Final Project
So Ive decided to leave this final project page as a bit more of a timeline through the proccess of creating the final project from beggining to end, from inspiration to ideation to protoryping and execution and the whole journey! I hope you enjoy it, it was a fun and extremely challenging process! The first inspitations for the final project started as wanting to create a kinetic art piece that tells a story. Inspired on the work of artists like Nick Doyle and Arthur Ganson.
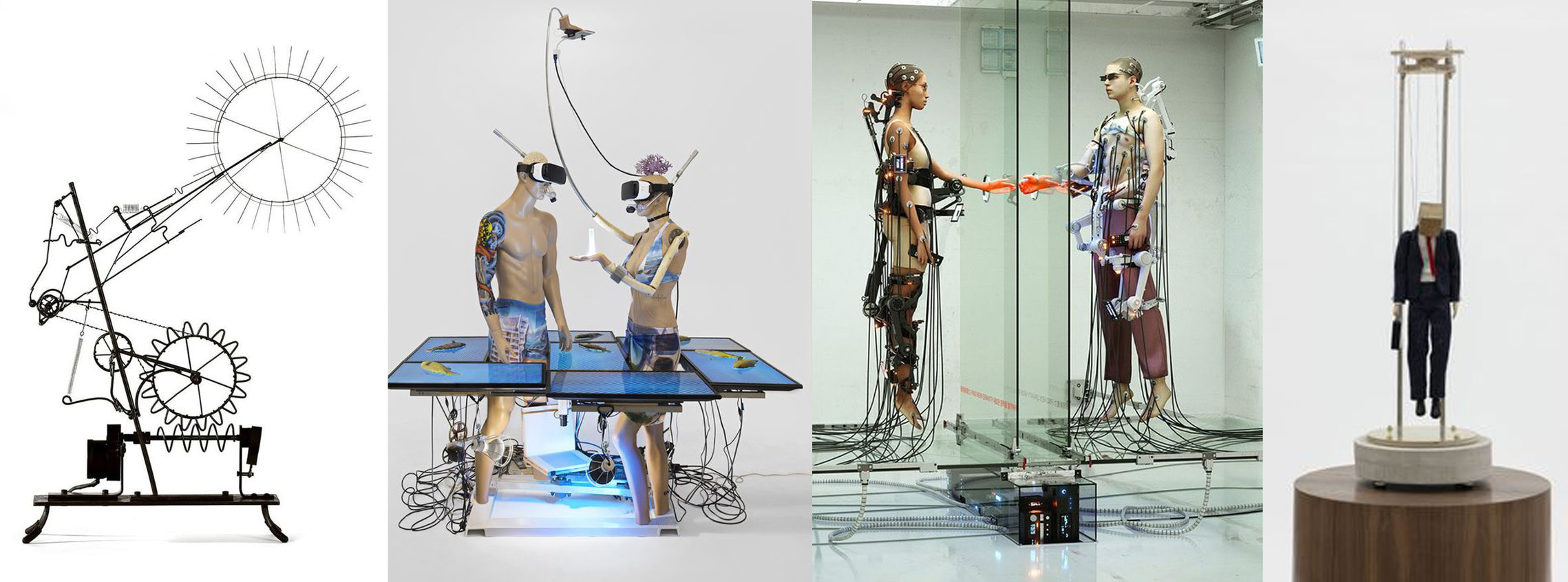
The idea of an expressive piece through mechanics, craft and electronics is something I have been interested for a while and feel like this could be an amazing opportunity to finally explore it

Preliminary skectch of the piece.. Thinking of two distopic scene occuring next to eachother, a murder and a gamer two worlds apart separated by a tiny door and at the bottomn exposing all the systems required to create the piece, motors, mechanics etc.
After I started thinking about mapping each week onto the sculpture and then starting to figure out what shape the project will start taking.
