INTRODUCTION
This semester as MAS865 project I developed the instrumentation for the wind tunel I made for MAS863. I was missing a nice sensing balance to be integrated to the structure.
I took the path of trying to only order the components I cant manufacture in a semester termn. I was googeling weight balances for wind tunnels (as they must be as less intrusive as possible, the design gets tricky.)
Also I noticed that a bunch of them just integrated the off the shelf load cells into their design and, to bee a sensing platform, that seems like a lot DOF..
That brought interesting questions as:
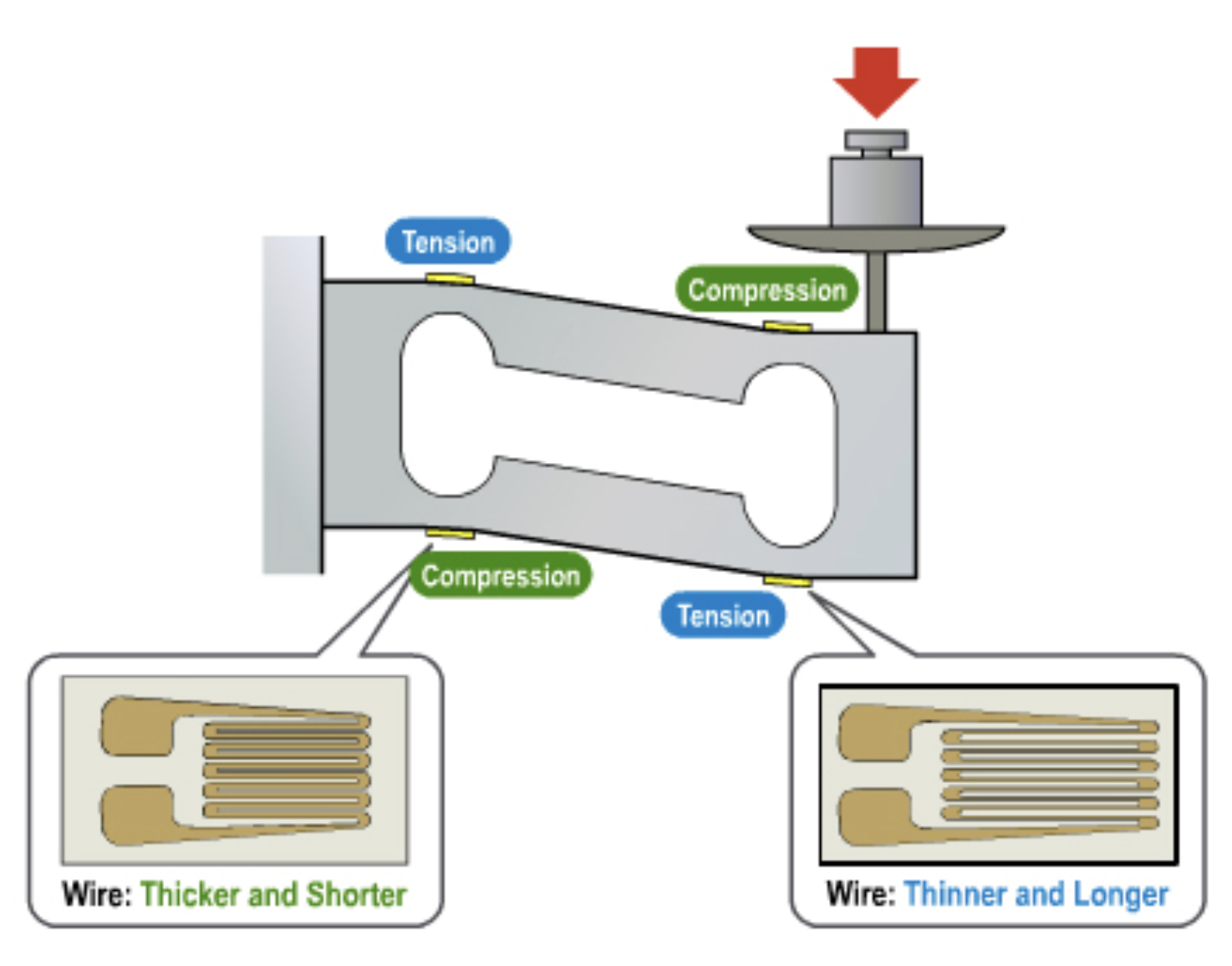
Can I make a fast and manufacturable ,ideally in a Fab Lab, structures with flexure based deformations to
be used also as load cells?
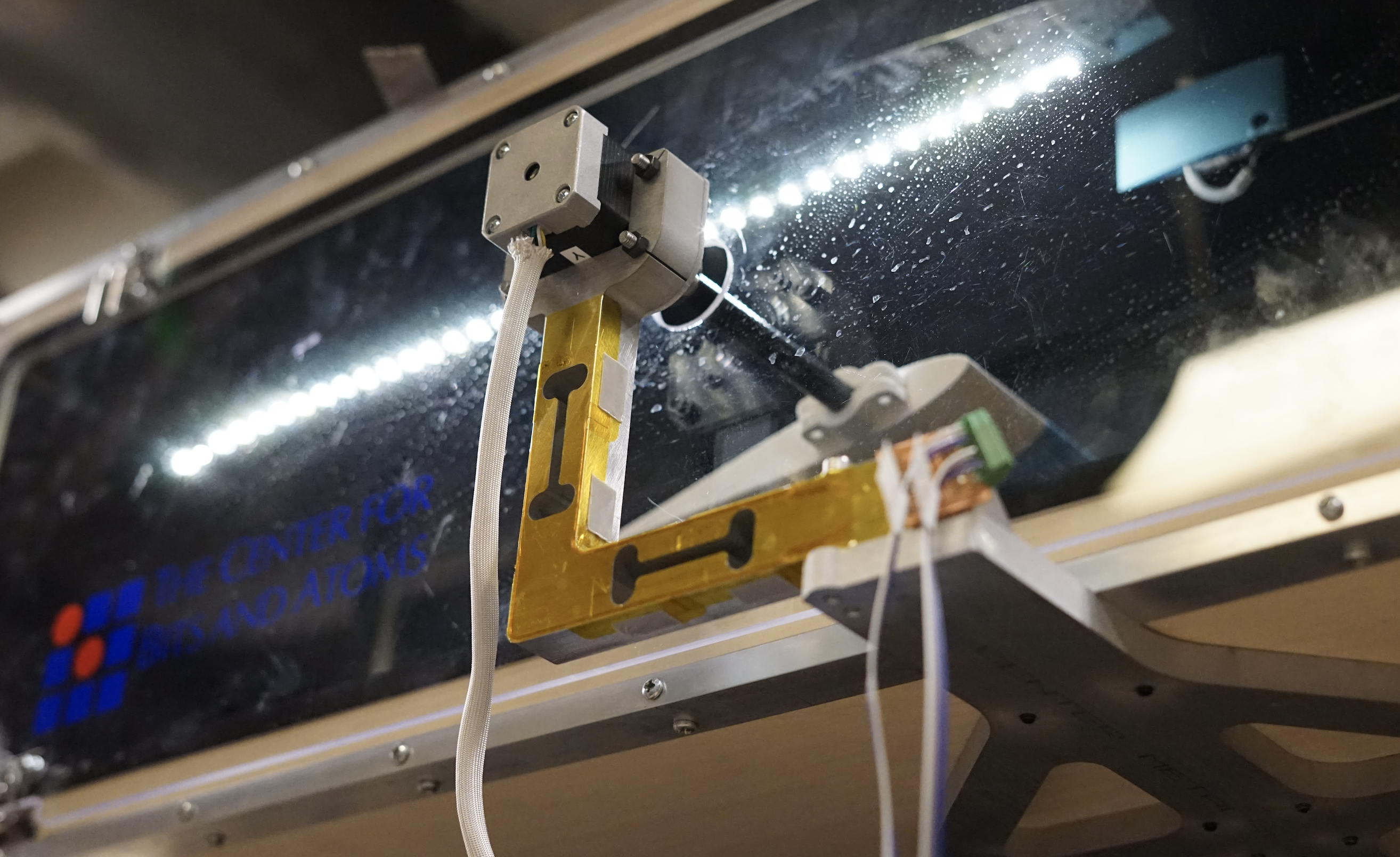
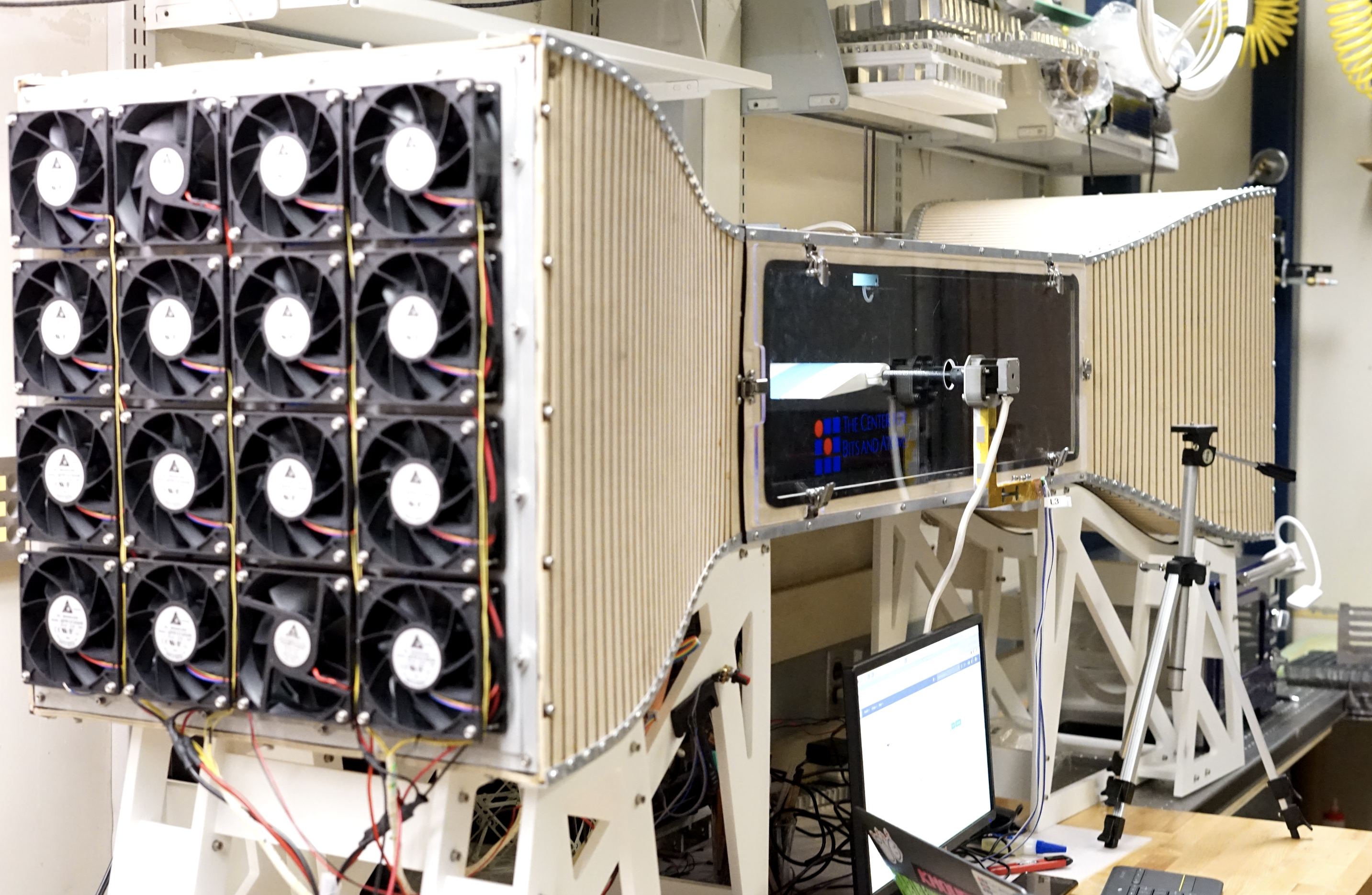
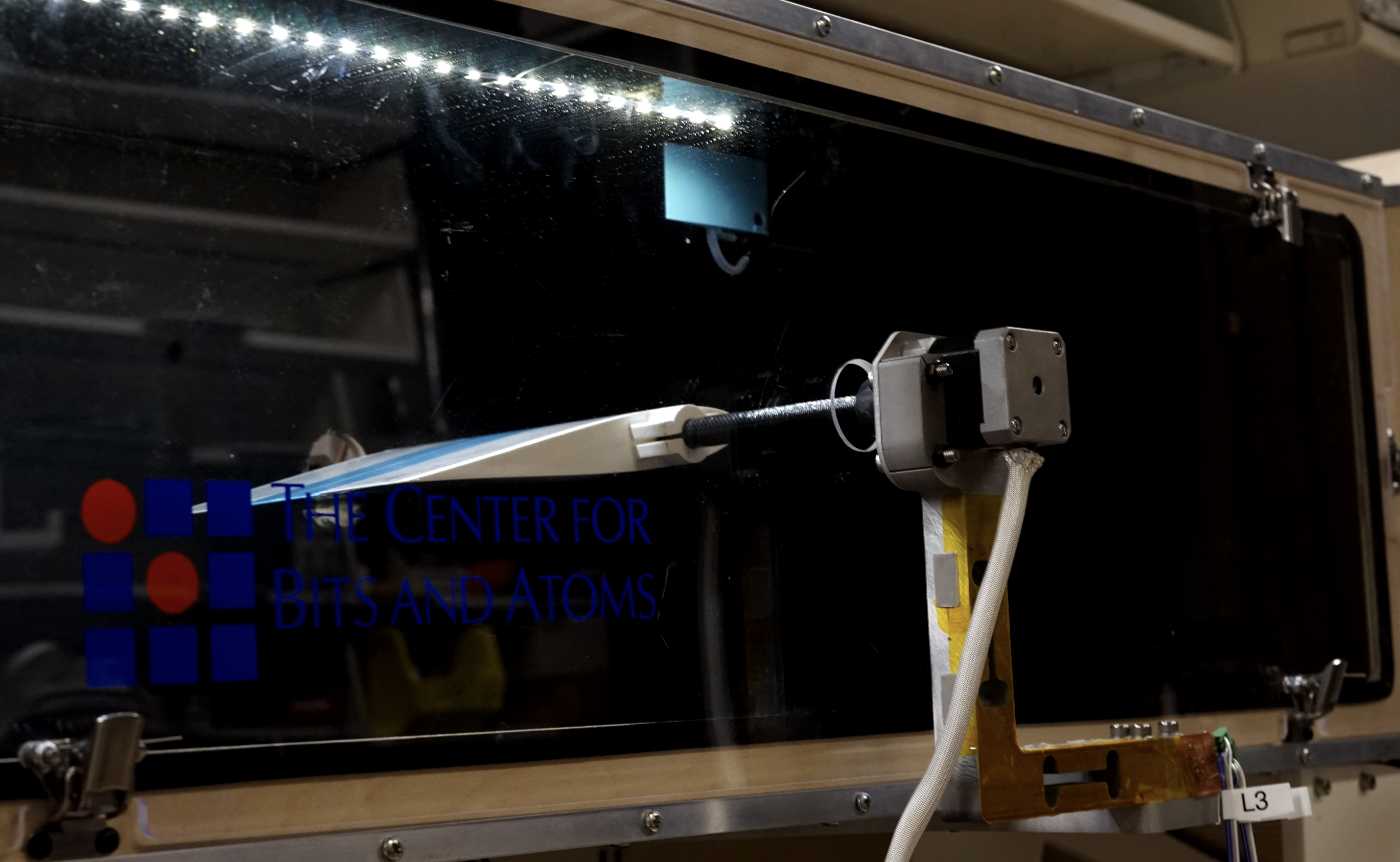
