|
|||
|---|---|---|---|
| MAS.863.10 | Masoud Akbarzadeh | MArch | SMArchs | Computation | |
| How to Make almost everything | MIT department of Architecture | ||
| Home | | |||
| Final project proposal | | 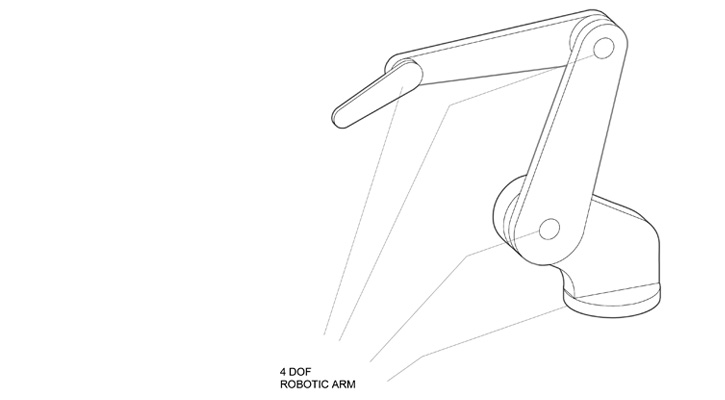 |
||
The main idea of the final project is to build a robotic arm with 4 degrees of freedom. the reason behind this is to learn how to make machines that can be controlled numerically and how to fabricate them.
|
|||
 |
|||
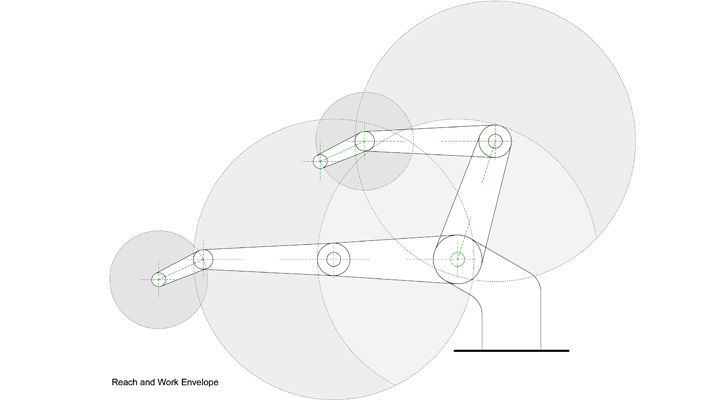
The reach distance of the robot arm describes the maximum distance that the robot arm can reach. Also the work envelope is the three dimensional envelope that the arm can make in the space around it.
|
|||
 |
|||
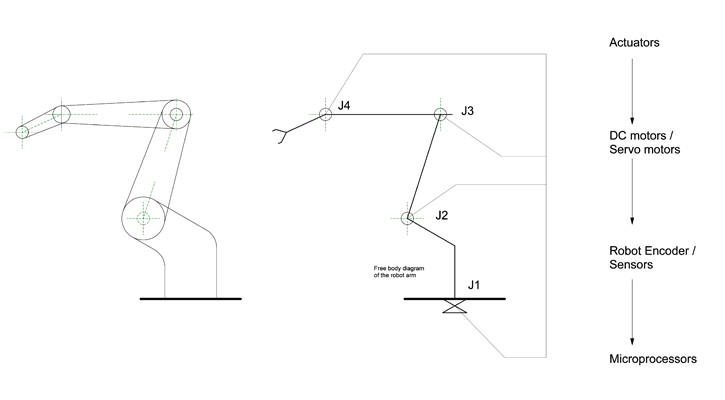
| This diagram show that for each joint or DOF there need to be an actuator or DC motor to move the joint. The amount of displacement can be measured by sensors which is calculated by the microprocessors. | |||
 |
|||
| All Rights Reserved 2010 | |||