For this week I started to work on my robotic self reckoning plotter. I focused on the mechanism that puts the marker (Sharpie in this case) up and down using a Cam and Follower mechanism.
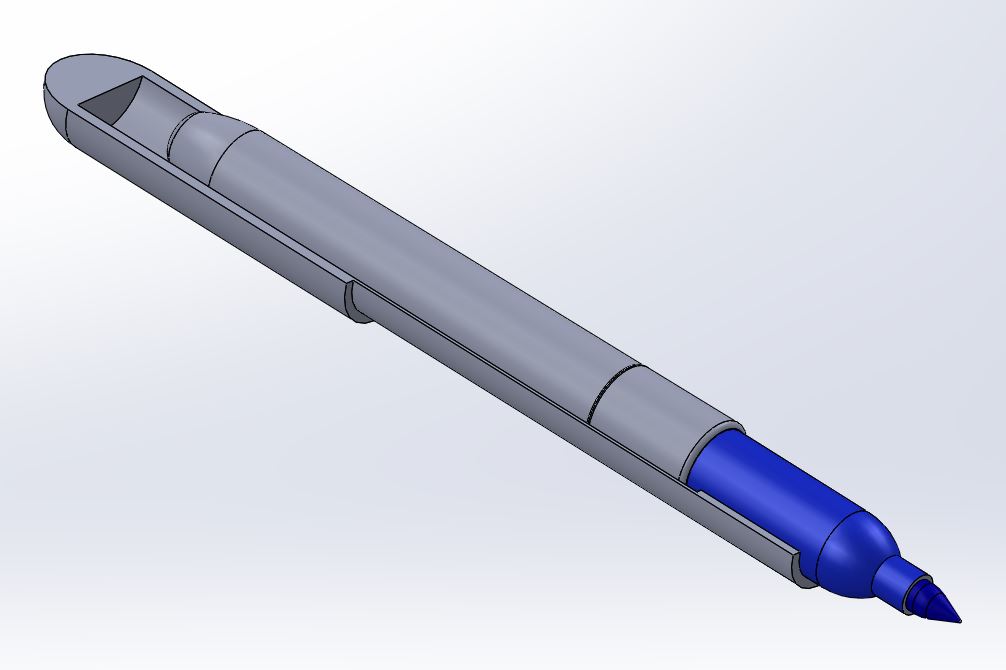
Sharpie Holder
I 3d printed a holder for the Sharpie which also serves as the follower. It's made out of two equal parts that constrain the sharpie with room for a spring so that the sharpie can apply preasure and have some vertical wiggle room. (TODO: add spring to the design)

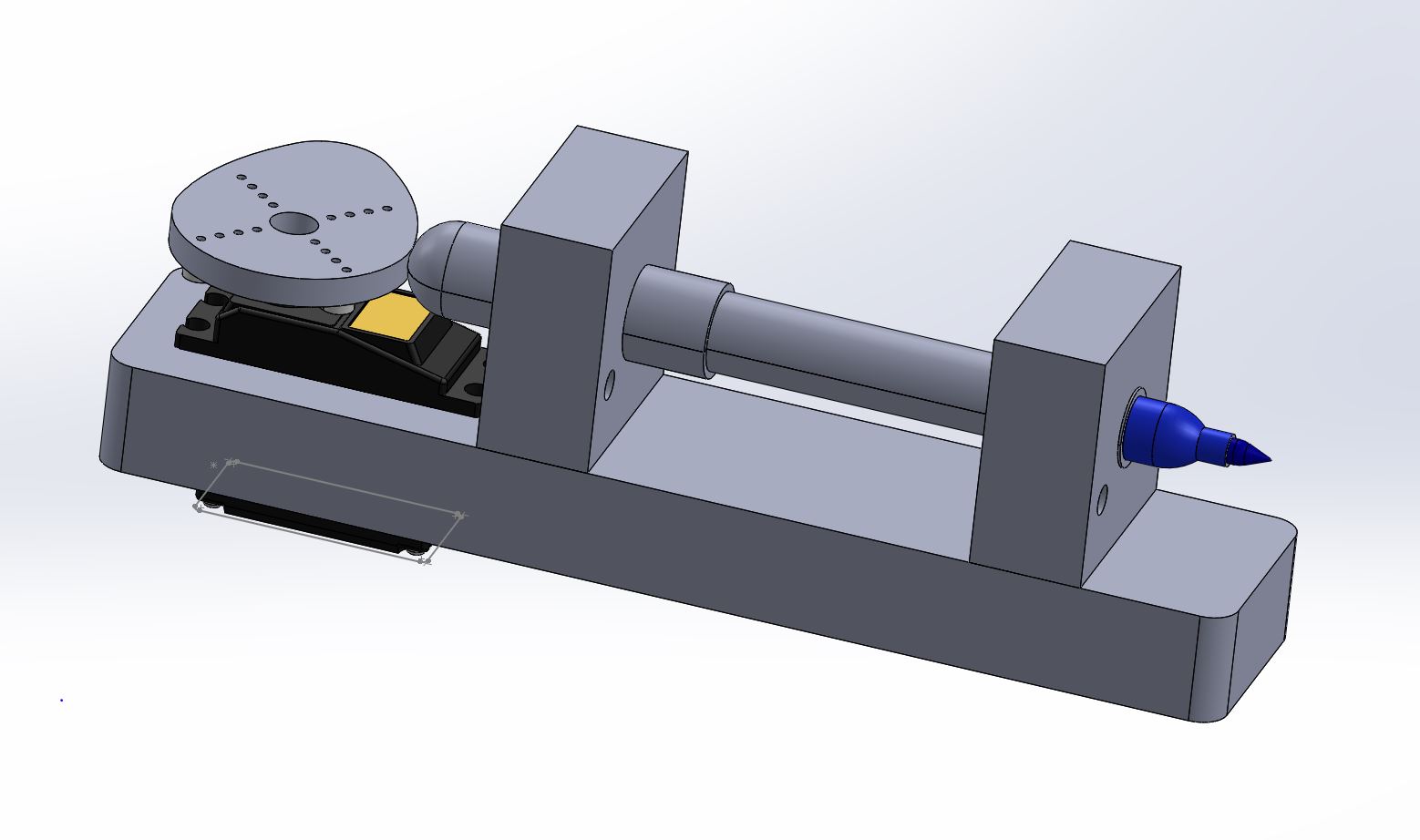
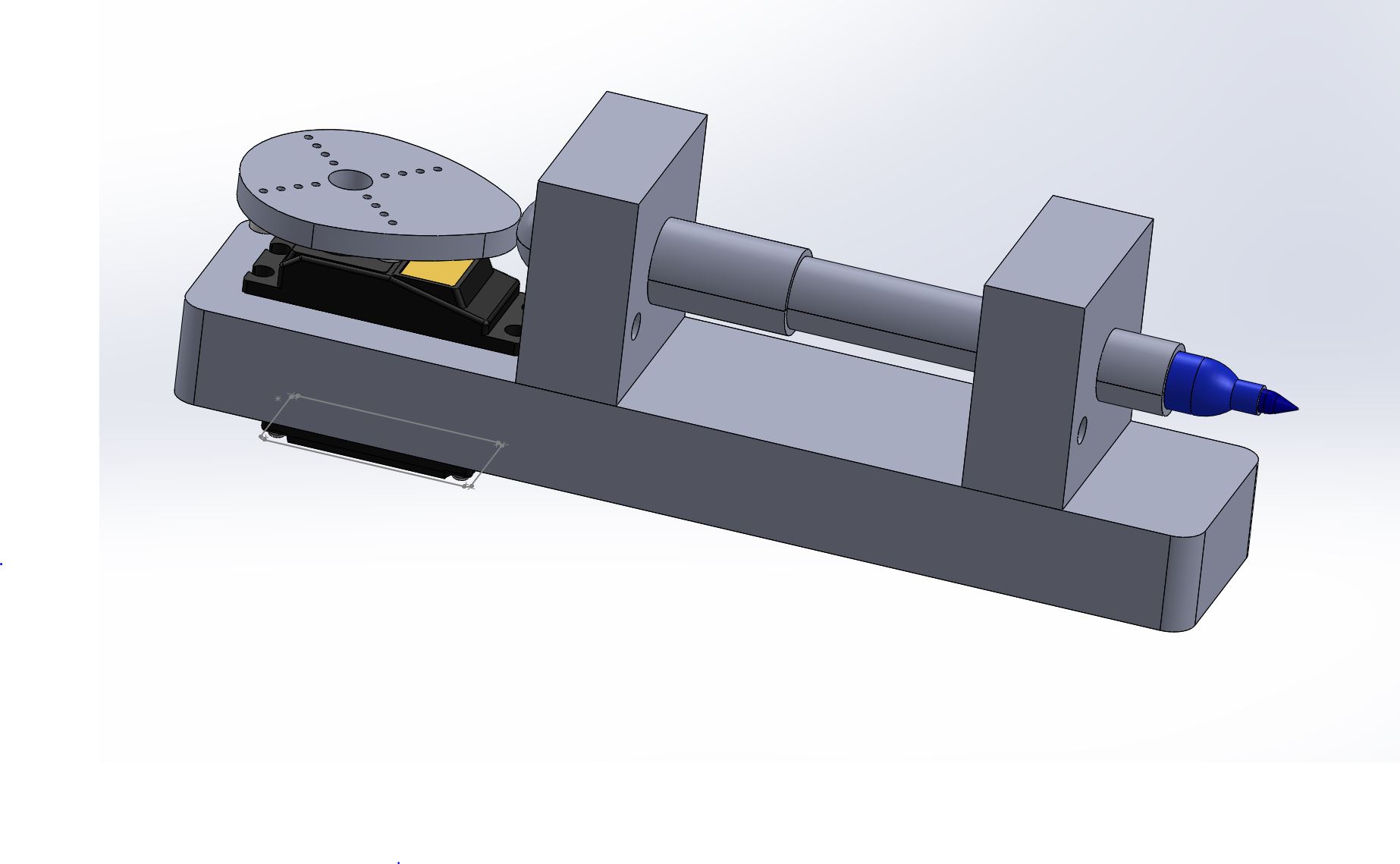
Cam and Follower
The mechanism is based on an SG5010 Servo. All construction materials are from the CBA shop scrap. (TODO: add spring to design)

However, the spring was a bit tight and the cam was not powerful enough to move it. I had to shorten it and "manually" loosen it up.
Issues
- Cam needs a lot of force to push the follower. I should tweak the cam design and add a wheel to the follower.
- Through hole mounts are not aligned. For the next iteration I will press-fit the parts together.
- More clearances for the through hole. Had to some sanding this time.
- Avoid 3d printing as much as possible. Iteration time is not managable.