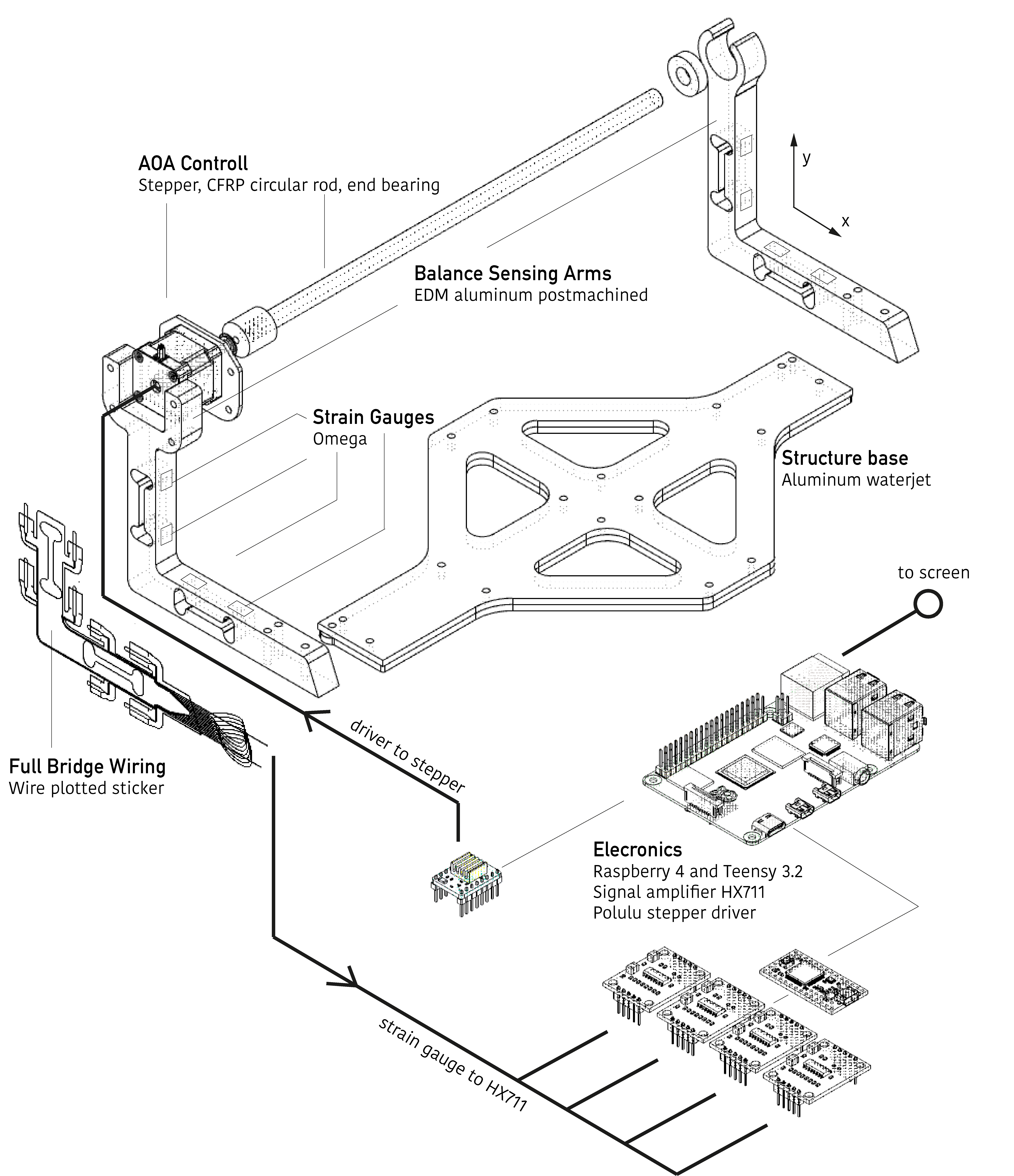
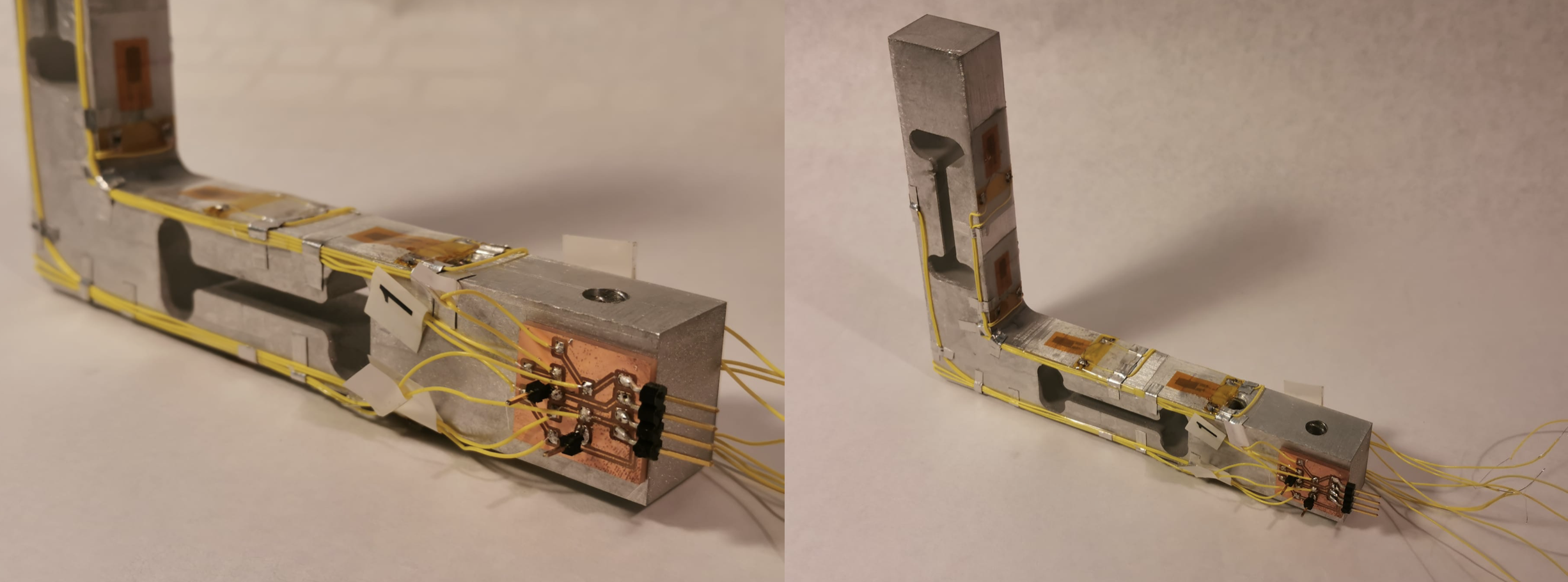
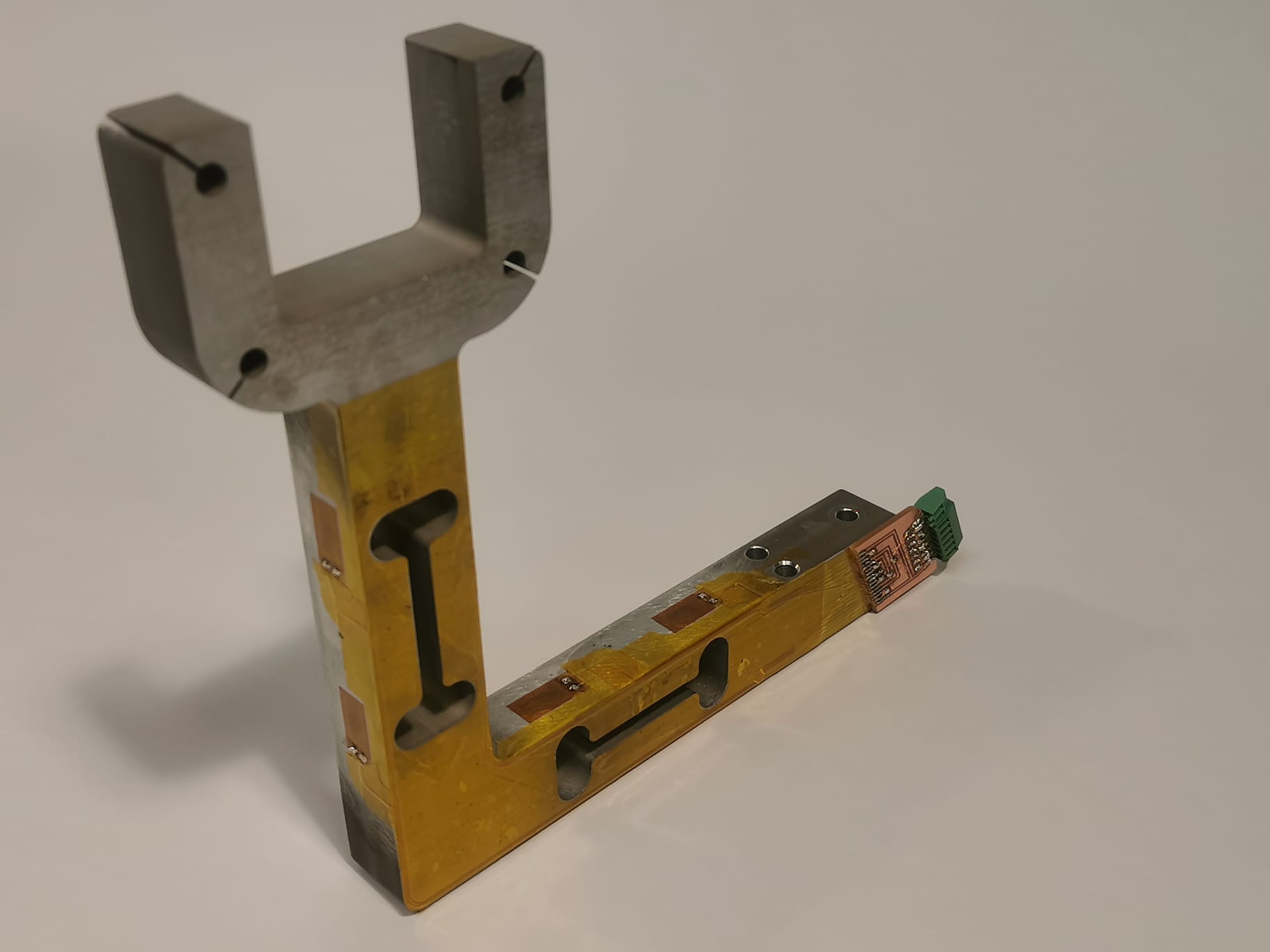
So I decided to make a 2DOF horizontal weight balance, using the arms to measure the loads of the structure itself, coupling the functions of being structurally compelling and a embedded sensor.
//// Systems Developed ////


1.2 Reading first values
 You can check the video here.
You can check the video here.
