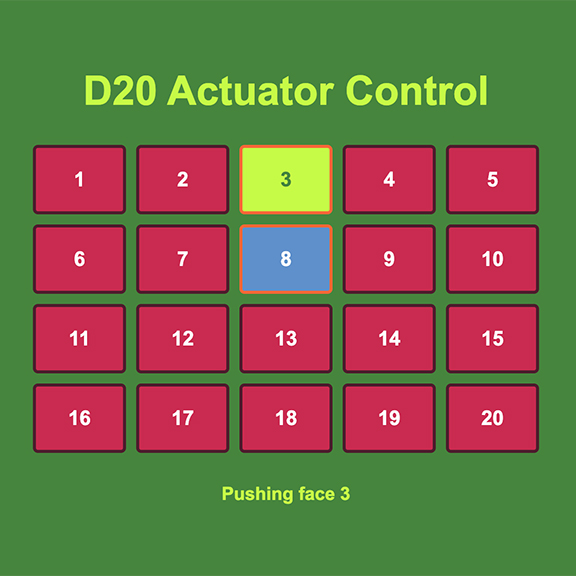
Interface 1: Primary control dashboard for basic extension control of individual faces
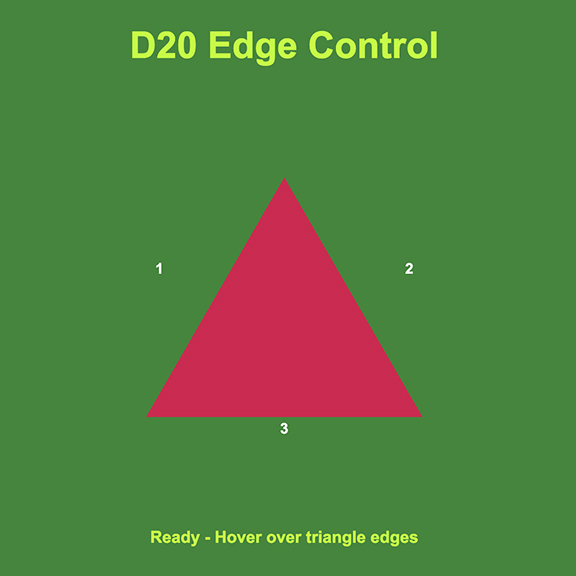
Interface 2: Triangle control panel to select the direction of movement
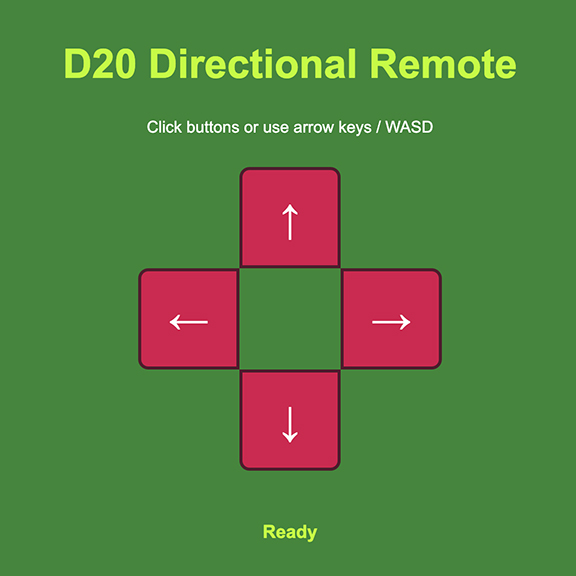
Interface 3: Operation control in forward, backward, left, and right
Files:
Download Control Interface 1 (.html)
Download Control Interface 2 (.html)
Download Control Interface 3 (.html)