name: Jonathan Ward
class: How to Make (Almost) Anything
term: fall 2008
project: Output Devices
LED Array
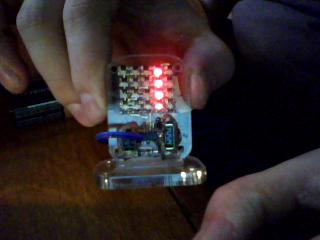
I made a flex version of the hello.array.44 board. It works. I'm trying to link this array and stepper motors to be driven by user input. I'm going to start with a simple button. When I get everything working from the button, I will move to a light sensor.
Stepper Controllers

This is a modified hello.stepper board with a button and LED. When the button is pressed, the LED turns on and the motor steps in one direction.
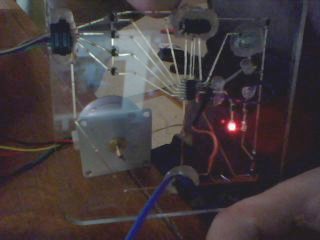
I redesigned the board with Eagle to have two LEDs and a button. The red LED is on by default, and when the button is pressed, the red LED turns off and the motor steps while the green LED is turned on. This works so on to the next steps.
next steps:
1)power supply I'm working with two motors. One is rated for 24v and the other for 12v. 9v works, but the motor is not as strong as it could be. I will also have to modify the pulse width modulation timing within the assembler code.
2)Stepper position feedback to the microcontroller, so it knows where the stepper motor is at all times, even if the microcontroller is turned off or mechanically misses a step.
3)Light sensor/button input to Stepper/LED output. Linking these four things.
4)Linking a stepper motor to an iris.