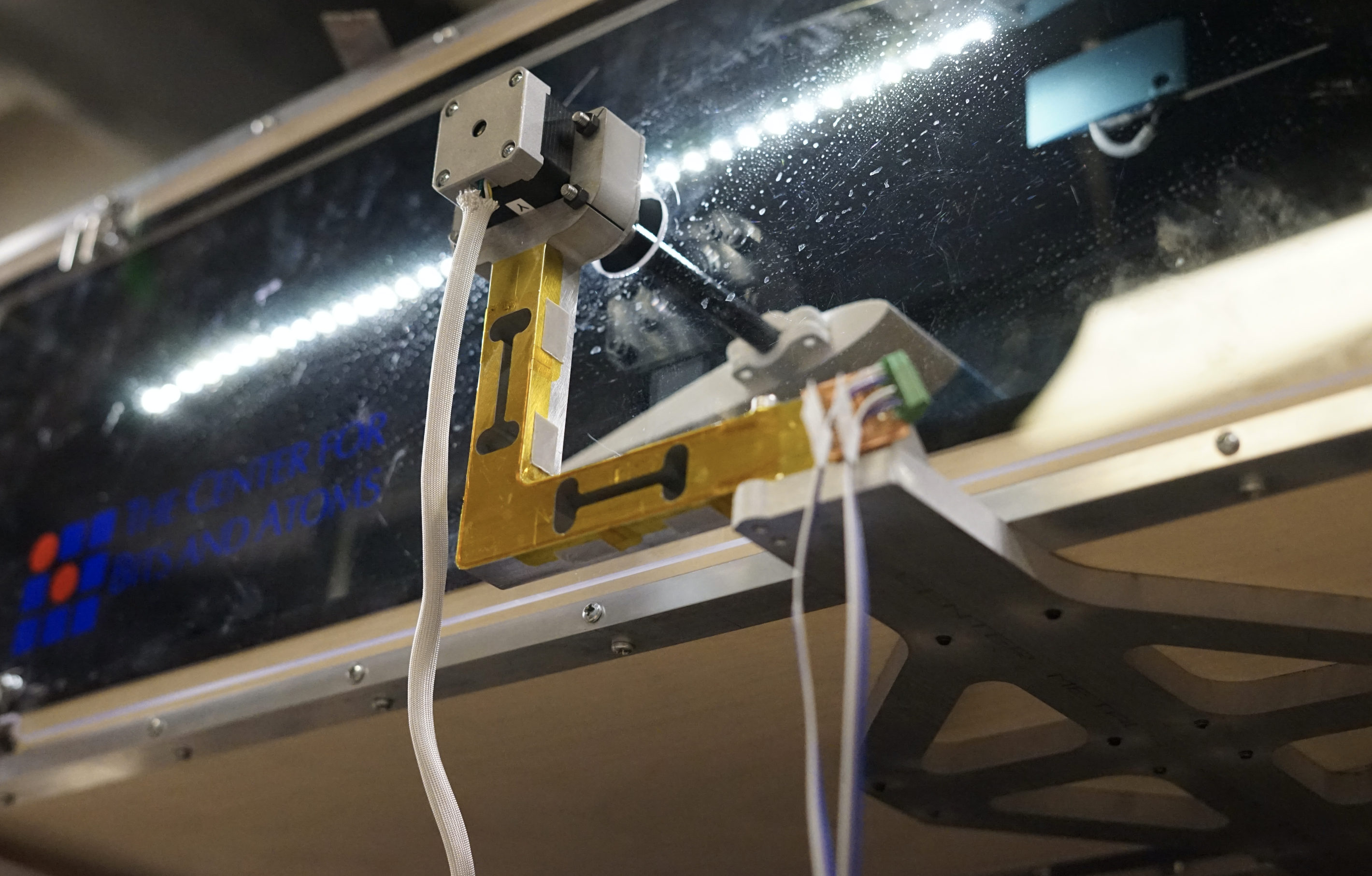
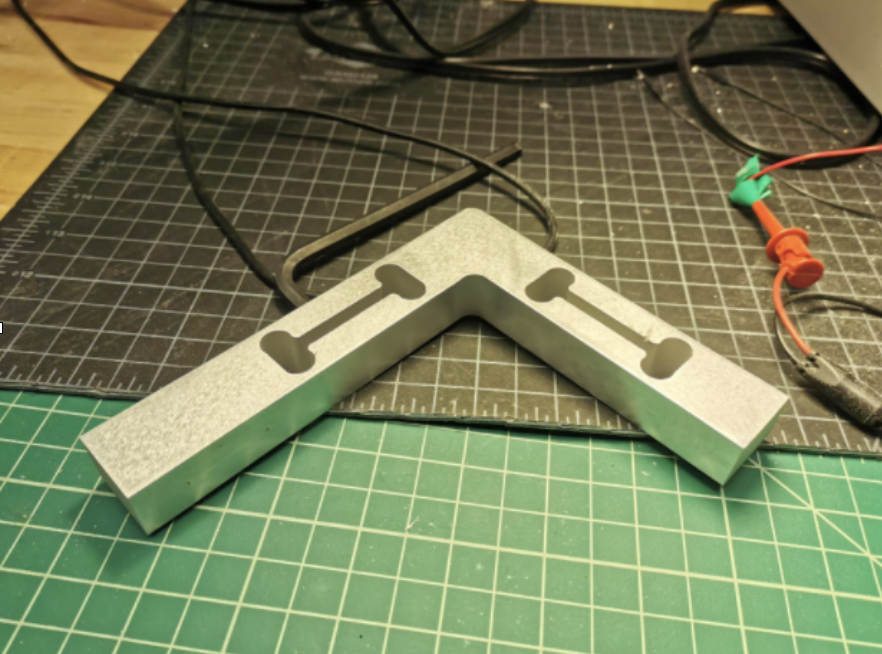
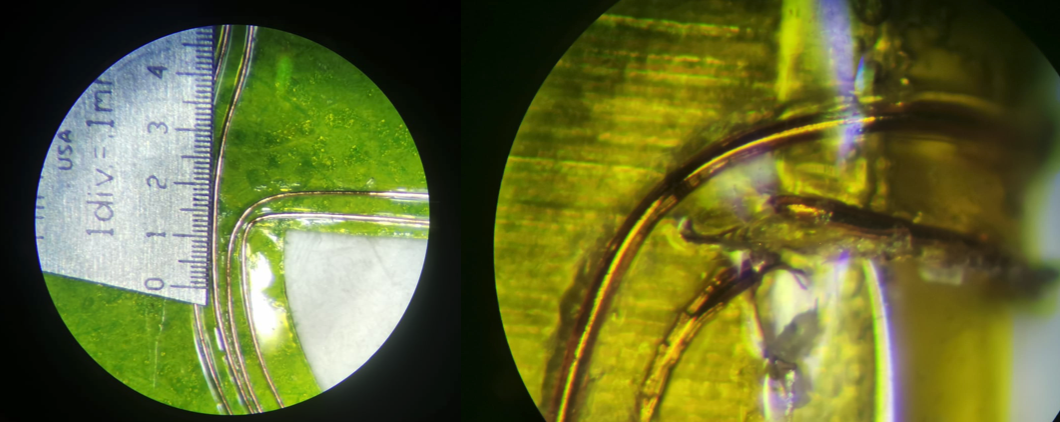
I firstly decided to jump from waterjet to EDM the load cell. I decided so to controll way better the tolerance of the thin section that the L structure have. Of course Zach helped me with the EDM process.
Later, I realized that maybe its not needed as you'll need to sand the lateral face to make the superglue work.
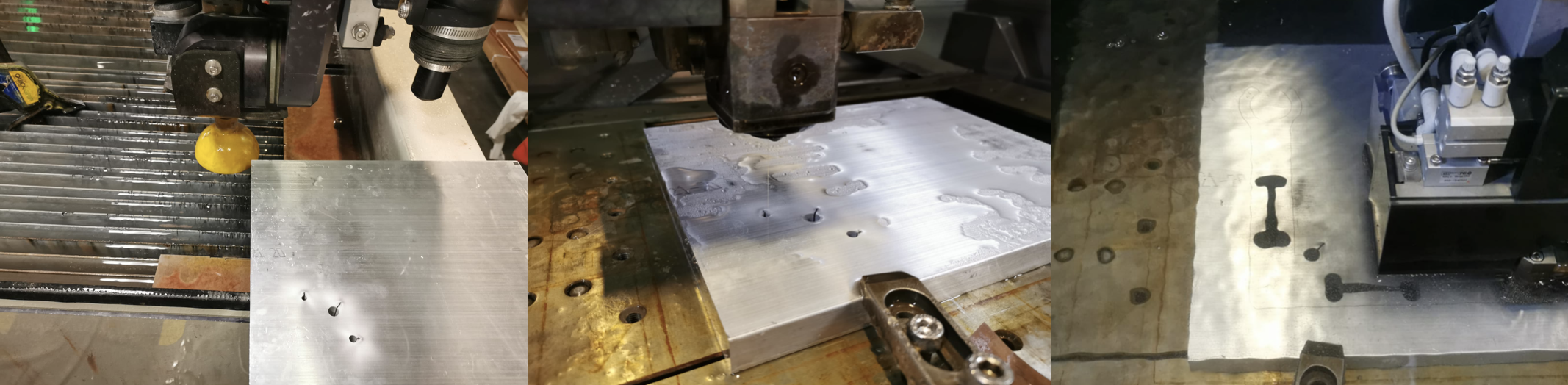
Ive also did cut the main base using the waterjet and tapped all the holes to be M5.
