About Saturday, I started feeling better, but a little dopey.
What Actually Happened:
Saturday:
I started looking at the
output from previous runs and started
debugging. The following improved the results: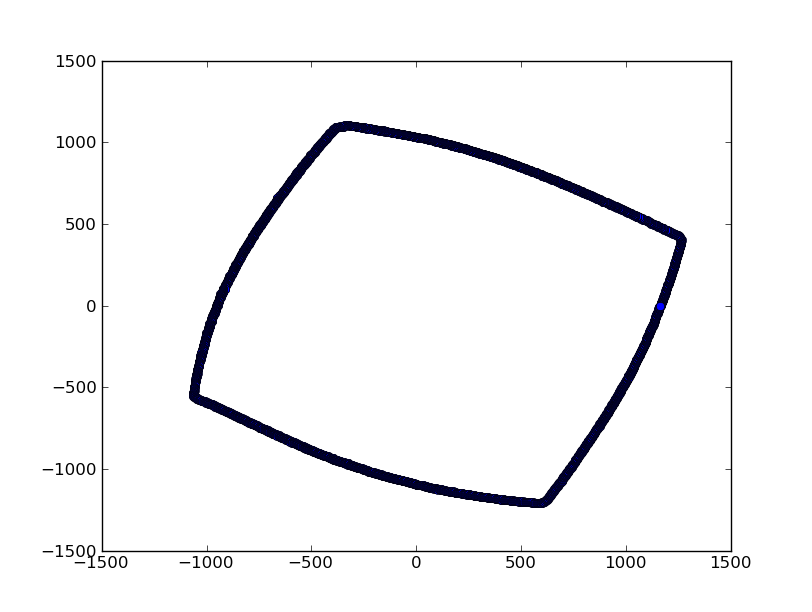
- Split the scan and the data plotting into two separate
programs. One reads the log from the other.
- Calibrate the machine -- It is 4000 counts per revolution, and
about 500 counts per inch of the analog sensor
- Verified the linearity of the sensor (1%).
Looked at repeated scans to confirm no drift. None found,
highly repeatable. Read error typically 5-15 counts
per 1000 units.
- Play with step speed -- found bugs in the stepping routines that
were interfering with the command parser. Higher speed
seemed like smoother output, but may be electrical noise issue.
The 5+ from the USB appeared to be wandering a bit.

- Change scale of input, and use internal reference.
- Verified graphs against raw data.

- Still wasn't quite satisfied that the output was useful -- stuff
looked a little too wrong, but measurements from the graph seemed
surprisingly accurate.
Sunday:
- Realized that the graph tool was auto-scaling.
This made any errors and distortions look worse than they otherwise
might be.
- Removed bad data, and understand limits.

- Decided to go with 3D and see how far I could get.
- Stripped Z slide from old semiconductor wafer robot.

- Researched servos, encoders and realized I would need to make
another board, or swap to steppers.
- Swapped the drive to a stepper.
- Mounted Z on the Theta table.
- Put a foot on it. Feet on the feet save on
crushed fingers.
- Packaged the electronics on it.

- Broke a driver, milled into package and reattached the connector.


- Orientation of the sensor matters.
- Blew all of the stepper drivers at about 2:00 am.
- Figured out that there is something wrong with the driver board I
built -- short?
- Debugged low torque, and programmed up the 8-fet board from
before to act as a unipolar step/direction interface.

- Tested, found low torque problem was the test motor I was using,
not the algorithm.
- Integrated to USB driver i/f board, remounted.
- Passed out.
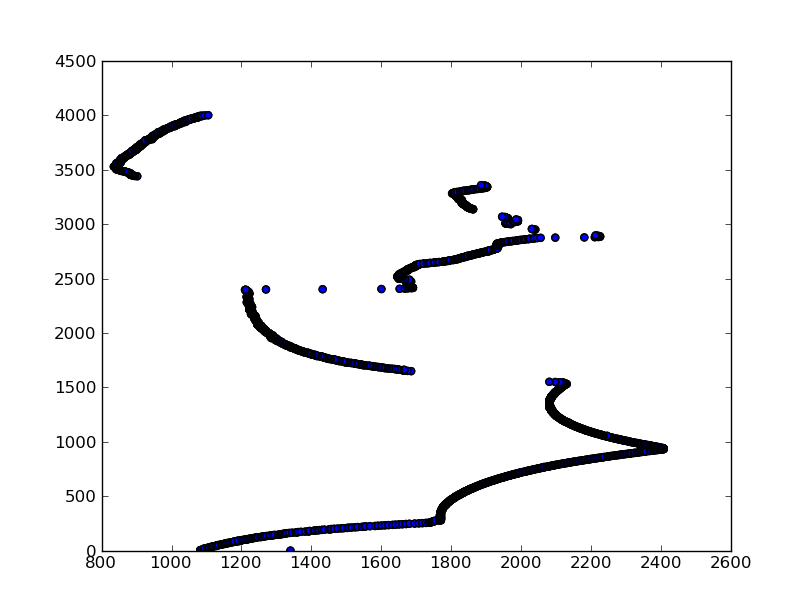
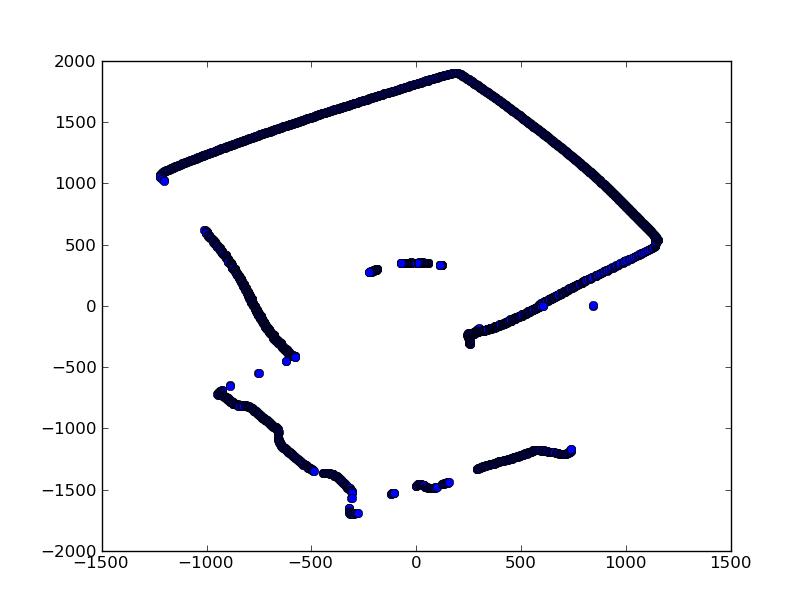
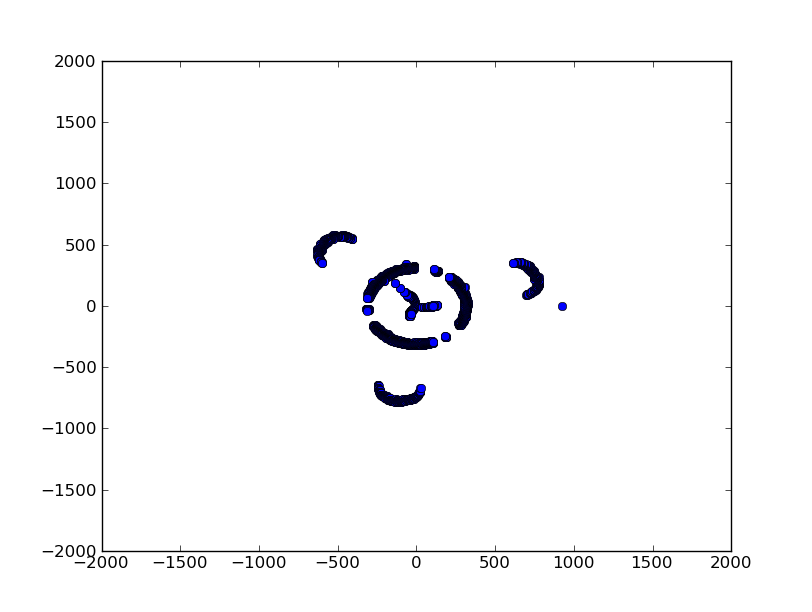
Results thus far:
- The sensor and table are accurate and repeatable.
- The sensor does not like black and/or reflective things.
- Currently, point mapping beyond the center is not correct.
- There may be some linearity problems with straight
lines.
Will it ever be 3D.... let's see how much code gets written between
9:30 and this presentation! (Probably not
much) Update: None, just this report!