Parts
Availability of parts, generic specs, etc:
Hardware
Specifying the right hardware is often left to guesswork, but there’s real engineering to do if you want to get serious. Prof. Culpepper goes through that here.
I tend to buy 18-8 stainless hardware, but many hardcore mech-e’s prefer black oxide (which has higher hardness and stiffness, but can corrode eventually) or zinc-coated steel, which will corrode much slower but is more expensive than 18-8 or BO. I choose 18-8 because in most cases I am fastening 3D Printed (FDM / Plastic) components, or aluminum, both of which it is well suited for.
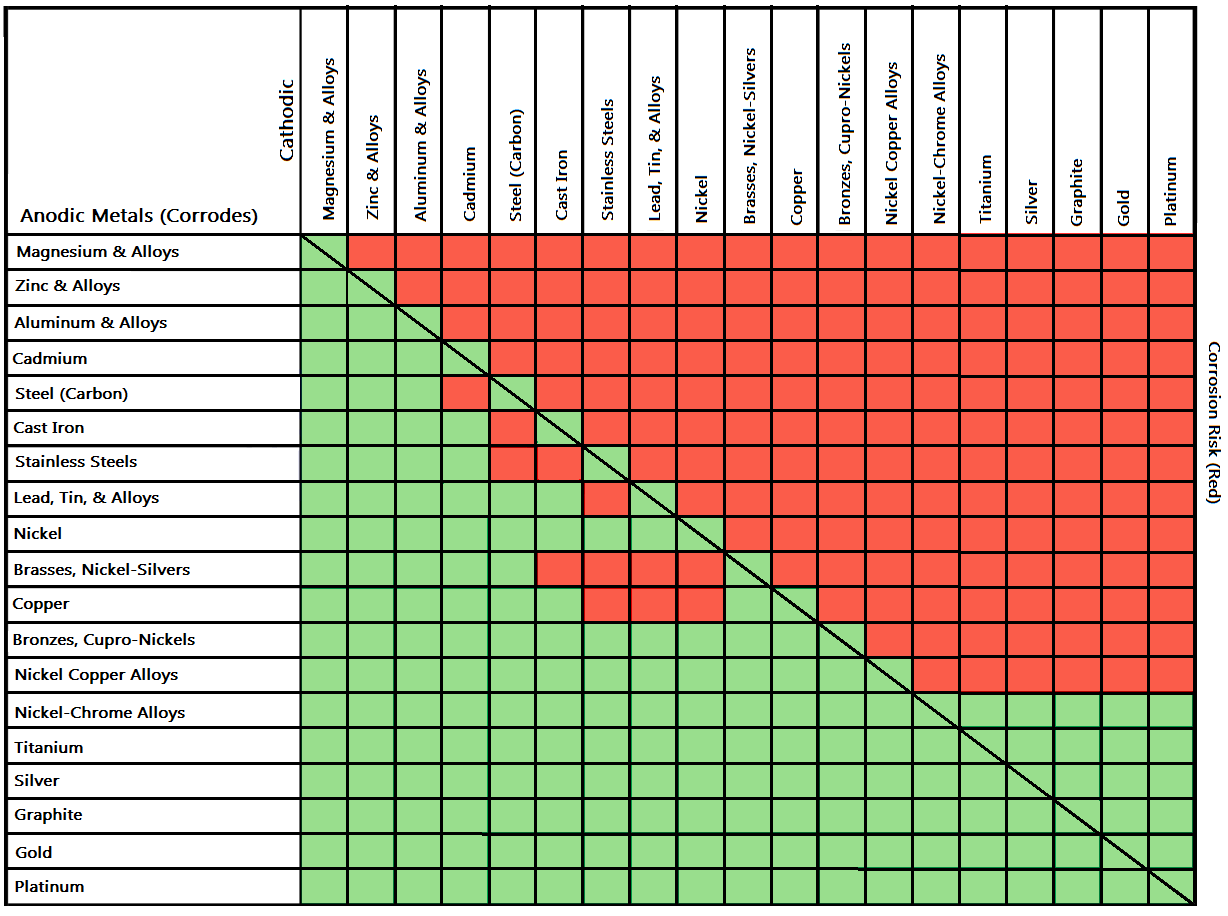
Galvanic Corrision is a phenomenon where bad fastener-to-fastened metal mixtures can accelerate corrosion, and need to be paid attention to when fastening i.e. cast iron with stainless hardware. For more, you can read the wiki on the topic or reference this chart:
Hardware Naming
We use shorthands for different types of hardware. While you might find these in the wild with i.e. phillips heads, those are a sin and you should only ever pick hex-head hardware, or torx (which provides better… torque).
SHCS refers to Socket Head Cap Screws, which are normally the first pick. Length is measured from the bottom of the head to the tip.
SHCS should be accompanied by a washer, as a rule, unless you are throwing caution to the wind. This is especially true when you are fastening into a slot.
FHCS refers to Flat Head Cap Screws, which are appropriate when a flush surface is desired, or hardware position is critical: the tapered insert asserts a particular position for the screw. I.E. do not use where adjustment is desired. Length is measured from the top of the head to the tip.
BHCS refers to Button Head Cap Screws, which are a nice lower-profile alternative to SHCS, but with reduced drive size, so are easier to strip heads out of. Length is measured from the bottom of the head to the tip.
Low-Profile SHCS LPSHCS exist, and some engineers keep kits of these instead of standard SHCS, but IMHO if your designs are so sensitive that you are having to use LPSHCS where a button head would do, you are either sending your payloads into space (in which case, congratulations) or you have put yourself into a pinch that some flexible design decisions could have avoided. For reproducible designs, this feels like the spiritual equivalent of a security-torx bit.
Bearings
Bearings make the world go ‘round and we have developed “trade names” for commonly available sizes. You can think of these as a kind of modularity across industry: I know what a 624 bearing is, and so does my counterpart in Texas, Germany or Japan, and we all have access to them thanks to standards-bearing organizations. That said, of course they are not all created equal and are separated by ABEC ratings (where the higher number == more better) and also by types of shield: -ZZ means the bearing has two steel shields, -2RS means it has two rubber seals (for more friction but better grease retention). Open bearings (no code) are reasonable to use under light loads, but should properly only be included in assemblies where lubrication is found in the environment (i.e. in a crank-case, which is internally filled with oil).
Bearing Loads
Keep in mind that bearings bear load in multiple DOF:
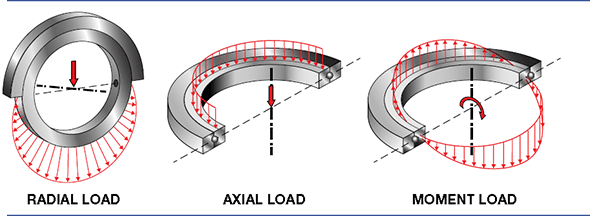
The ability of a bearing to bear load is related again to hertz stress between the rollers and the races.
Bearing Nomenclature
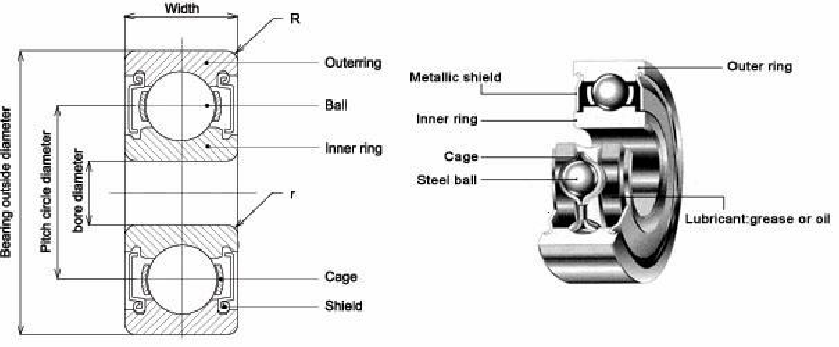
- inner / outer rings also called ‘races’
Roller Bearings

- most common
- high speed
- better for radial load (no wobble)
- should be preloaded for quality axial load
| trade # | id | od | t | dynamic (kN) | static (kN) | p (1, vxb) | note |
|---|---|---|---|---|---|---|---|
| 625 | 5 | 16 | 5 | 1.7 | 0.67 | 2.4 | Clank Bearings |
| 605 | 5 | 14 | 5 | 1.3 | 0.51 | 5.1 | |
| 624 | 4 | 13 | 5 | 1.3 | 0.5 | 3.95 (pick) | |
| 604 | 4 | 12 | 4 | 1 | 0.35 | 4.7 | |
| 619/4 | 4 | 11 | 4 | 1 | 0.35 | n/avail | |
| 623 | 3 | 10 | 4 | 0.63 | 0.22 | 6.7 | |
| 6806 | 30 | 42 | 7 | 4.5 | 2.9 | 13 | BB30 Bottom Bracket Bearing |
| 6808 | 40 | 52 | 7 | 4.9 | 3.5 | 19.5 | |
| 6810 | 50 | 65 | 7 | 6.7 | 6.8 | 24.5 | |
| 6812 | 60 | 78 | 10 | 11.9 | 11.4 | 31 |
Angular Contact Bearings
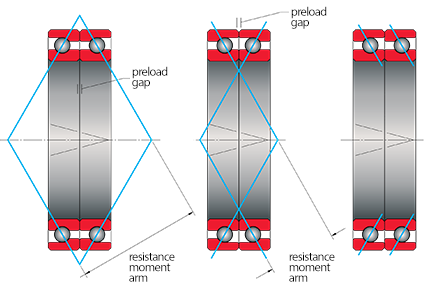
- specialized
- (tandem) moment loads
- (single) axial loads
- pay attention to preload
1-1/2” Bicycle Headset AC
1-1/8” Bicycle Headset AC
Needle Rollers

- higher loads
- thrust (axial) or radial configurations
- occasionally direct-on-shaft
Specialized
There are a wide array of avaialable specialized bearings, for specialized applications. This list is not exhaustive.
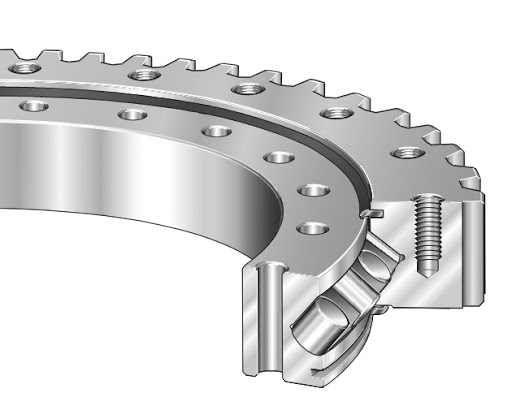
Crossed Roller Bearings
- high moment loads (found in robot arms)
- expensive
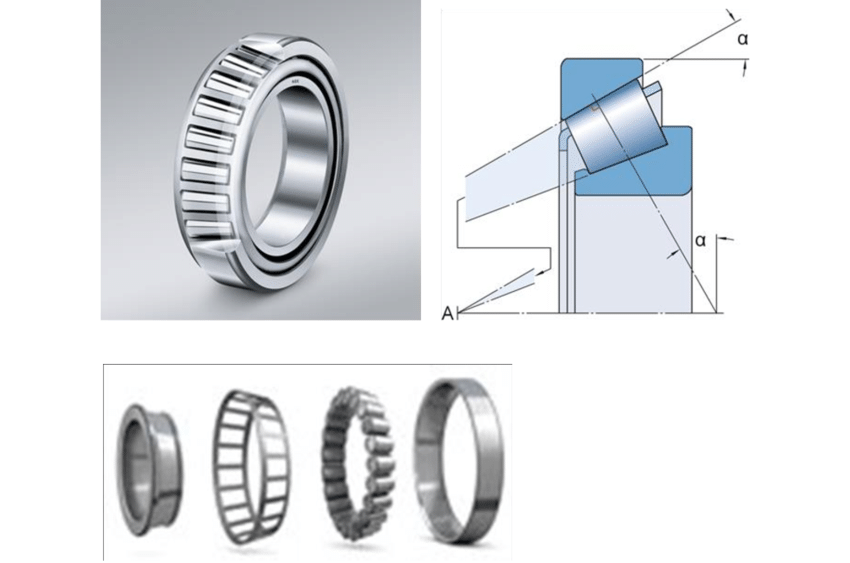
Tapered Roller Bearings
- basically high-load angular contacts
- common in (older) wheel bearings on automobiles
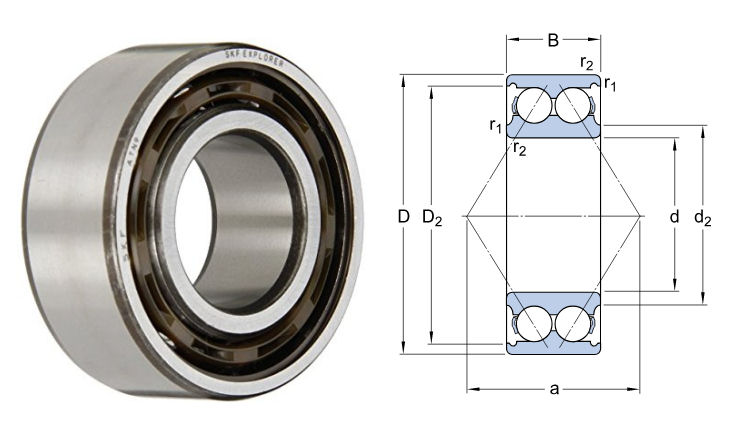
Double Row Angular Contact
- pairs of angular contact in one assembly
Plain Bearings
- aka ‘bushings’
- the og
- often bronze, or some soft(er) material
- somtimes “oil impregnated”

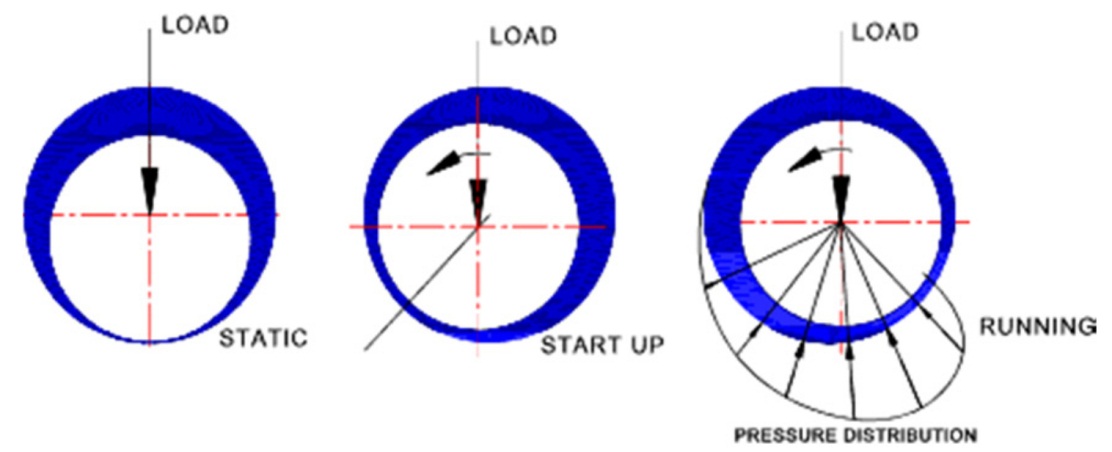
Journal Bearings
- oil (or air) film (aka hydrodynamic bearings)
- actively lubricated
- should be high precision
- extremely high loads (water turbines)
- extremely high speeds (magic-angle resonance spinning (for science), turbochargers (for joy))
Linear Case
All of the above bearing styles are easiliy rearranged in linear cases, I’ll just leave one example here, the rest can be left to the imagination:
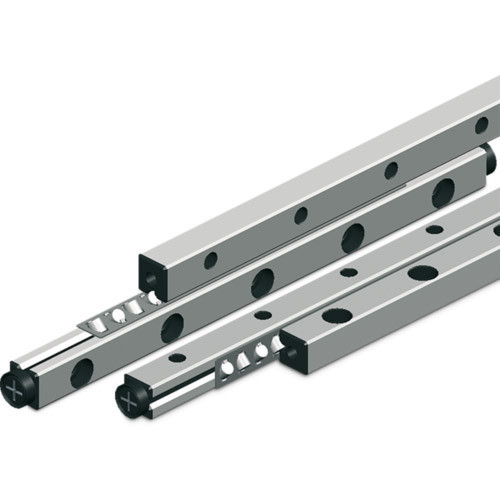
For example, the linear guides discussed in the previous section are bearings - OK, I won’t repeat myself.
Bearing Considerations
- don’t pinch both races!
- keep loads close to the bearing (offset principle & abbe error)
- preload is your friend
Extrusion
Aluminum extrusions are extremely cheap, relatively stiff, mostly straight enough, and make it very easy to whip up machine chassis / rails with little effort. As such, they’ve become a fairly common solution in the machine building space.

AKA t-slot framing:
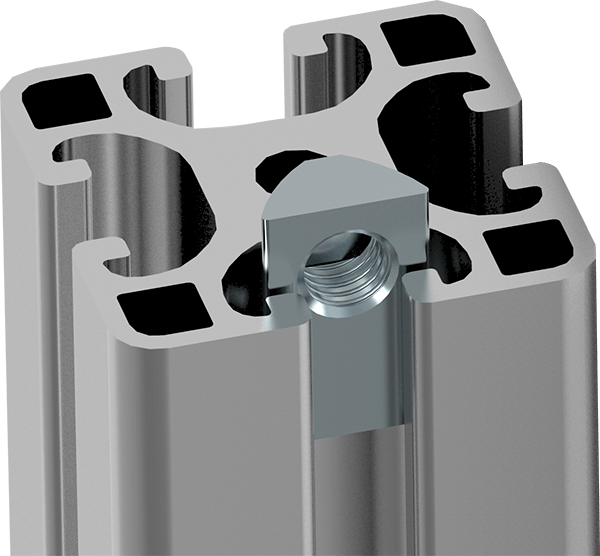
I normally find this on misumi and prefer the 5-Series for smaller machines (… clank). This is interchangeable with most other “20mm” spec extrusion found from a plethora of vendors.
It’s worth noting that making custom extrusion profiles is actually fairly cheap: a tool (die) can cost ~ 10k depending on complexity (and internal channels) after which the cost of extrusion ~= the cost of aluminum.
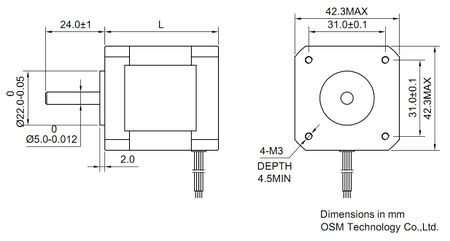
Motors
You’re sure to find at least one NEMA 17 stepper motor in this class. NEMA is the National Electrical Manufacturers Association and their motor (flange) specifications are standard around the world.
N17
N23
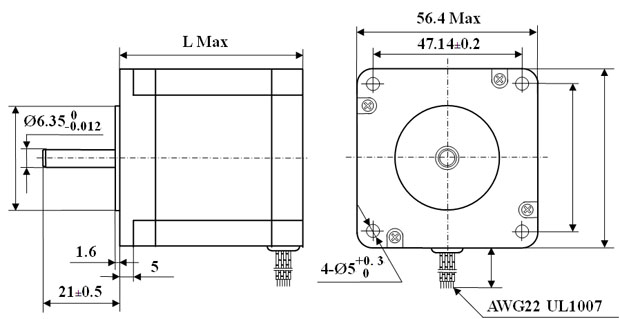
Smaller NEMA exist, N14, N11, N8, up to N34. The standard encompases not just Stepper motors but also BLDC drives.
Outrunners
Also common are “outrunner” brushless motors, brough to dominance due to their common use in UAVs / Quadcopters. These can be excellent drives, but require more advanced control, and (what is often overlooked) do not have internal bearings meant to withstand i.e loading against a rack and pinion, or a tensioned belt

Here, diameter is typically linked to a torque constant (pulling farther from the center == more torques). Particularities w/r/t the windings also change these ratings, known as ‘kV’ ratings (relating Volts to RPM, or in the inverse, to Torque).
Transmission Elements
We’ve covered these in general, here are some particulars:
| part | link / pn | notes |
|---|---|---|
| GT2 Belt 6mm Width Open Ended | amazon | |
| GT2 Belt 6mm Width 280mm Closed | amazon | |
| HTD 3M Belt 15mm Width Open Ended | amazon | |
| 1204 Ballscrew | amazon | |
| 1605 Ballscrew | amazon | |
| T8 Leadscrew | amazon | |
| Pushrods (linkage) | amazon | |
| Rod Ends | long and short |
- I prefer 9mm wide GT2 for the ~150% stiffness bump
- ballscrew i.e. ‘1605’ means 16mm nominal diameter, 5mm pitch
Other vendors for more advanced parts include: