How to Make Almost Anything > John's class Homepage > Final Project Presentation
Final Project: presentation
Legatos: “Legos” for SoundPhysical Modular Sound Blocks for sound and music
I
created a set of physical blocks, each with a special property for
manipulating sound. The physical blocks are then mapped to virtual blocks in
an open-source software
synthesizer called PD. My set of blocks is just barely large enough to
illustrate the idea of being able to mold sound physically and interact with
sound musically. In
my implementation, I designed 2 ultrasonic sensor blocks, 1 LED block and 5
sound manipulation blocks. All blocks use the Atmel Tiny15. The blocks do not
themselves manipulate sound. They only poll each other using a Depth First
Search so to discover their relationships. I did a simplified version of the
protocol I described in earlier pages on this website. Some
of my motivation for this project came from my desire to make a sound
environment similar to Legos, where people can communicate powerful idea and
at the same time play, learn, explore and design creatively. Ideally, I
imagine my sound blocks as an extension to Lego’s or a similar environment.
Therefore, I designed a shell for the blocks which fits with Legos. Here is a
block resting on its shell, which is attached to a real Lego:
To
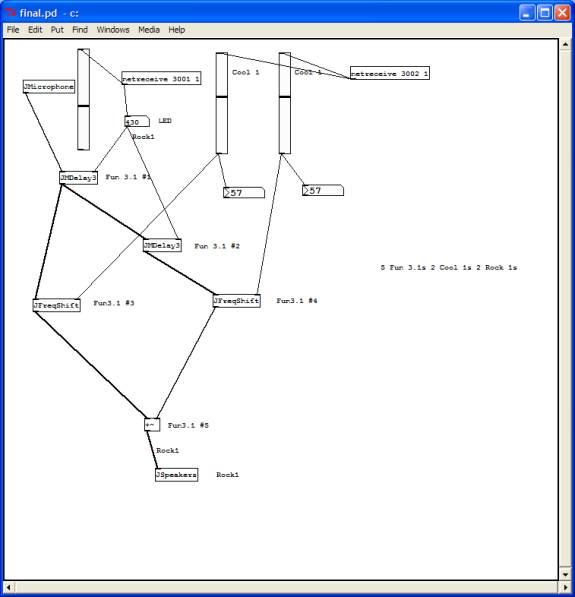
illustrate my idea, I set up a very simple PD environment to model. Here’s a
picture of the virtual world from PD which I wanted to recreate by modeling physically
and then constructing virtually:
The
comments written to the right of each virtual block is the name of the
physical block I created to implement it. The ‘Cool 1’ blocks correspond to
the ultrasonic sensor blocks. The ‘Fun 3.1’ blocks are the sound manipulation
blocks. The Rock1 blocks convert between the 1-wire pseudo-UART I hacked up
and standard RS232. Here are the specifics of each block. This
example is a silly demonstration of pitch shifting and delay, all in real
time. All virtual objects are macros of PD primitives which I created to
closely model my concept of the physical blocks. In this example, there are 3
parameters, Delay, pitch shift 1, and pitch shift 2. As the user talks into
the microphone, the signal is delayed by the block which is commented LED.
Then it is played back with pitch shift given by the Cool 1 slider to the
left. The signal is then delayed again by the same amount and a pitch shift
is given by the Cool 1 slider on the right. By mapping these sliders to the
ultrasonic sensors on the microphone, it makes it possible for a user to
express themselves with their voice and then further alter there voice by
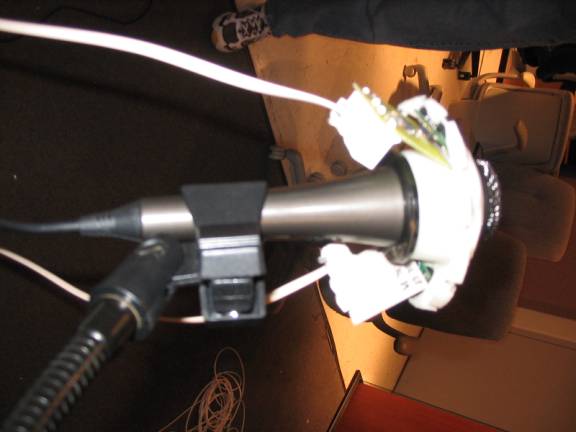
moving their hands around the sensors. I set up the sensors, one to the left
of the microphone and one to the right so the user could use one hand for the
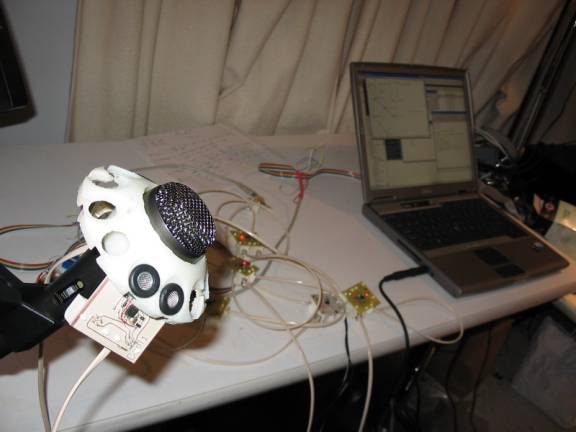
1st delay and another for the 2nd. Here’s
are two pictures of the ultrasonic sensors on the microphone:
Although
it is hard to see in these pictures, there is another identical sensor on the
opposite side of the microphone. The
Cool 1 blocks use Devantech SRF1- Ultrasonic sensors. The sensors communicate
using I2C. Implementation of I2C is made relatively painless as Atmel
provides code on their website, and it needs only very minor modiciations.