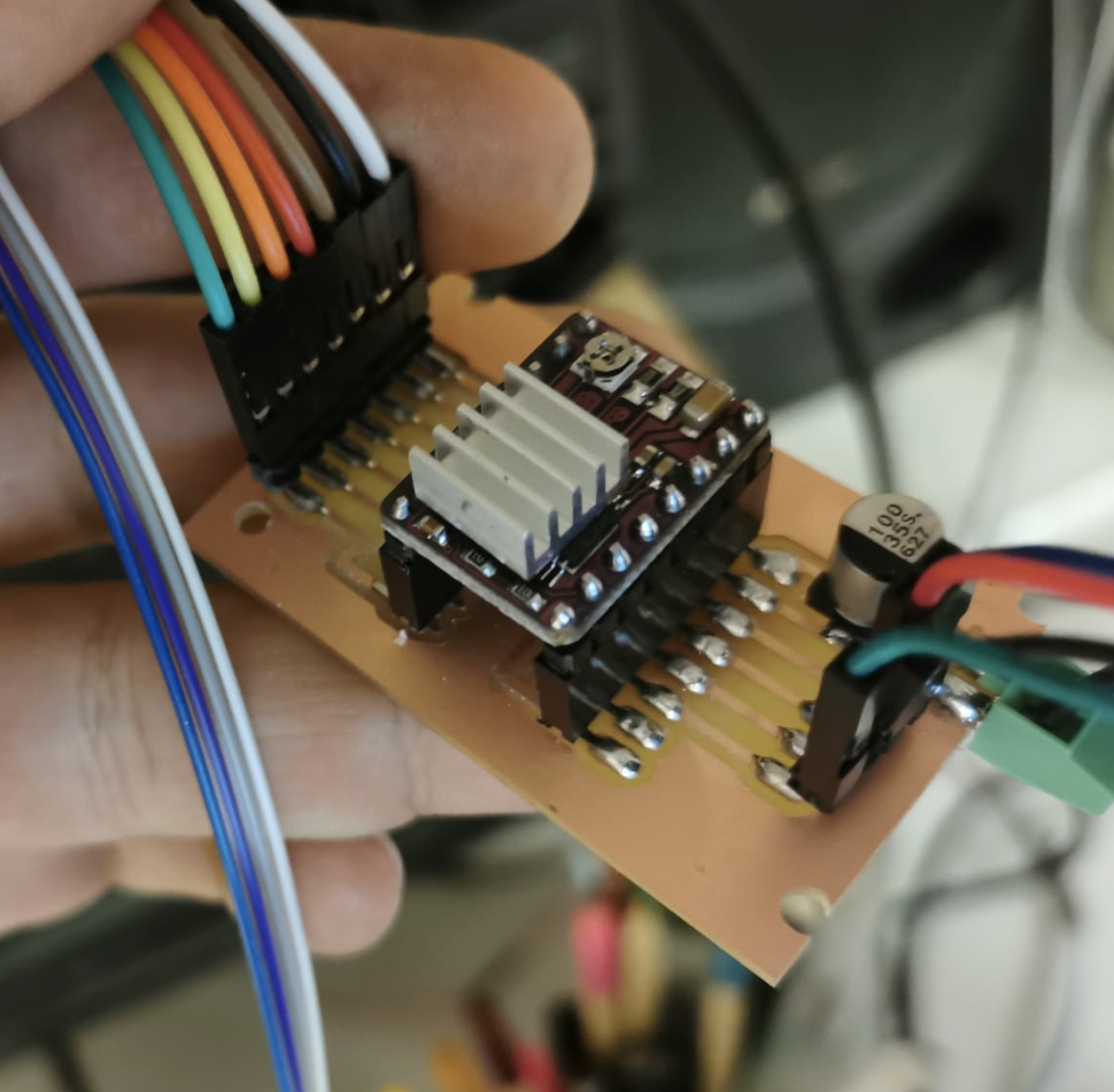
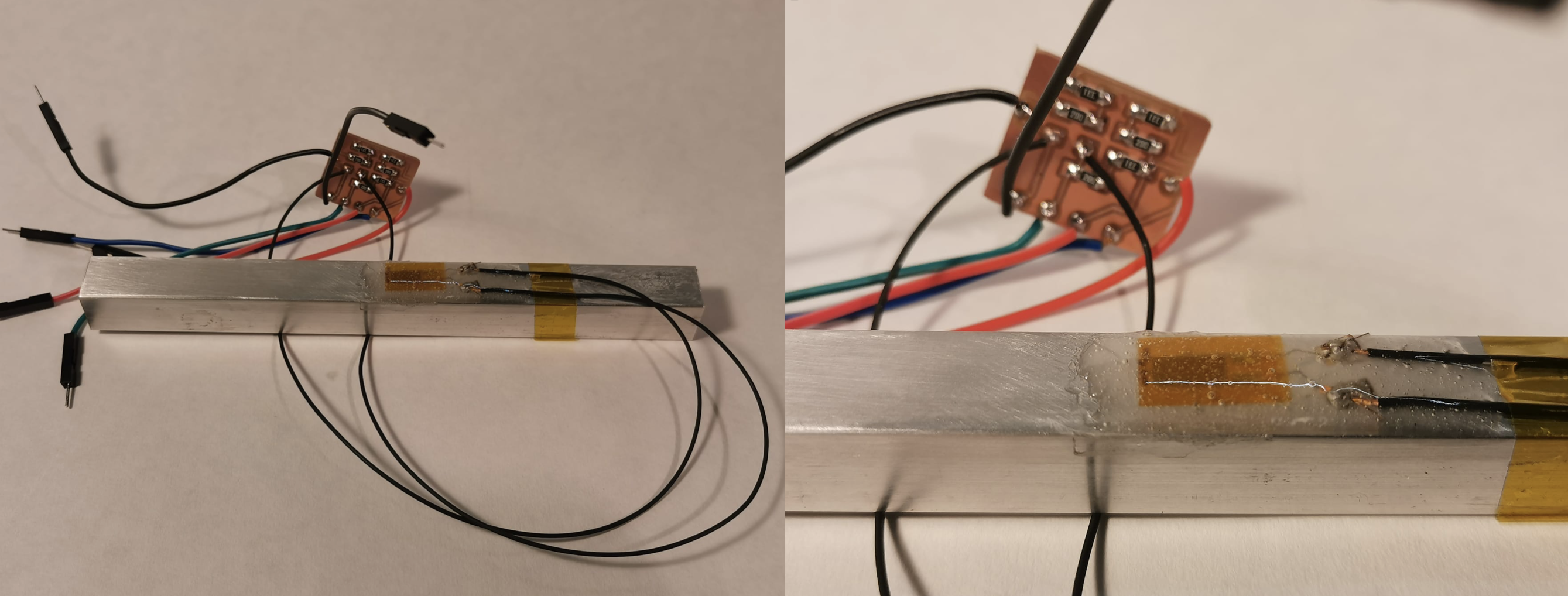
1.4 Wiring with wire plotter
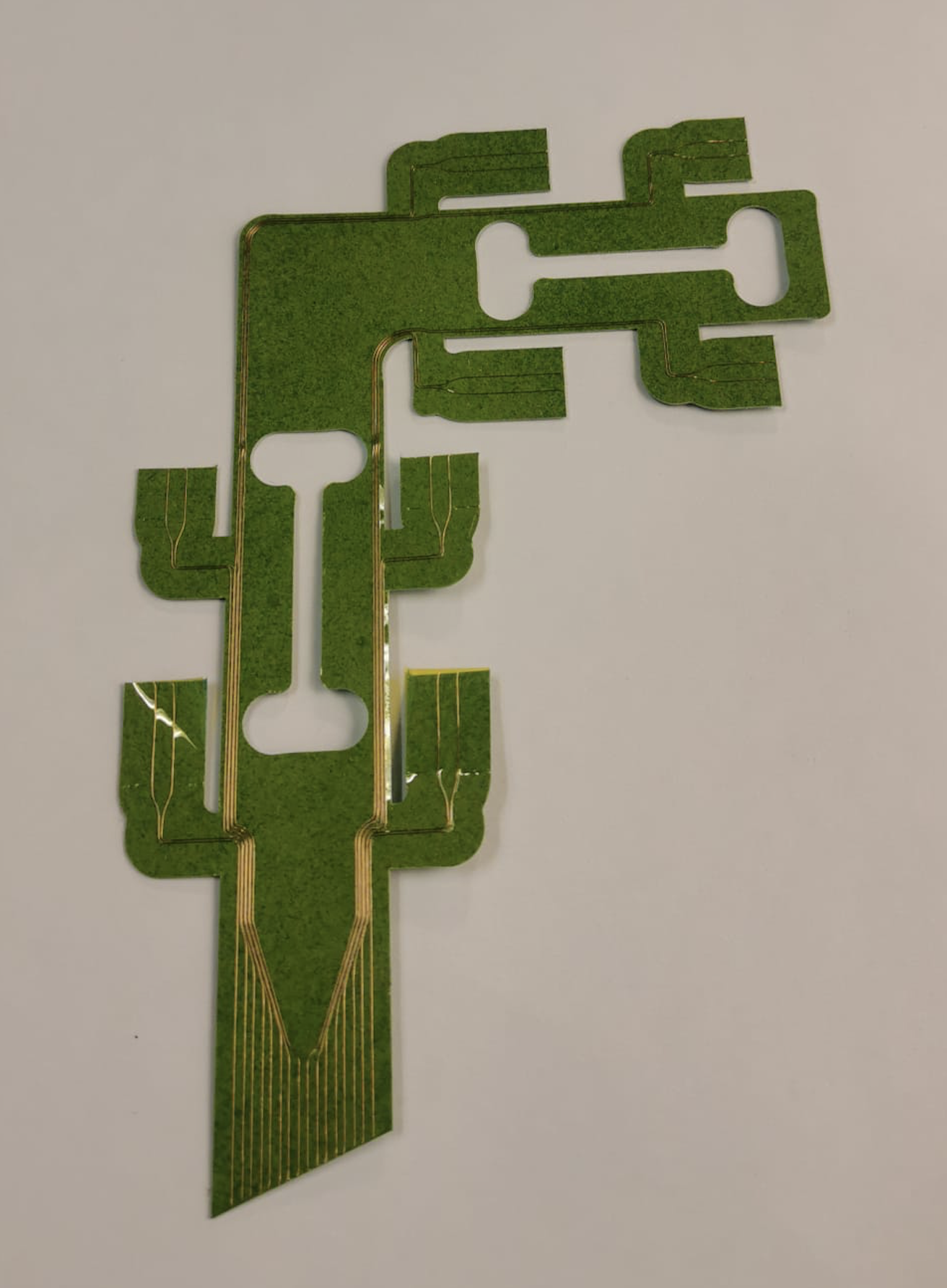
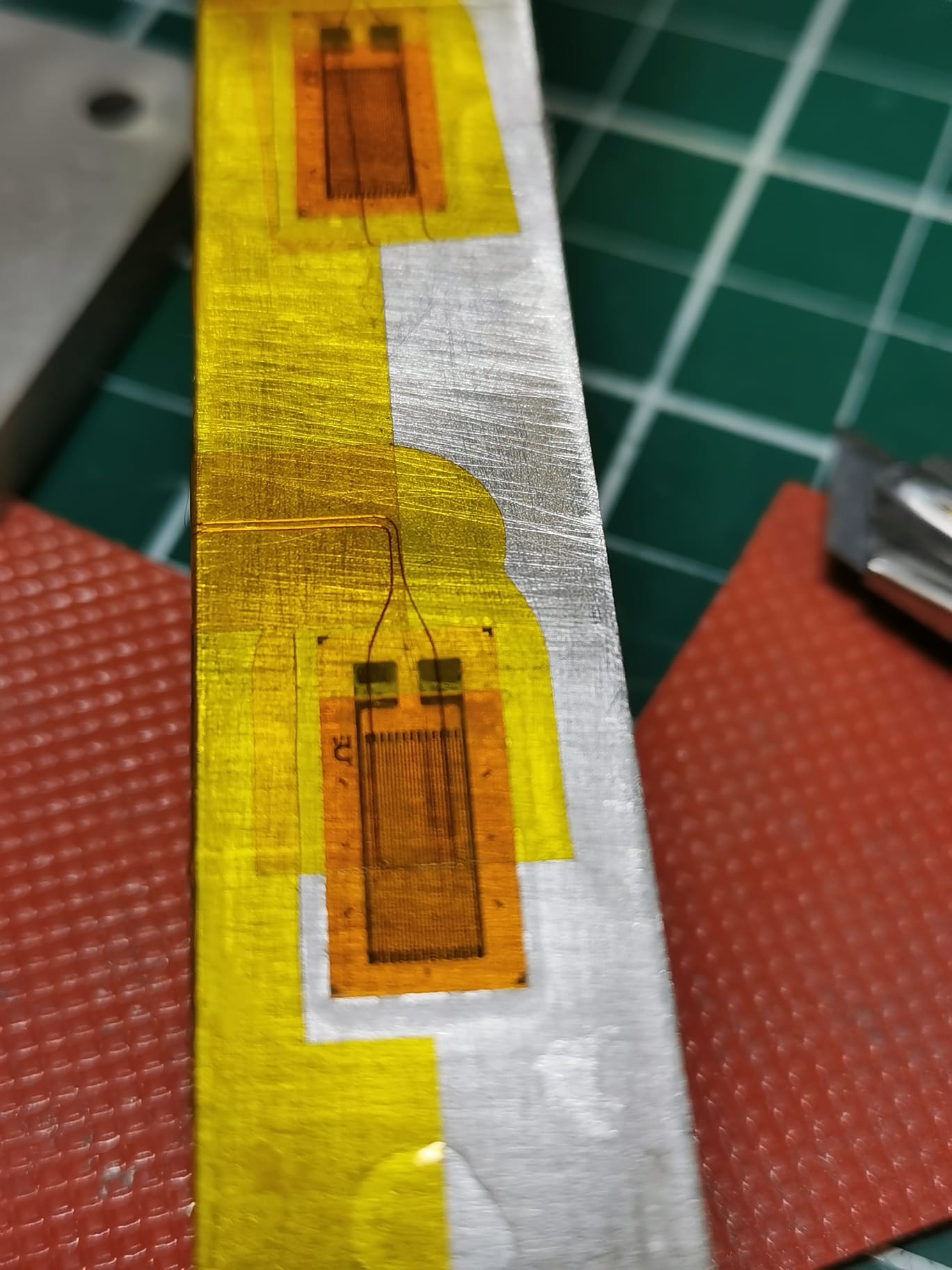
Sam Calisch , PhD student from our lab developed a beautifull hack for the zund as is wireplotting. You can check here the process (last chapter). That allows you to print a continuum (hamiltonian) path over a sticky material that, in my case, I used later to paste it on the loadcell and route all the neede cables.
As in the last loadcell it was a nightmare to route one by one those tiny cables I decided to automate it and even use thinner cable (41 AWG). First I did a dxf of a closed circuit that later will be cutted the perimeter in a way that breaks the continuity of the path, with the Zund in the same job
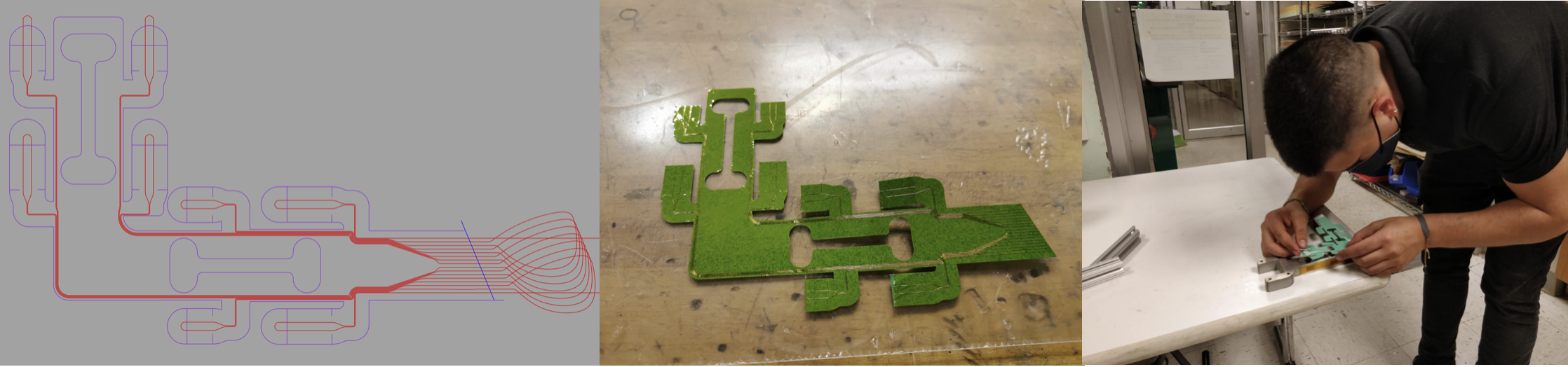
 And heck here the result
And heck here the result
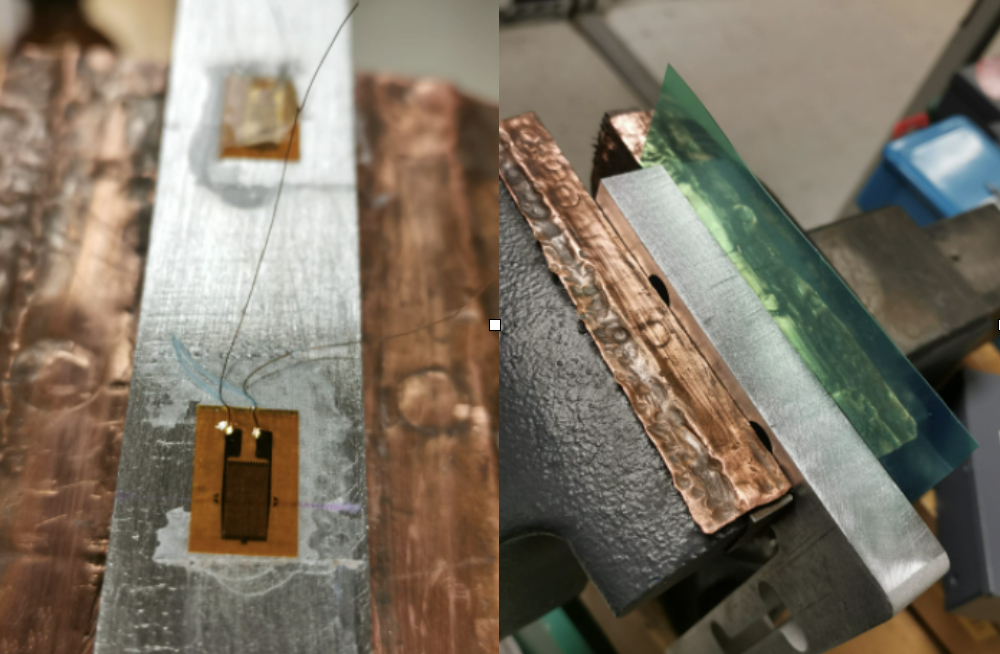
1.5. Strain gauge installation
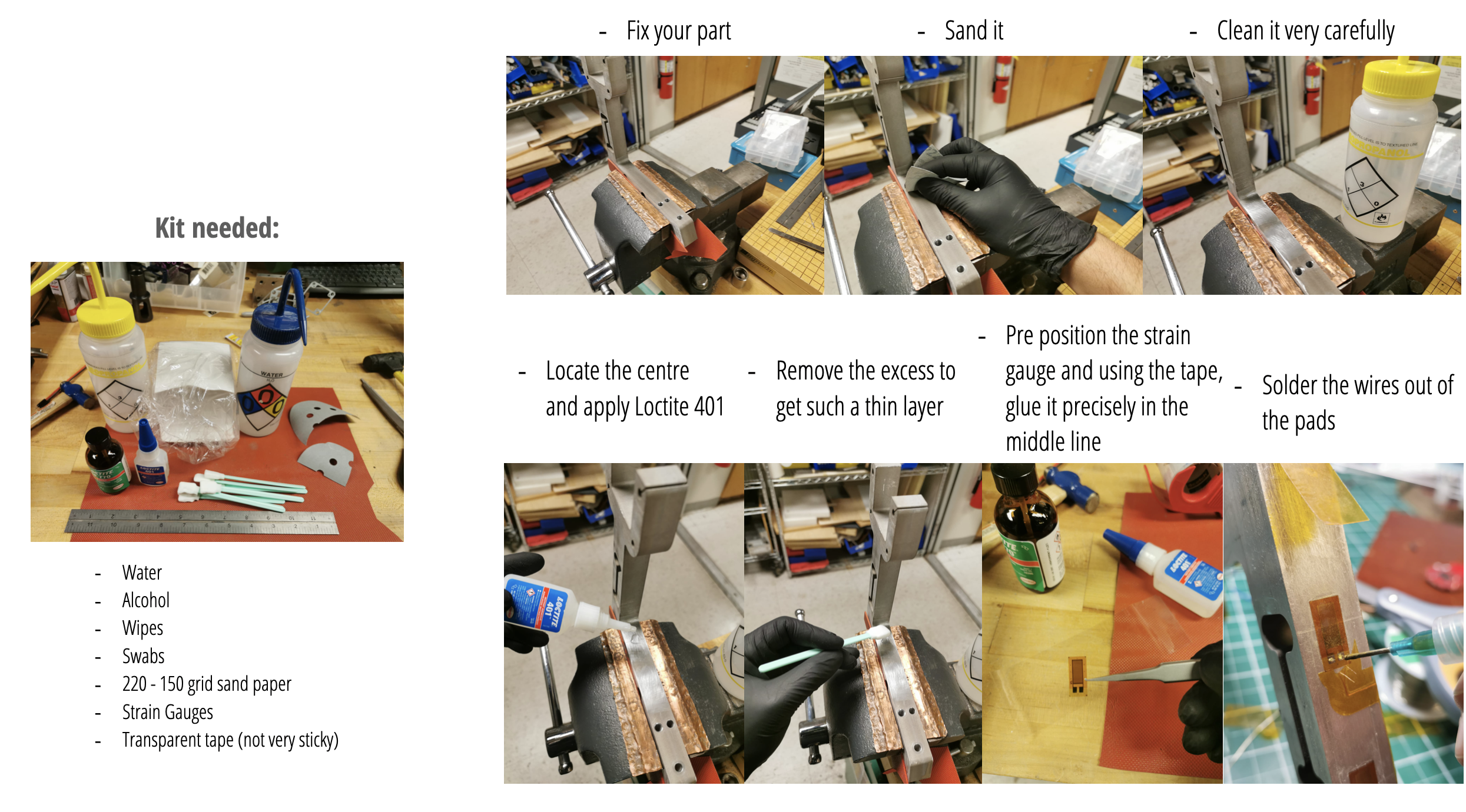
There's a reason why the protective kapton layer is more than needed.
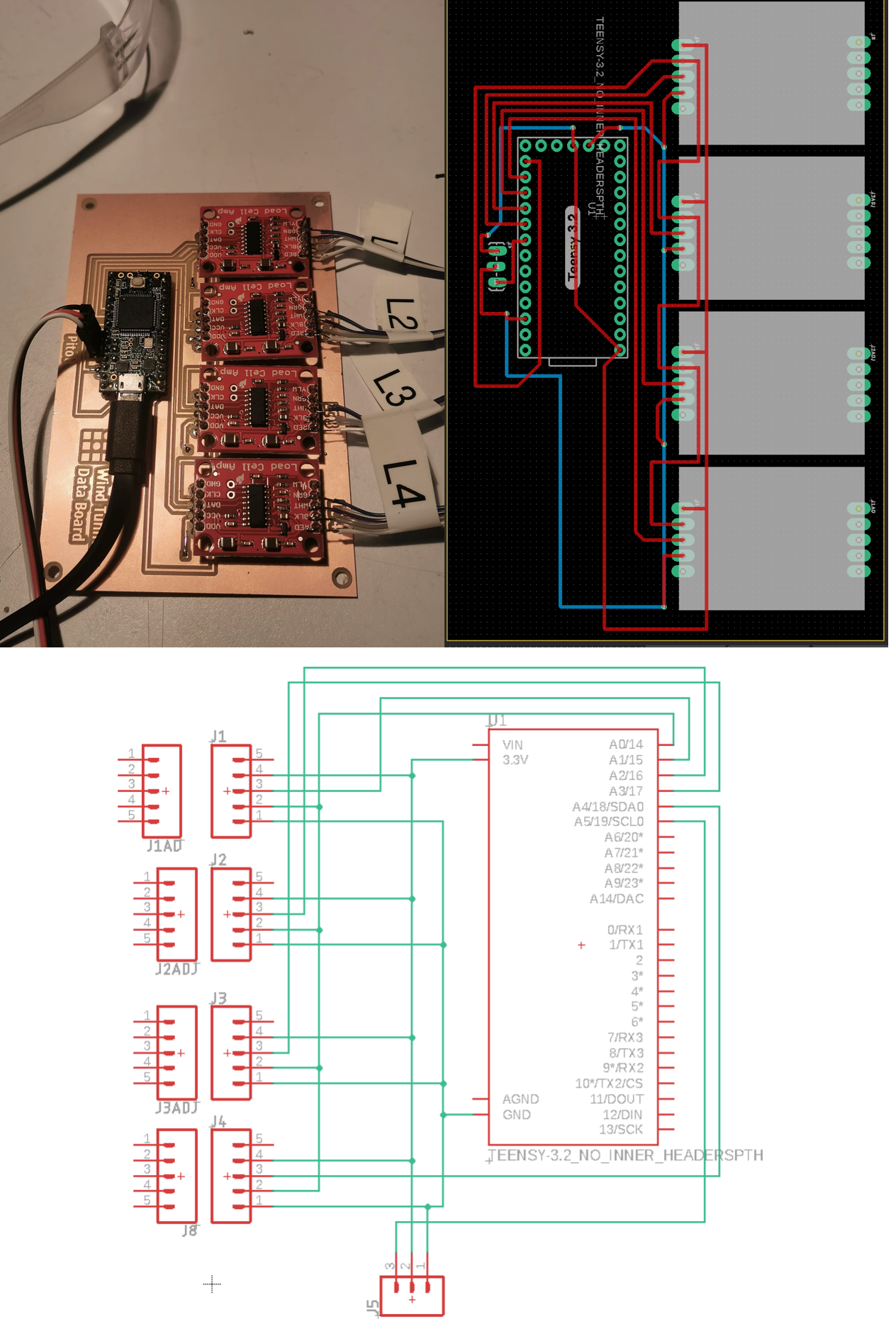
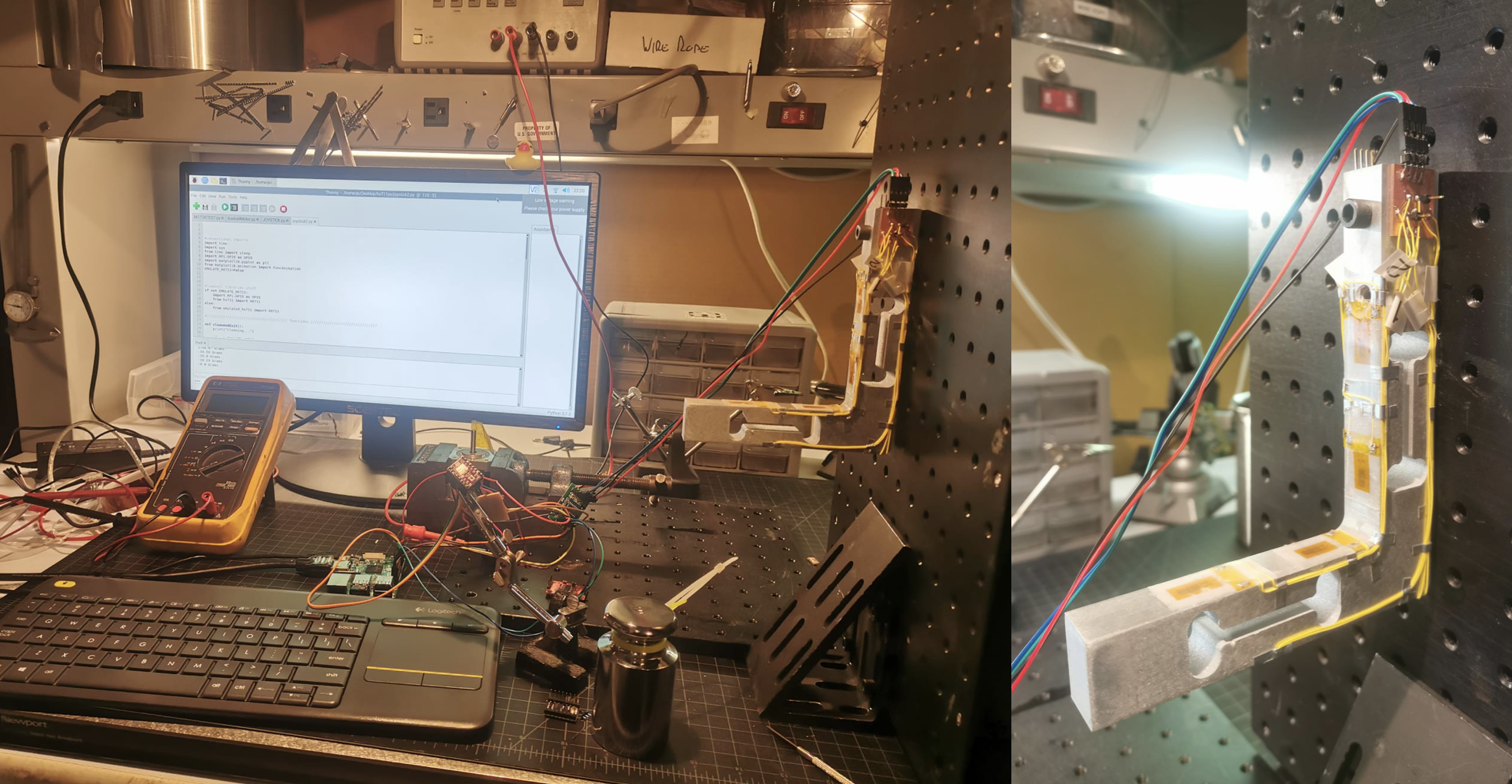
After reading for a while now the horizontal platform Ive been manufacturing and also, after adding the pitot tube, I noticed the need of implementing signal processing of the readed values.
The system architecture I decided to follow inside this project is:
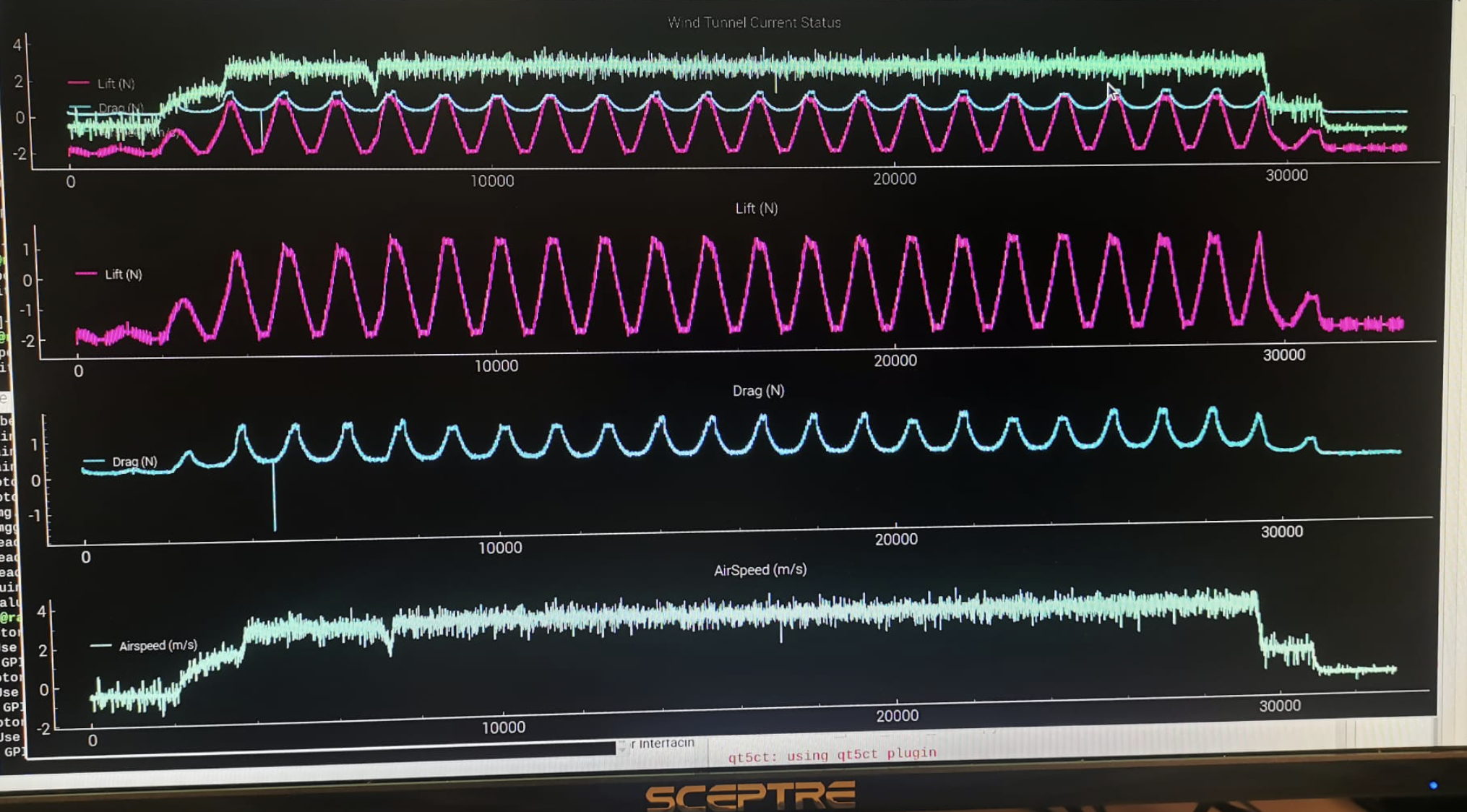
I started to research which filters could I use and Ive been implementing a Kalman filter, using a library, and it worked. After commenting it with Dave and Chris, they told me that my use was the perfect situation to implement a Low Pass Filter. This one yes, I implemented it by code. Here you can check how it smooth the signal of the pitot tube.
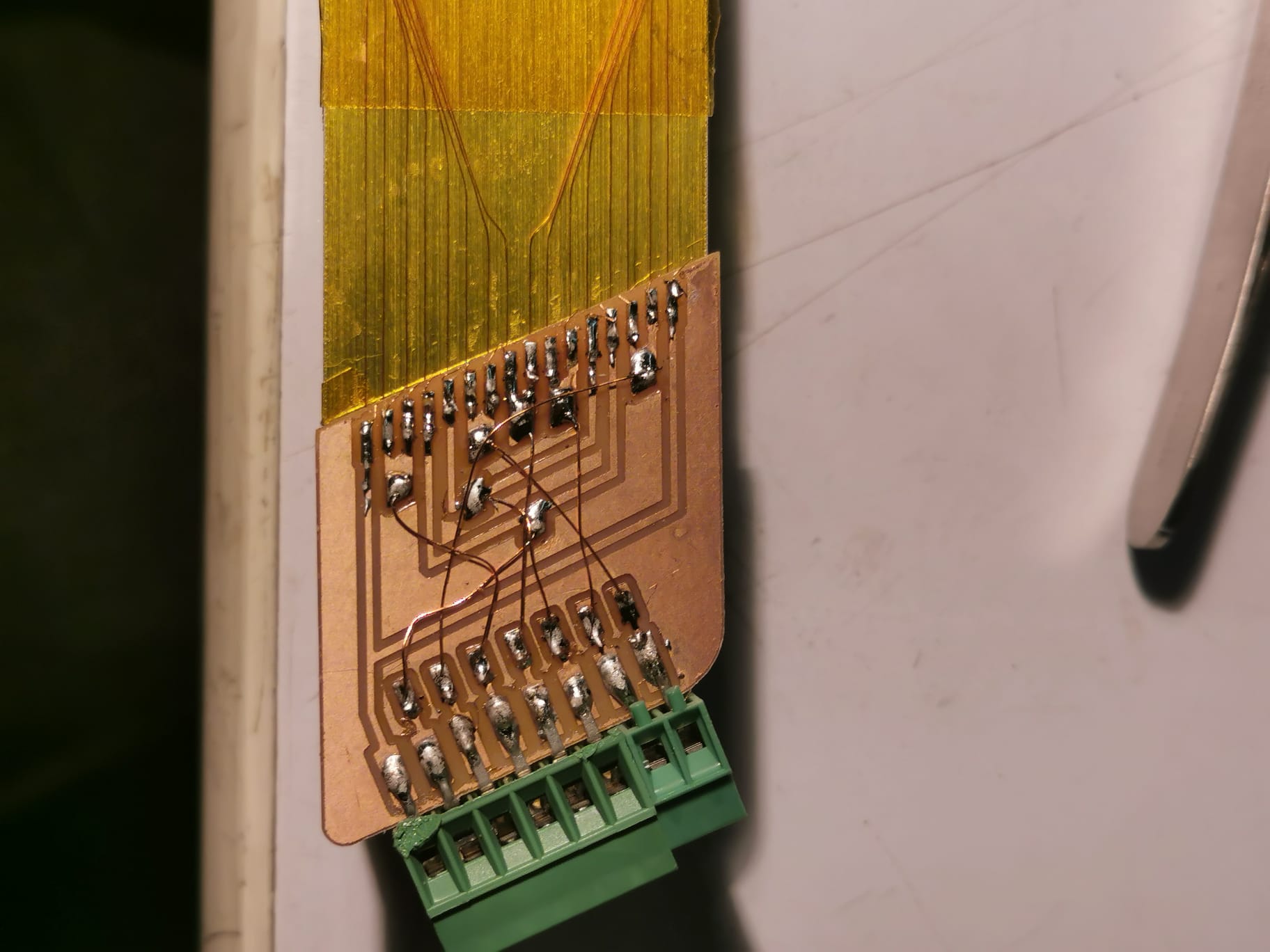
It was a meeeesss the way I had hooked up all the sensors using multiple breadboards, impossible to trace back any issue and I was procrastinating the decision of making a PCB to clean that.