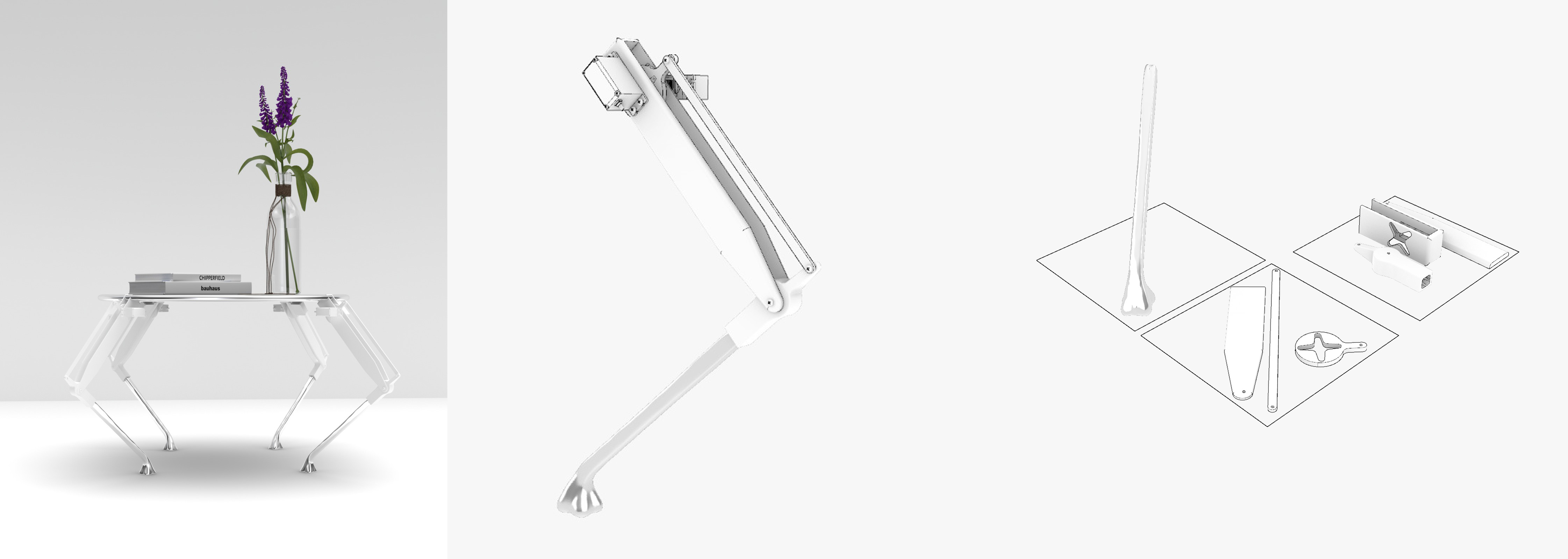
I really had no idea what was going to be the piece but I thought well it might need a base anyway so lets do that in this coming weeks. I designed this anthropomorphic looking base and I decided to 3d print it as a prototype and once I did I decided to shift the idea and make the night stand itself the final project. It will be a running little table that runs away from you as soon as you get close
Shy nightstand? moving table? I dont know the name yet but I want to add some sensors so whenever you get close to the nightstand it runs away from you. Never snoozing the alarm again I guess!
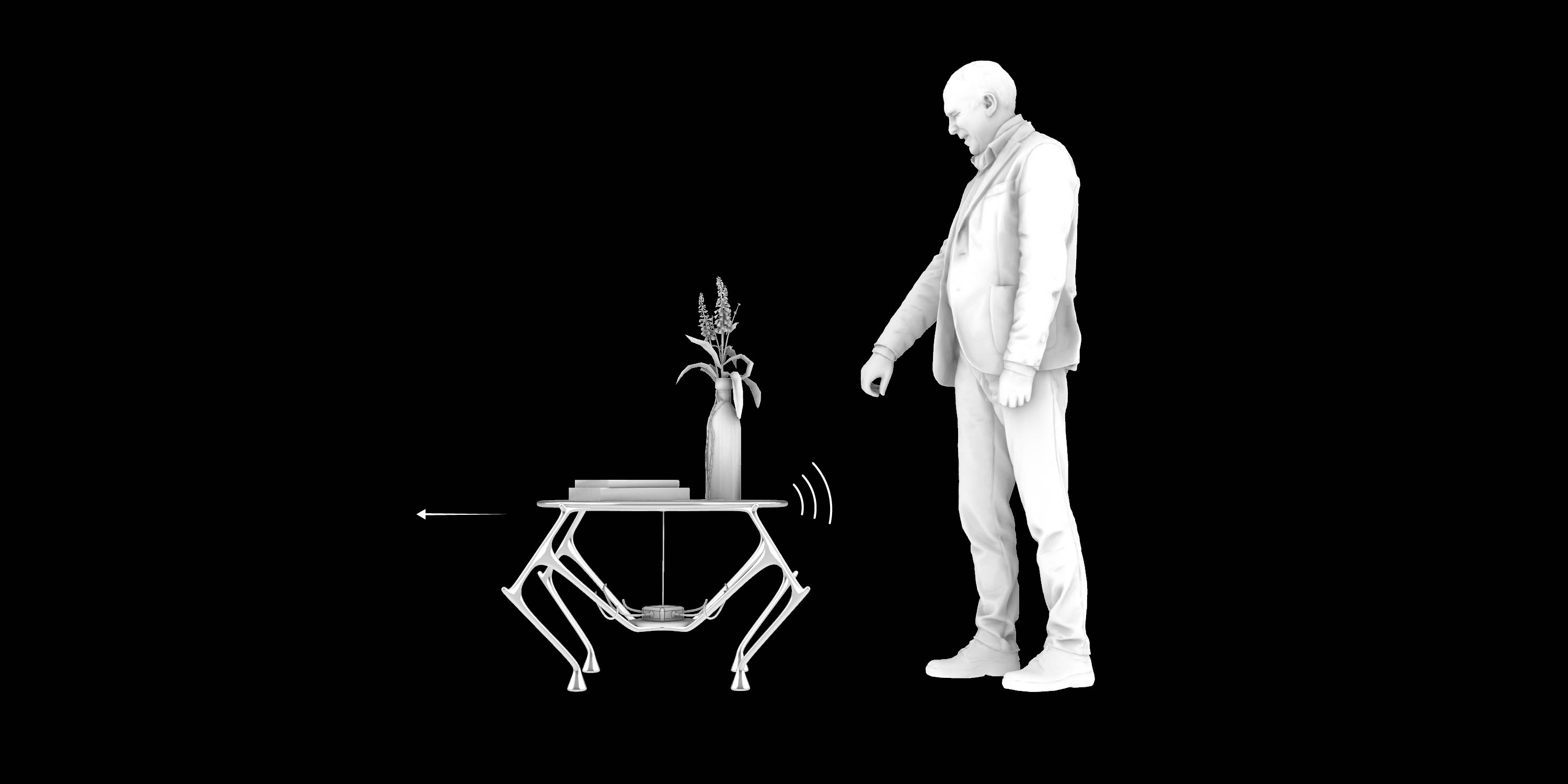
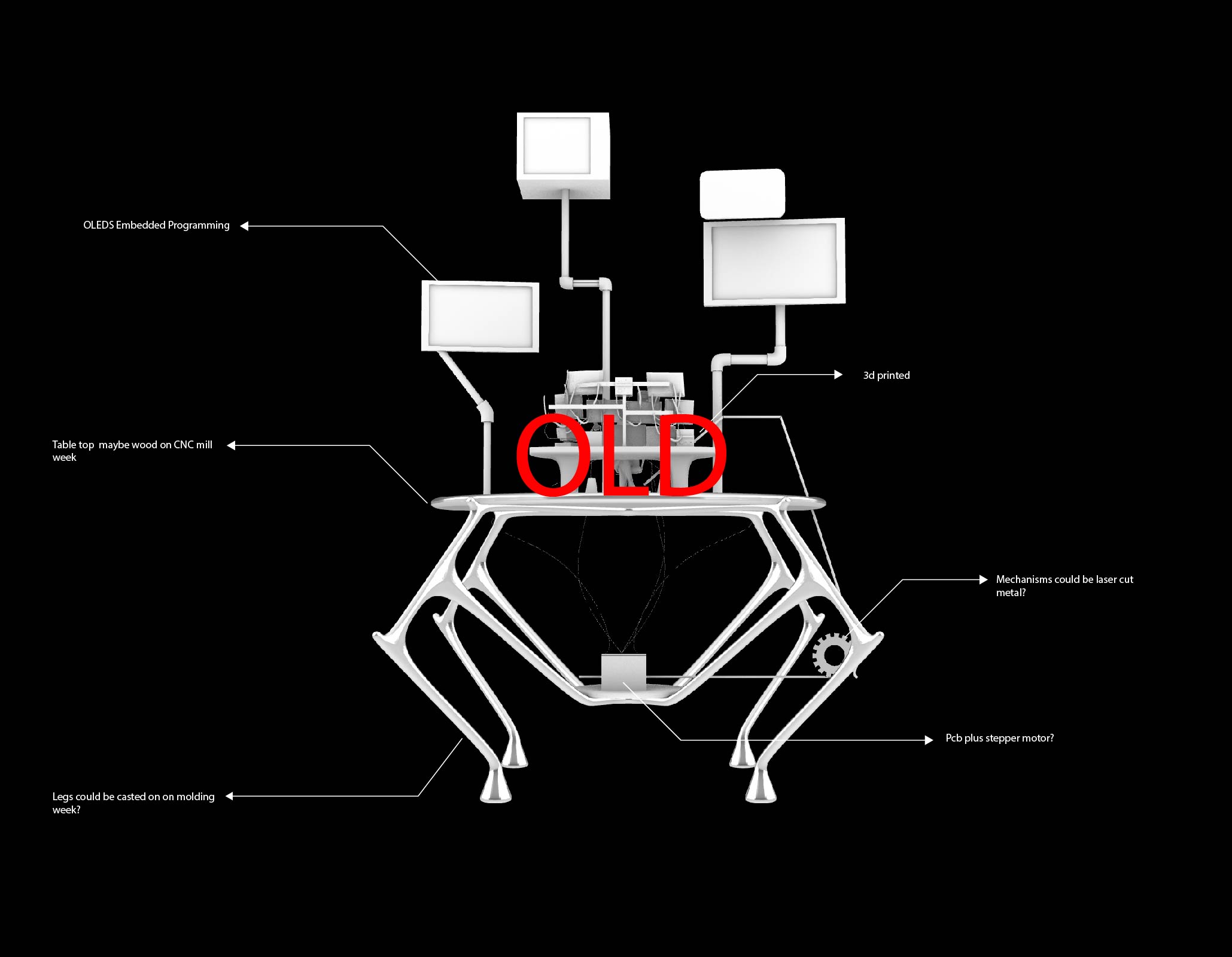
Image of the projects intended materiality! for now..

Process of building the mold for the legs

Resin Casted

I completely broke the foam mold when de-casting the leg because it got stuck I like the resin material because it is flexible and it provides me the movement I am looking for i just have to now find a better way to make the mold maybe OMOO?
inputs and outputs I tried to test different proximity sensors, motors and designs in order to make the running coffee table actually move. see below the experiments!
As you can see here the table was working on a smaller scale however when I scaled up last week for out put devices it stopped working because the table could not really carry its weight with the motor in place.. I realized then it was time to pivot and think a little more like an engineer rather than a designer and embed the movement within the legs..
I went ahead and re designed the leg with two servo motors in order to have two degrees of freedom and be able to control the joints of the leg I found some super helpful youtube tutorials on flexure design and compliant links here is one of them which was very helpful to start understanding how moving fixtures would work. see below the modelling of one of the legs, then I connected it to my board and with the help of my good friend chat gpt linked both of the servos to create a leg like movement.
Assembly Coming Soon!

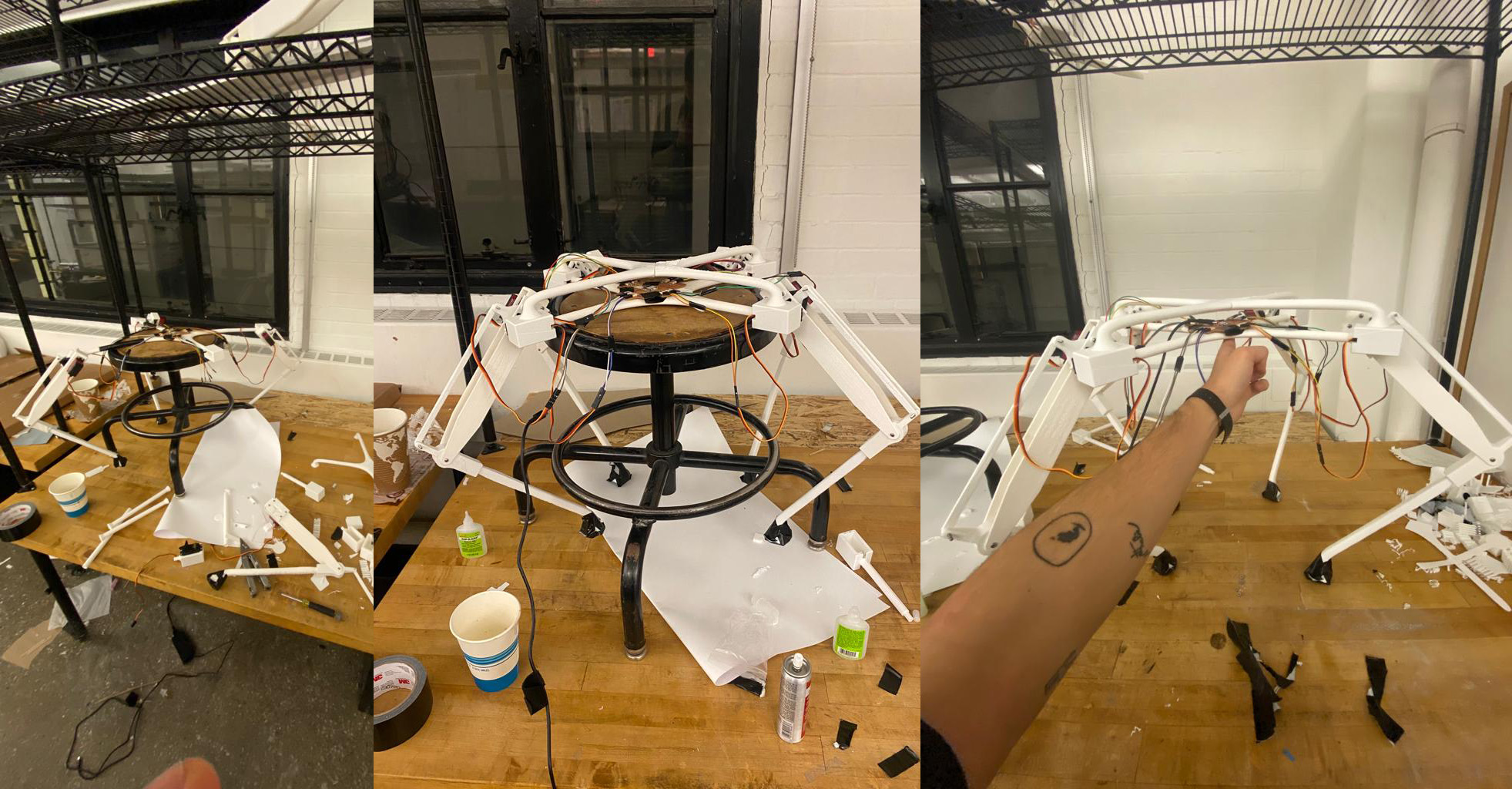
Okay, so if you are reading this and have gotten this far I shall trigger warning you that this is where all hell breaks loose on this project. I completely under estimated how hard building a moving mechanism would be, just getting it to stand was the biggest challenge and at this point is where the pain begins, first off if you are working with servos always make sure they are all by defauld at 90 degrees. and do NOT use glue, design everything for flexibility because you will fuck up and you will need to callibrate and re callibrate so switching parts became essential. Below are the first attempts at buiilding the coffee table.

Since I had even glued the servos to it thinking everything would work the first time (haha) rookie mistake I had to build it again. This time thinking about flexibility and making all the parts easy to assemble and dissasemble, this was however too unstable and would topple over because the motos where causing imbalances and the legs where way too large and far aways from eachother.