Note: Atmel calls I2C TWI as in Two-Wire-Interface. When a Cool 1 block gets
polled, it sends the last value it got from the sensor. It then Pings the
sensor so it will have updated information when it next gets polled. Besides
getting input from ultrasonic sensors, I created a block in which you can
dial in any value you want from –999 to 999 with 3 range settings i.e. you
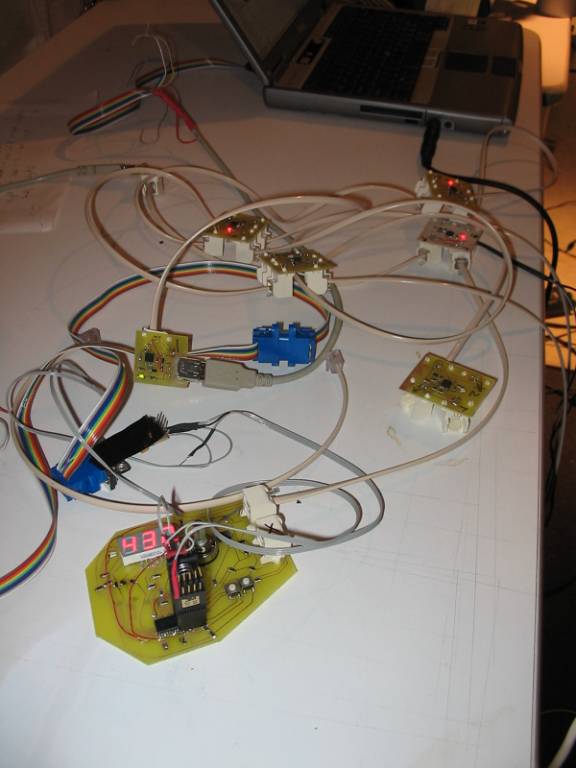
can move the decimal place of the readout. Here are 3 pics of the LED block. The 2 switches are for
adjusting the range and toggling the negative sign:
Here’s a video of my
officemate Victor trying out the complete system: Some
things I learned from doing this:
1. get everything ready to program as
usual. (clip, rx.py, etc.) 2. type the usual UISP string but DON'T
type --erase and --upload if=<filename>. Replace those with
--rd_fuses. 3. You should get something that looks
like this: Atmel AVR ATtiny15 is found. Fuse Low Byte = 0x5c Fuse High Byte = 0xff Fuse Extended Byte = 0xff Calibration
Byte = 0x71 -- Read Only Lock Bits = 0xff BLB12 -> 1 BLB11 -> 1 BLB02 -> 1 BLB01 -> 1 LB2 -> 1 LB1 -> 1 4. Change the line in your code which
currently sets your RC clock speed to max so that instead loads in the
calibration value. In my case I changed : ldi temp, 0xFF ; maximum RC clock to read ldi temp, 0x71 ; calibrated RC clock 5. Set the b value in your code to 24.
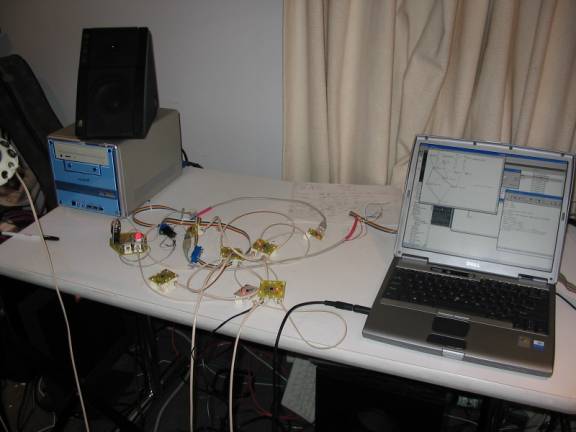
More
pics of the project:
|
|
|





 And
Here’s a video of the LED block in action:
And
Here’s a video of the LED block in action: