back
project page for 2021 MAS.865 on inflatables
I am interested in robotic systems that take advantage of passive system dynamics to improve efficiency. For a class project a while ago, I worked on simulating the dynamics and controls of a spring loaded 1-d crawler (video explanation here). That project didn't go as far as I wanted, so I am revisiting some of it now.
In the interest of quickly getting a working prototype going, I decided to go with a rough inflatable thing. First, I made a quick small paper mockup (see below).
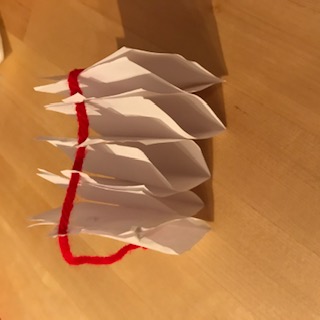

It is meant to have an accordian like structure that is springy. Tensioning the string along one side then curves the structure.


The plastic inflatable w/ 15" ruler for size reference. Contracted/uninflated on the left, extended/inflated on the right. Eventually, I will add yarn running down all four corners attached to dc motors + some kind of platform for the electronics.
This is not an airtight inflatable, and the plan is to run the fan at different duty cycles to tune the system's spring stiffness (I'm really just using the inflatable here to approximate what would ideally later be a passive system). I'd like to then use the system to try out some controls stuff I previously worked on.
This inflatable is made from weather sheeting (vinyl) and packaging tape. It is structured with packets so that lateral folding will always happen along consistent joints, and the structure will fold instead of collapse. The materials are such that it hypothetically could be made air tight, but I think it may be easier to deal with continuouse inflation inflatables. I've never made an air tight one that I didn't accidentally blow up while testing it. I'm also not convinced I have a good way of measuring the inflated-ness of the inflatable (I assume strain gauge on the surface would be the way to go?) so intake fan duty cycle seems like a more manually tunable option.
This inflatable has some problems which may significantly impede using it. Mostly, it runs very slowly (~30s to inflate) and is not very strong (I think its battery pack is too much weight for it). I think this was a fun first try to look at things with, and a better second version is on the way.