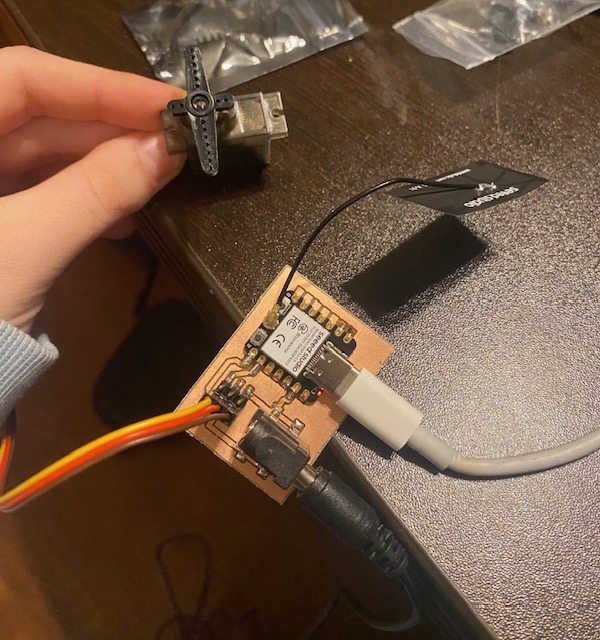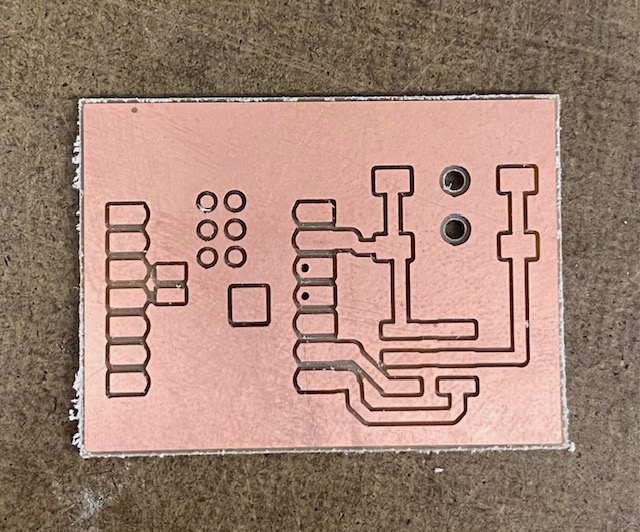
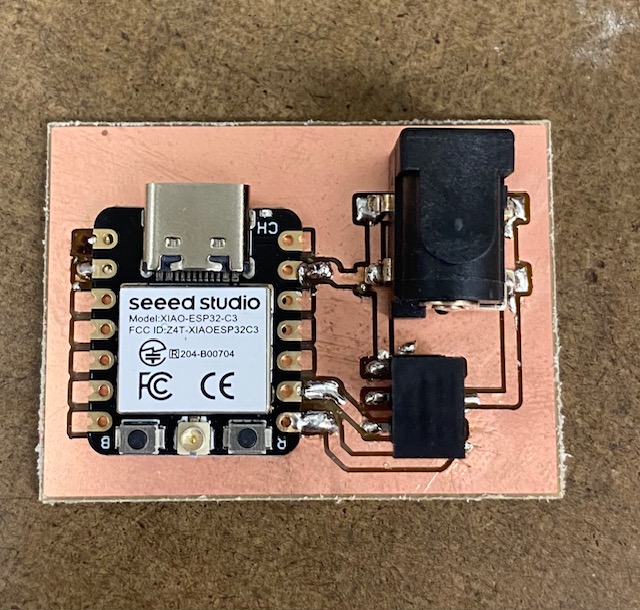
For this assignment, I wanted to simply control a servo motor through wifi. In previous weeks I've used only RP2040's so I designed a simple board that connects an Xiao ESP32C3 to two servos and a barrel jack connector. I then milled the board on the Roland and soldered on the components. While milling the tape came unstuck in the cut operation, so I manually removed the board from the copper piece. That is why the edges of the board are not super clean.
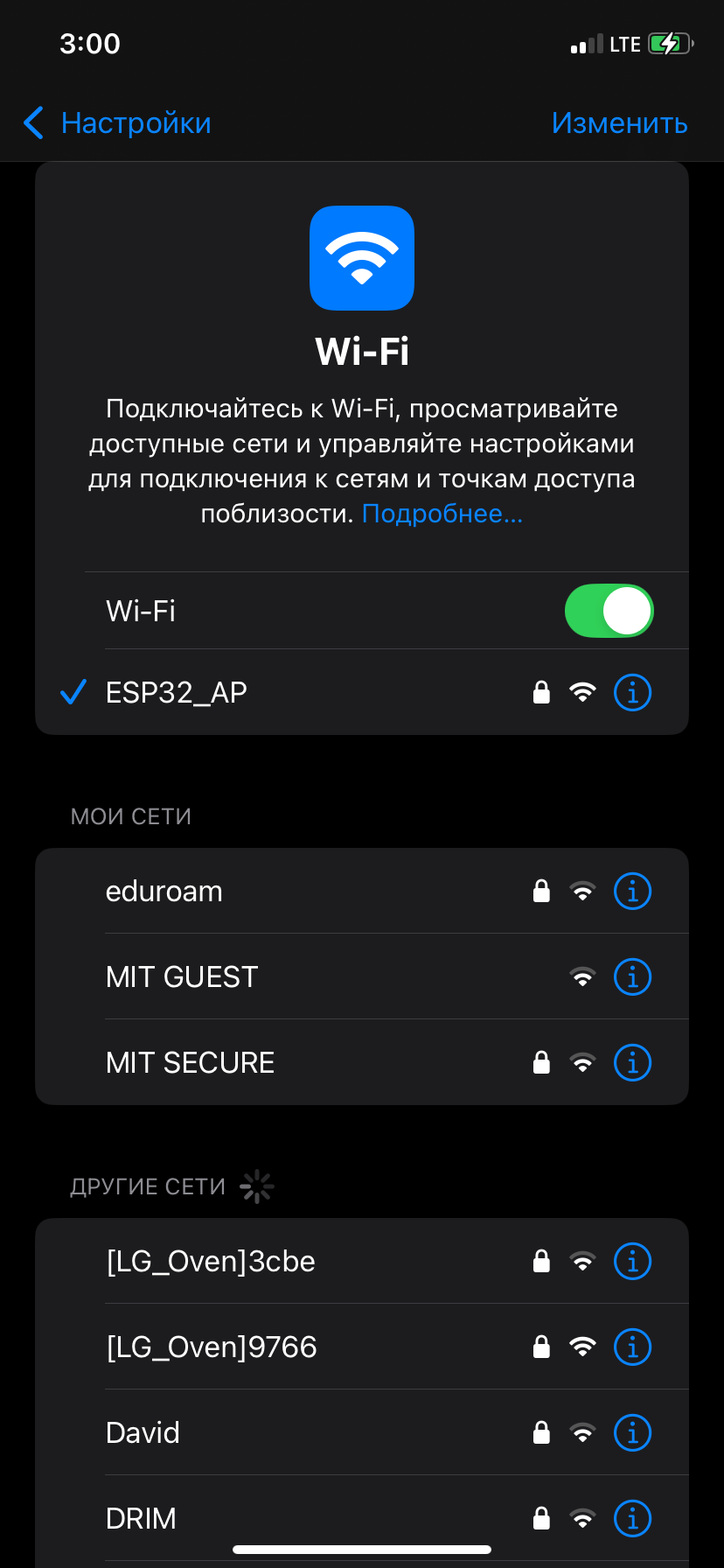
For the code I asked chat gpt to write code that will create a server where I could control the servo off my phone. To control the servo, all I needed to do was connect to the ESP's wifi and type in the server into my phones address bar. I was able to successfully control the servo.