
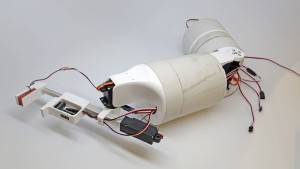
Modular Robot – Fully Assembled
For demoing the application, I demonstrated the positioning of the robot, the pressure sensitive gripper and the capability for scanning objects. This is all done with the modular design, all parts are detachable and reconfigurable.
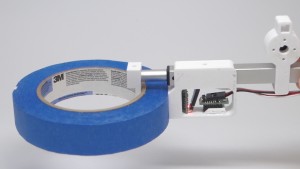
Linear Gripper
I used a compact linear actuator by Firgelli, it is both fast and strong. It is much lighter than my previous design, which requires 2 servos.
Reconfigurable Modular Robot
PVC pipe is a strong and cheap material for making the body of the modular robot. You can cut them into desire length for your application or have a few different length to swap out.
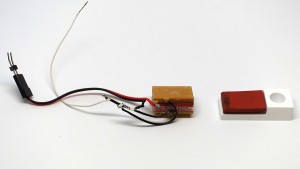
Compact Capacitive Pressure Sensing
For my robotic gripper, I want to make a small and compact Capacitive Pressure sensor but it turns out to be a little harder than I expected.

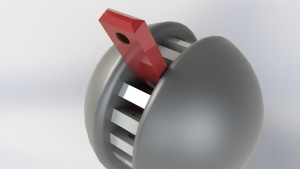
Twist-on Join
The joins for the modular robot would provide the physical linkage and the power, possibly date as well. The twist join provides a secure and firm join for the robotic body.

Wireless Communication with ESP8266
ESP8266-03 is fairly simple to use however there is a huge latency issue using the Http’s Get request. The chip stops running the program when you send too many requests all at once. For realtime application, this is probably not ideal.

Measurement
Using a camera with head position detection, I was able to create parallax effect for positioning a remote camera, like looking through a window. I used Arduino Yun on Wifi, WebRtc, and head tracker.js. It was quick as easy!

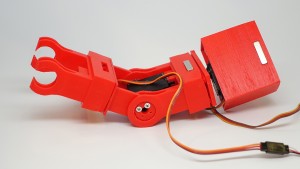
Closed-Loop Control System
For my closed loop control system, I would like to monitor the pressure on the grabber to vary the grabbing speed of my grabber. The grabber would then play “fetch” with me with the robotic arm.

Manipulation & Processes
For this week I explore jamming, milling, suction cup, gripping (with sensors). I also made improvements on the mechanical mechanism for robotic body, attaching and detaching modules and pan the tilt platform.

Motion
There two major mechanisms of the modular self assembling robot that I want to add motion to, the grabber and the self locking join. I did not focus on the grabbing function, but I could improved it by adding pressure sensors or current sensing circuit in the future.
Mechanisms
Design, model, and prototype the operation of mechanisms for my modular robots. Click / Snap on (Magnet) + Data & Power Connection (Pogo Pins) + Stiff Linkage + Detachable (solenoid)
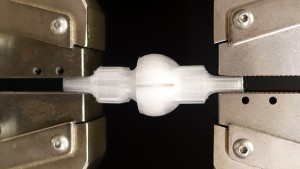
Materials
Measure the stiffness and strength of a structure, and relate it to the material properties. My goal was to design a flexible join out of 3D printed material, PET. It should be strong enough to hold a certain weight and at the same time easy to take apart, assembled and reassembled.
Self-Reproduction
Model the operation of a self-reproducing machine, think about how that might work, and in part this is an exercise in more advanced modeling of the motion as well as the design of a mechanism.

Capability & Application
“Technology, then, is not an irreducible first cause; its social effects follow from the social causes that brought it into being: behind the technology that affects’ social relations lie the very same social relations. Little wonder, then. that the technology usually tends to reinforce rather than sub‐ vert those relations.”