
And now for something completely different...
This awesome piece of robotics is tenderly known as Kombusto the Dragonbot, part of the Personal Robots Group. If you wish to know more about it, talk to Mr. Adam Setapen; he'll tell you everything you need to know. However, my final project is not this robot, but rather, an accessory to it that will allow anyone to control its adorable squash and stretch movements. I propose a "sympathetic interface" a term coined by M.P. Johnson, et al, in a 1999 SIGCHI conference paper that describes the use of plush figures to control virtual characters. Except this time, it's going to control the robot.
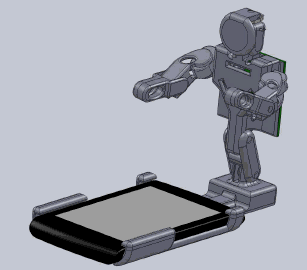
The function of this device will be very simple. Currently, the robot is controlled via a touch interface on a tablet that does preprogrammed gestures. However, if we wanted to have true freedom of expression, then the option of having a separate controller is necessary. What this device will do is allow the user to operate the robot as if they were actually moving the real robot. Hence, the controller itself will look exactly like Dragonbot, but smaller. It will be a haptic, passive mechanical system the relays potentiometer values to the robot, and control its motors accordingly.

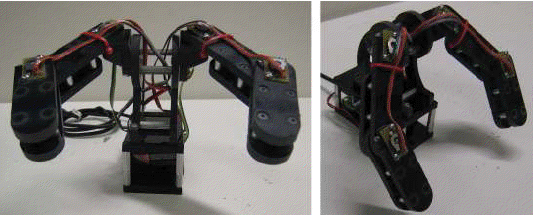
The controllers shown above are controllers that I have built for robotic projects. However, none of them were programmed by me. The last one shown has a blended PCB from two devices I did not create. Also, none of these are truly haptic; the last two have joints similar to action figures; the controller I propose to design would actually return to a "home" position. And none of these past controllers are really designed to control the movements of the Dragonbot platform. As this project will help me with developing another controller, it will be a great project to create, and quite functional.
The main components that need to be developed are the following:
I will also be working closely with Mr. Setapen to make the necessary code to manage the information from the device.
The materials that I will be using will be either already available to us from the class inventory, or in our own (PRG) personal stock. I hope to not incur any additional cost for this project. Here is a list of projected materials: