Let's formally define the basis functions:
$$ \varphi_i= \begin{cases} \frac{x-(hi-h)}{h}=\frac{x}{h}-(i-1) & h(i-1)\leq x < hi\\ \frac{(hi+h)-x}{h}=(i+1)-\frac{x}{h} & hi\leq x < h(i+1)\\ 0 & {\rm otherwise} \end{cases} $$We can plot a $\varphi_i$ and its two neighbors for a step size $h=1$:
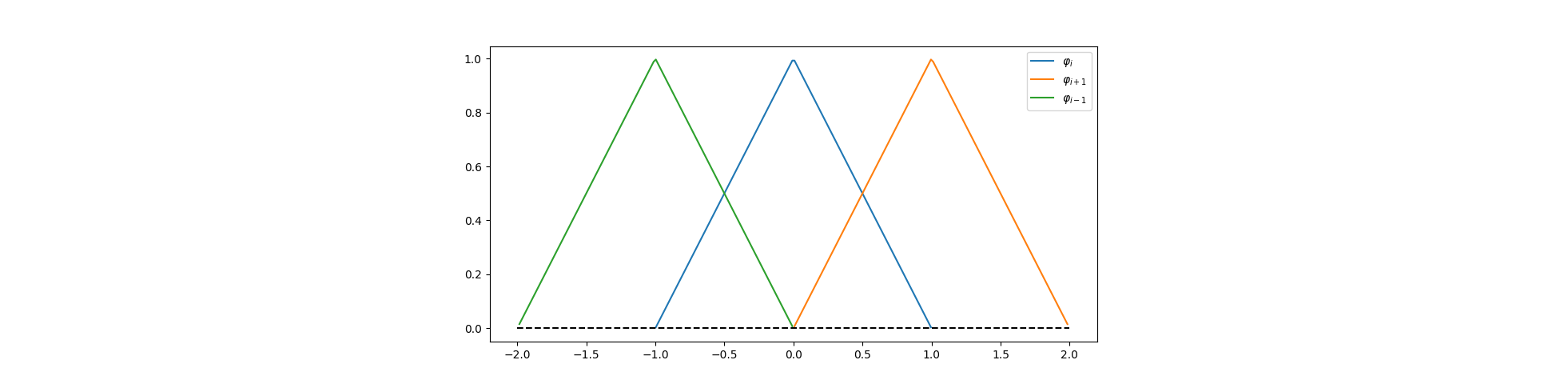
A single hat only interacts with its two direct neighbors. Therefore, matrix $A$ only has three active diagonals, and needs to be symmetrical. The two cases are:
$$ \begin{cases} A_{ii} = \int \varphi_i^2 {\rm d}x = 2\int_0^h \left(1-\frac{x}{h}\right)^2 {\rm d}x = \frac{2}{3} h\\ A_{i(i+1)} = \int \varphi_i \varphi_{i+1} {\rm d}x = \int_0^h \left(1- \frac{x}{h}\right) \frac{x}{h} {\rm d}x = \frac{1}{6}h \end{cases} $$We can also compute $B$ in the same way, but it involves second order derivates, which is definitely an issue with a function with a non-continuous first derivative. We can still give it an attempt by using Dirac impulses:
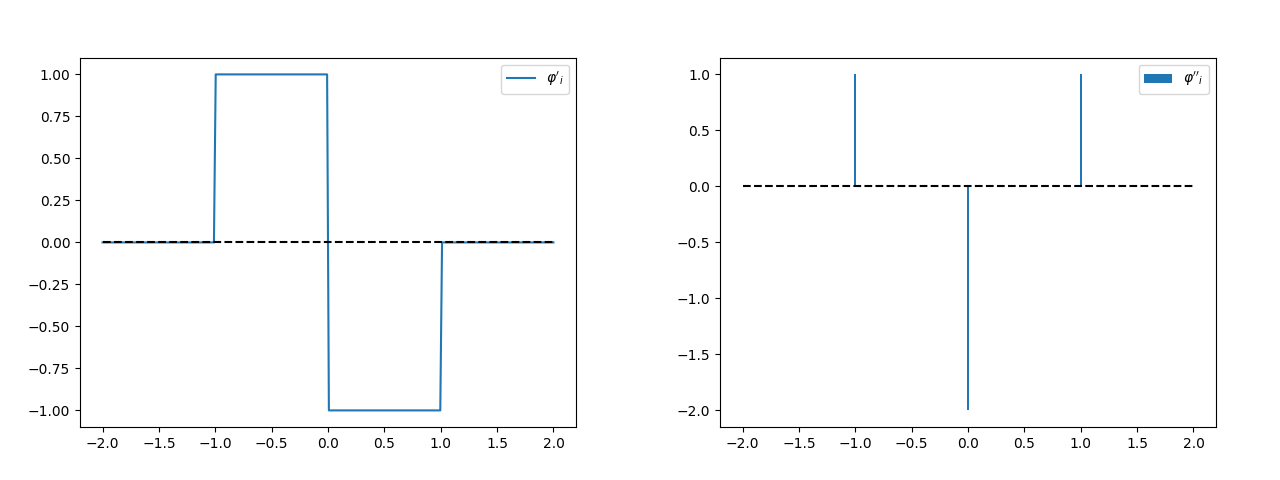
$$ \varphi'_i = \begin{cases} \frac{1}{h} & h(i-1)\leq x < hi\\ -\frac{1}{h} & hi\leq x < h(i+1)\\ 0 & {\rm otherwise} \end{cases} $$$$ \varphi''_i = \frac{1}{h}\delta \left(x-h(i-1) \right) - \frac{2}{h}\delta \left(x-hi\right) + \frac{1}{h}\delta \left(x-h(i+1)\right) $$Let's plot the first and derivative, representing a Dirac impulse by its norm:
This lets us compute $B$, using the properties of $\delta(x)$:
$$ \begin{cases} B_{ii} = -\gamma \int \varphi''_i \varphi_i {\rm d}x = - \frac{2}{h} \varphi_i(hi) = -\frac{2}{h}\\ B_{i(i+1)} = -\gamma \int \varphi''_i \varphi_{i+1} {\rm d}x = \frac{1}{h} \varphi_{i+1}(h(i+1)) = \frac{1}{h} \end{cases} $$