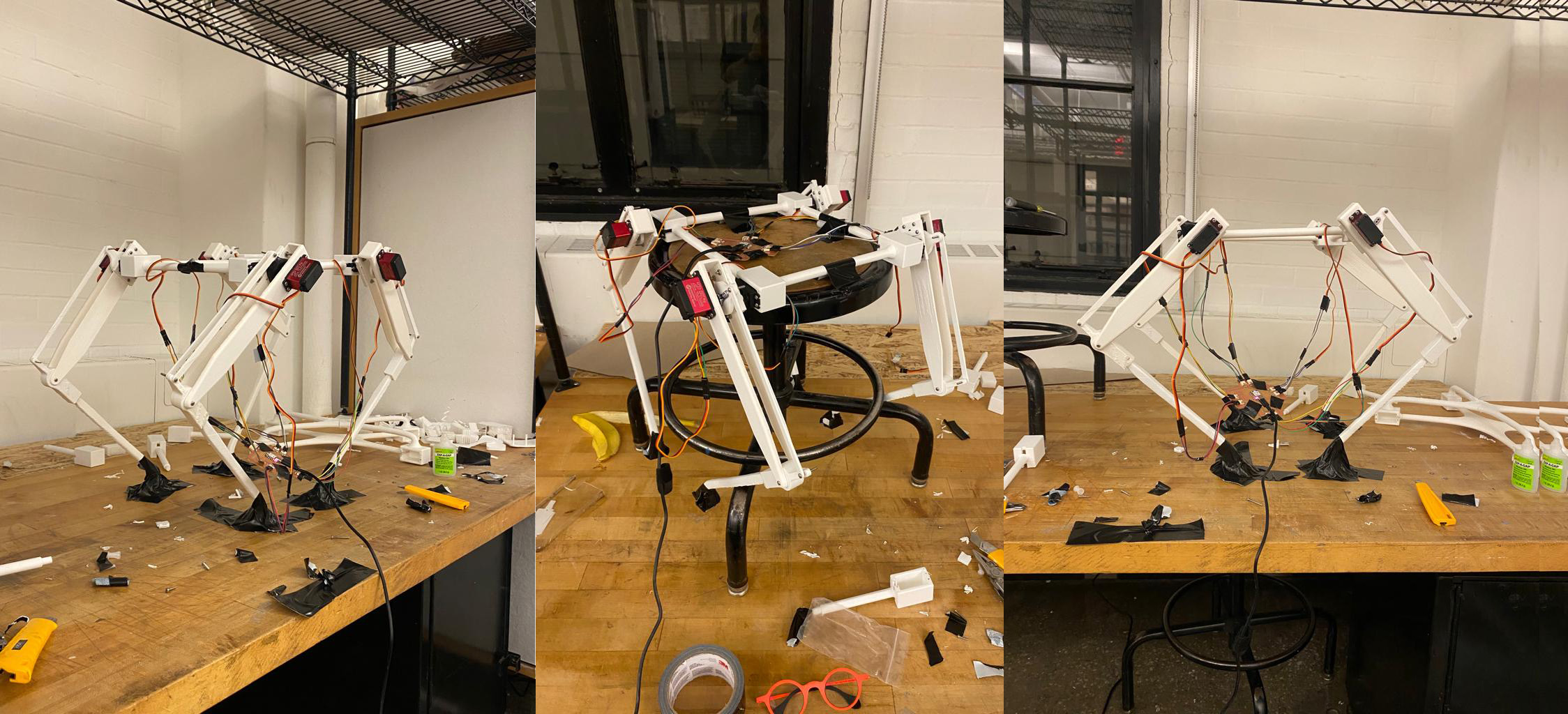
I then built it again and but shortening the length between the legs and implementing a bracing between them but it was still too unstable and could not stand. But since i had designed all the parts to be interchangable I had one more try on me which was to change the frame and make the parallel to eachother.
So after this final try I realized I was in a bit over my head because I had thrown everything I had to this guy and it would not even stand. So I decided to go back to the drawing board with less than a week left, but I did have some good parts of this working that was basically I knew my board could controll all of the servos and I coul make things move (kinda) so my only issue was an issue of scale so I decided to scale down and also do something a bit more mechanically designed and strurdy. And also look at other quadrupteds people had built in the past.
The first thing I did was rebuild the legs at a smaller scale and really precisely callibrate the servos for them to all be at 90 degrees. I then also tested the new linkages to see if they could actually move the legs in both directions.
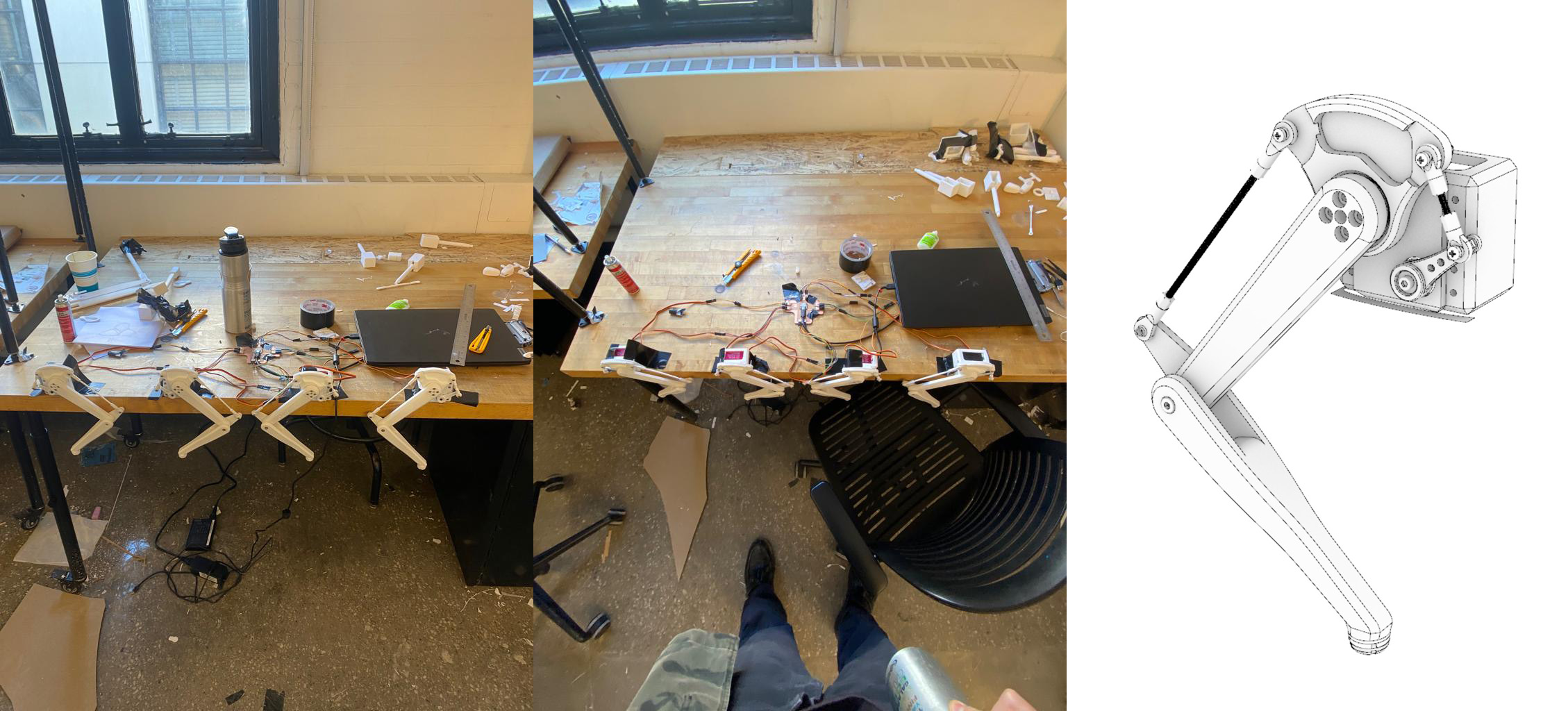
I then did something kinda dumb which was I 3d printed the body as a simple rectangle and glued it to the legs which breaks my rule from above of designing for flexibility but to be honest I was a bit desperate and was running out of time so I forgive myself for that one. but yea I then built the body with 8 25kg servos. which will eventually come and bite me back because it turned out to be so heavy.

Then I started to test the electronics on this bad boy! I made a quite simple board for it which is an rp2040 connected to the 8 servos to control the movement of each.

First attempt to make it walk! it doesnt really work and I then realized the body that I had 3d printed and glued was too heavy for the Servos to carry its weigh. But again it was too late to change it so I decided to change the narrative and make it a dancing coffee table and make it do movements that would balance the coffee.
This are the final movements The dancing coffe table was doing, I also had it do some squats and bend its legs but unfortunatley I did not document those! and with that I close this little chapter, what an amazing time and experience this class absolutely blew my mind and doing this little robot has been one of the biggest challenges Ive had at MIT so far, it did not work as I wanted it to or looked like I wanted it too even though I threw everything that I had to it and worked relentlessly towards it for the last couple of weeks. But I am still happy I managed to create something I had never thought of being capable of doing!