Program a Micro-Controller.
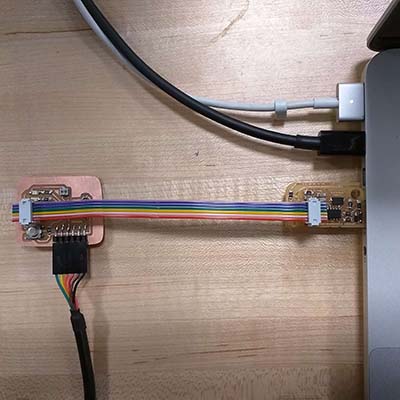
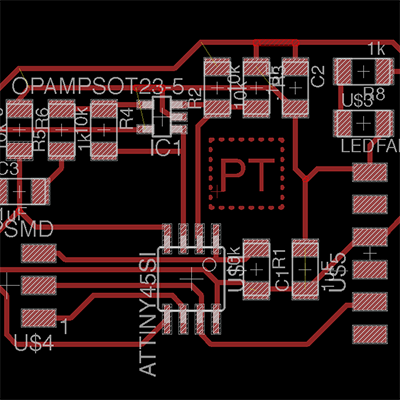
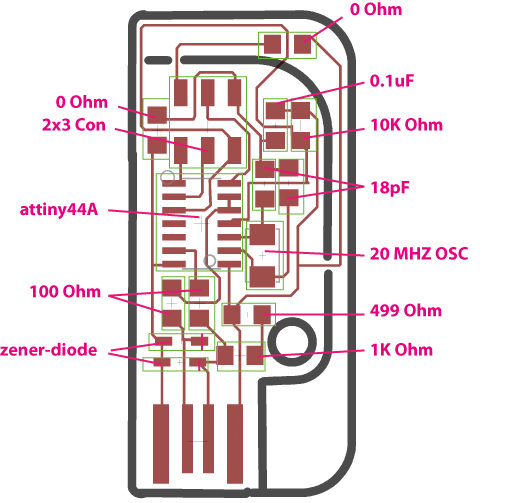
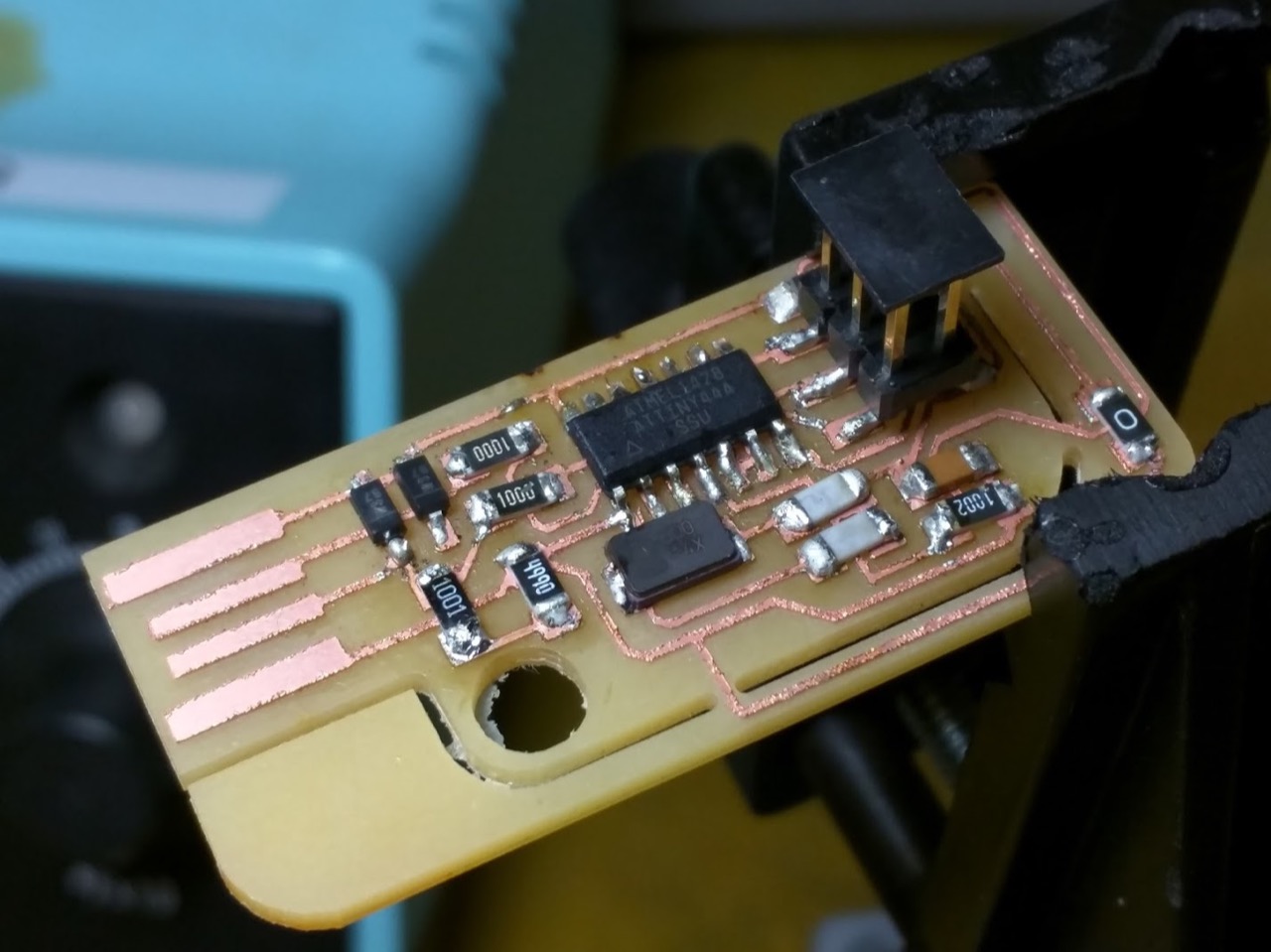
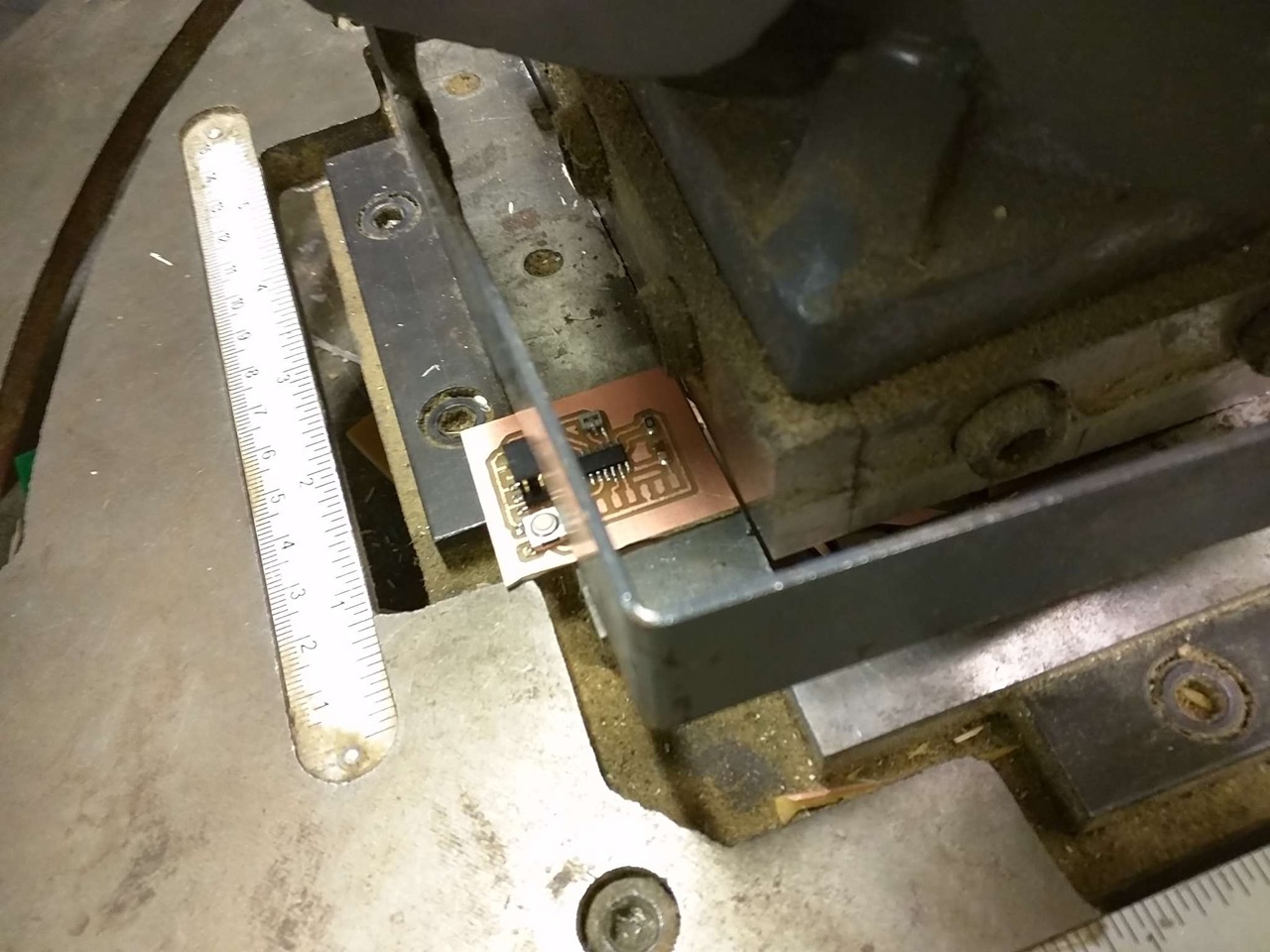
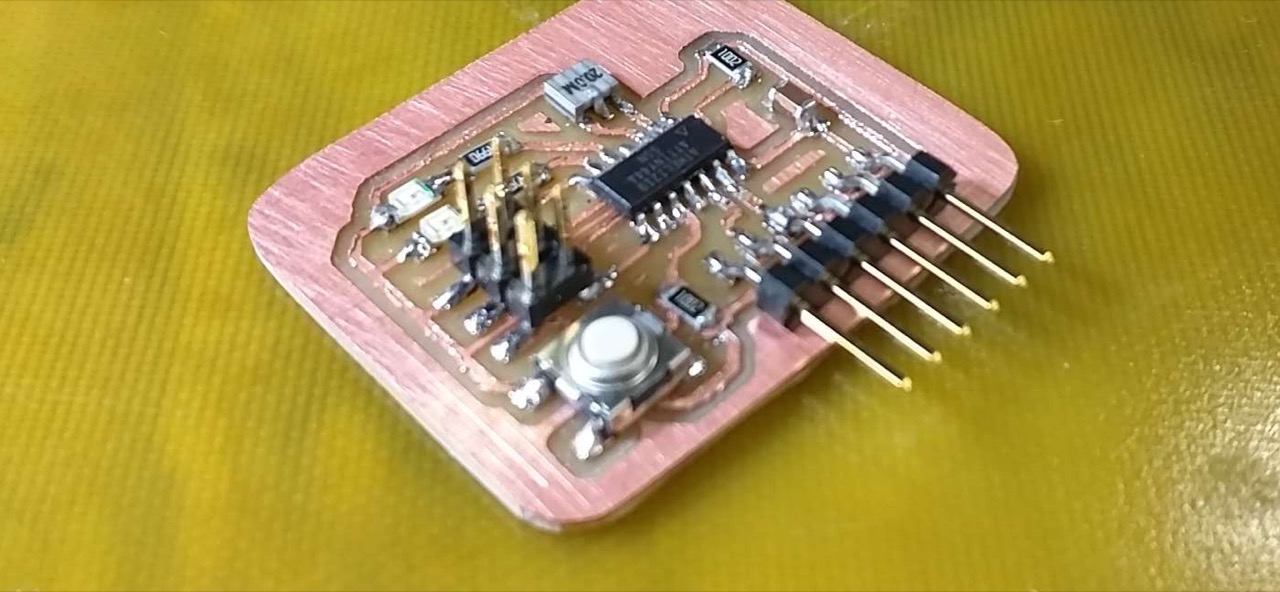
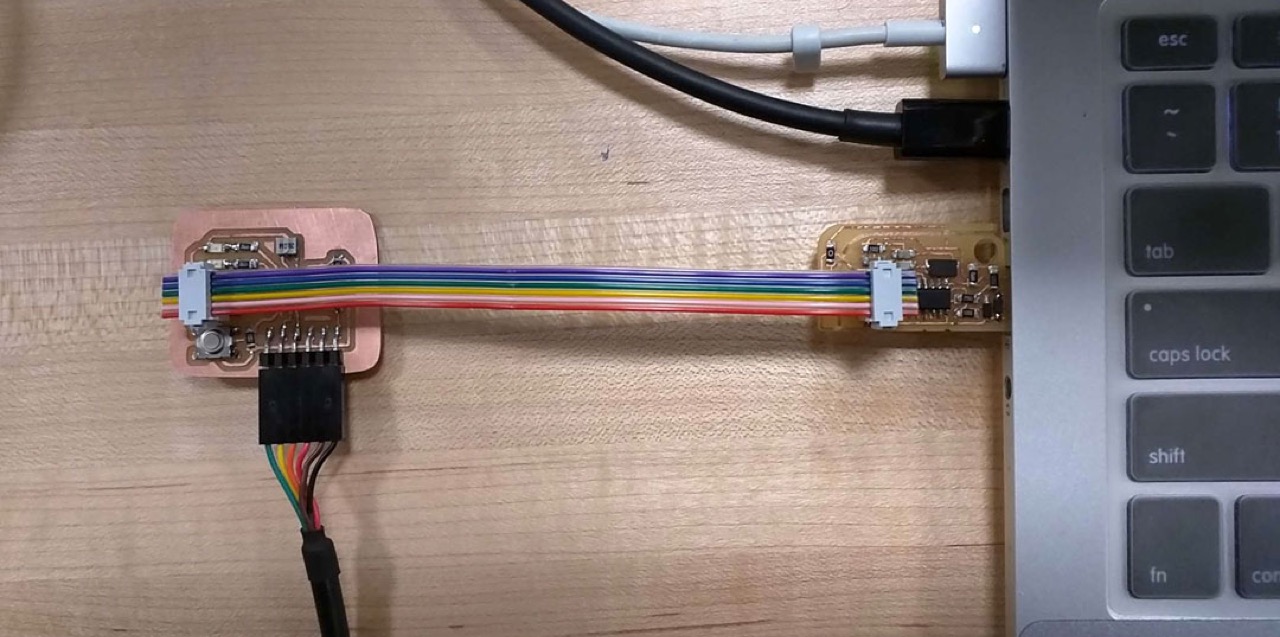
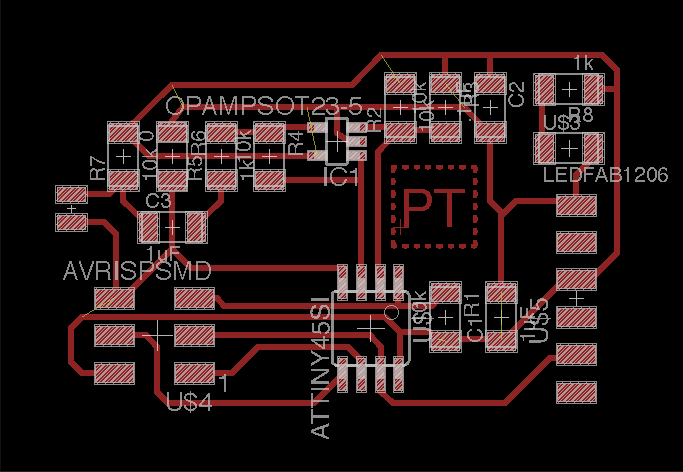
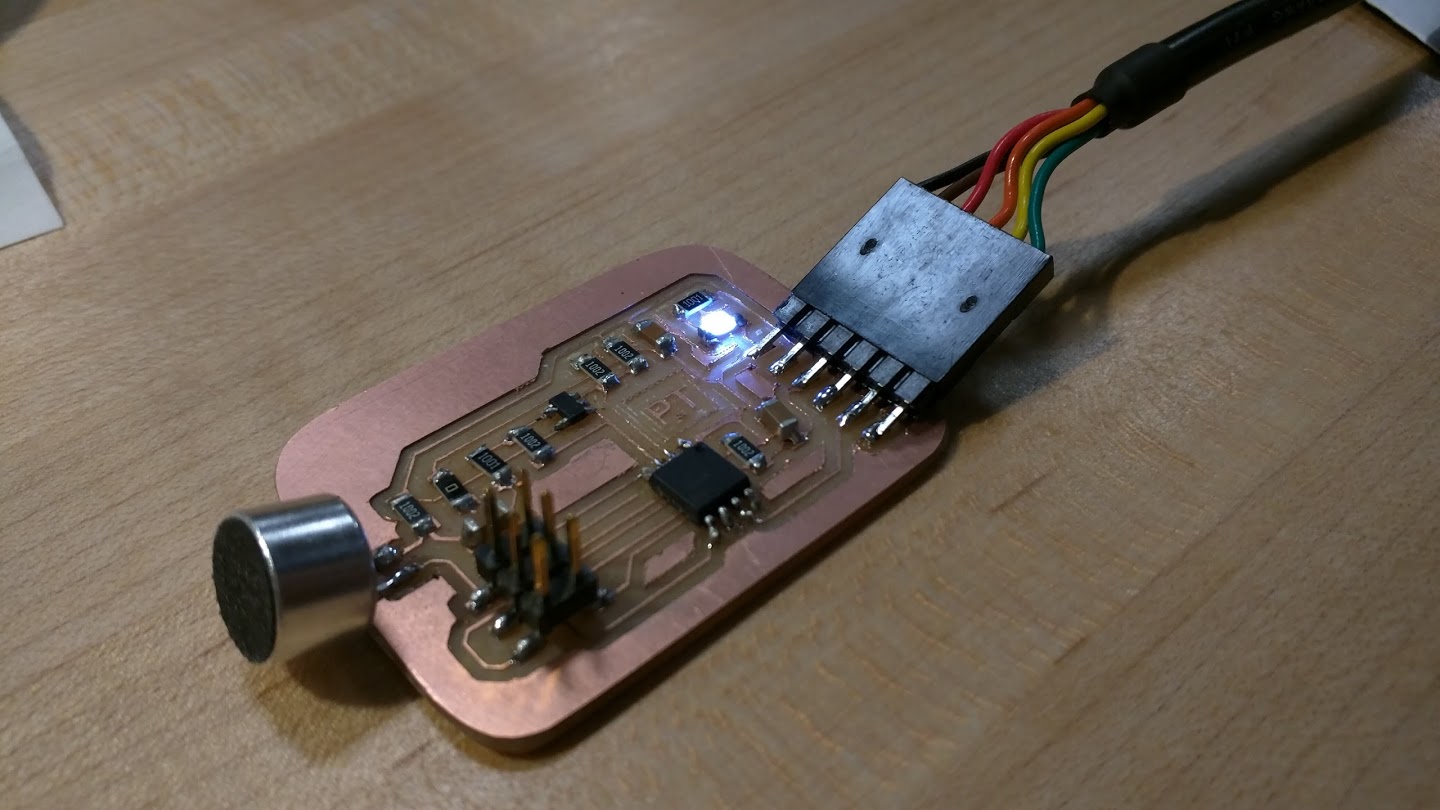
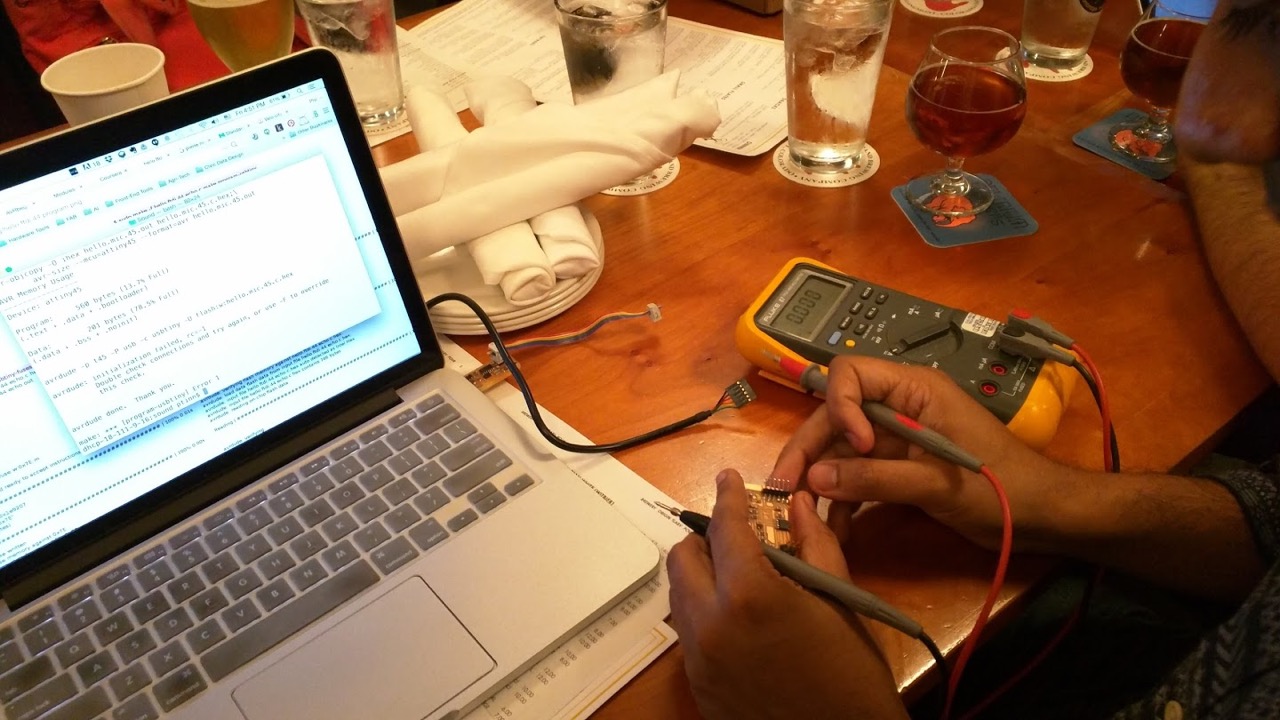
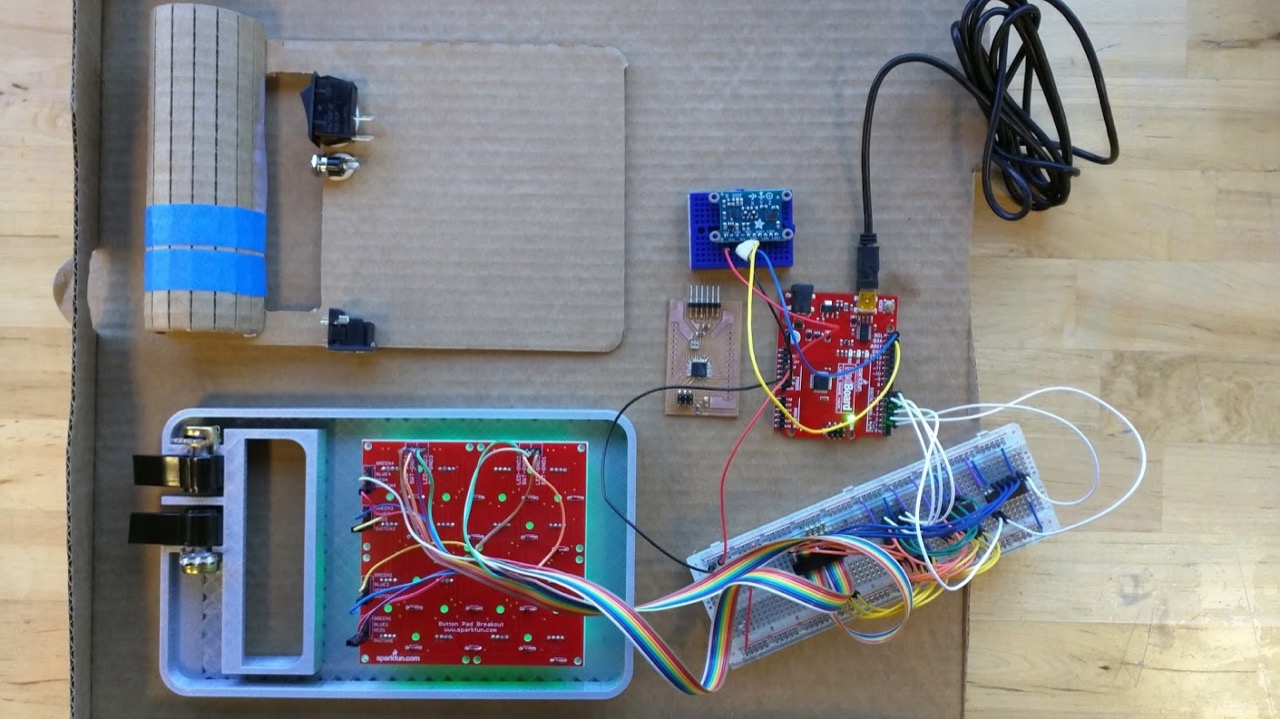
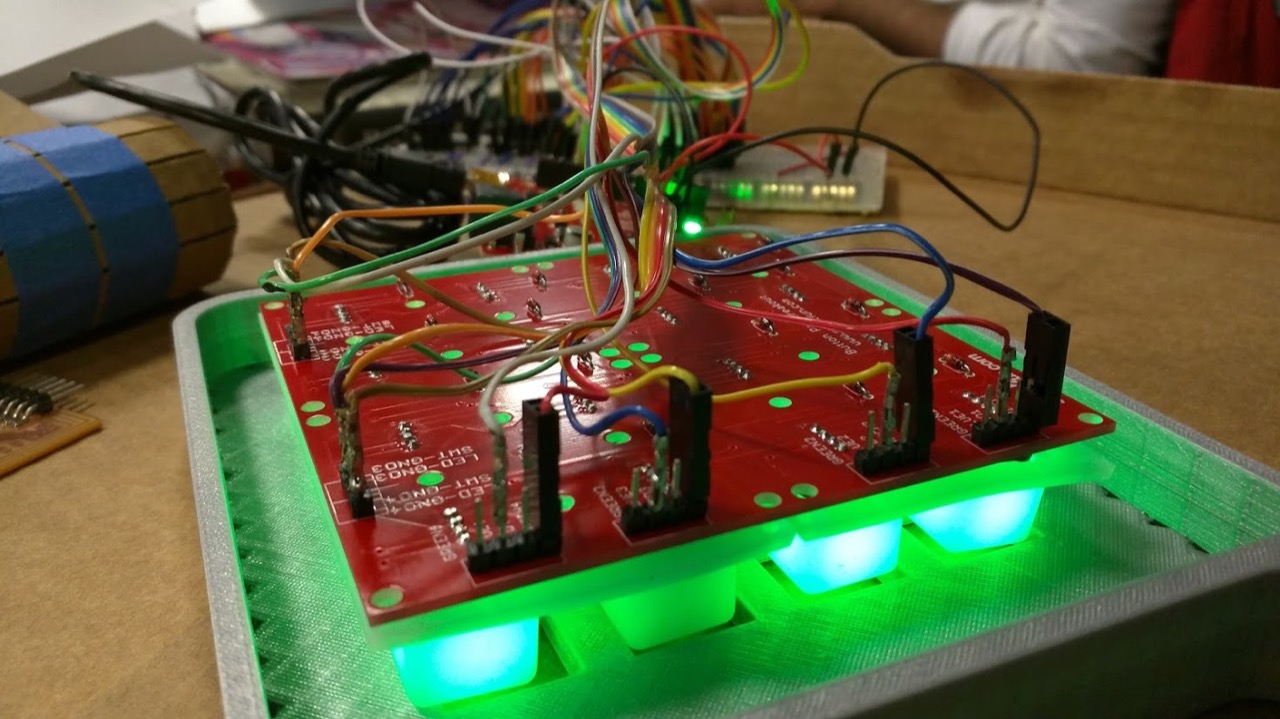
The goal this week is to bring intelligence to the circuit board. To do that, we connect the microcontroller we milled and soldered in week 6 to the AVR programmer we created in week3.
Setting Up
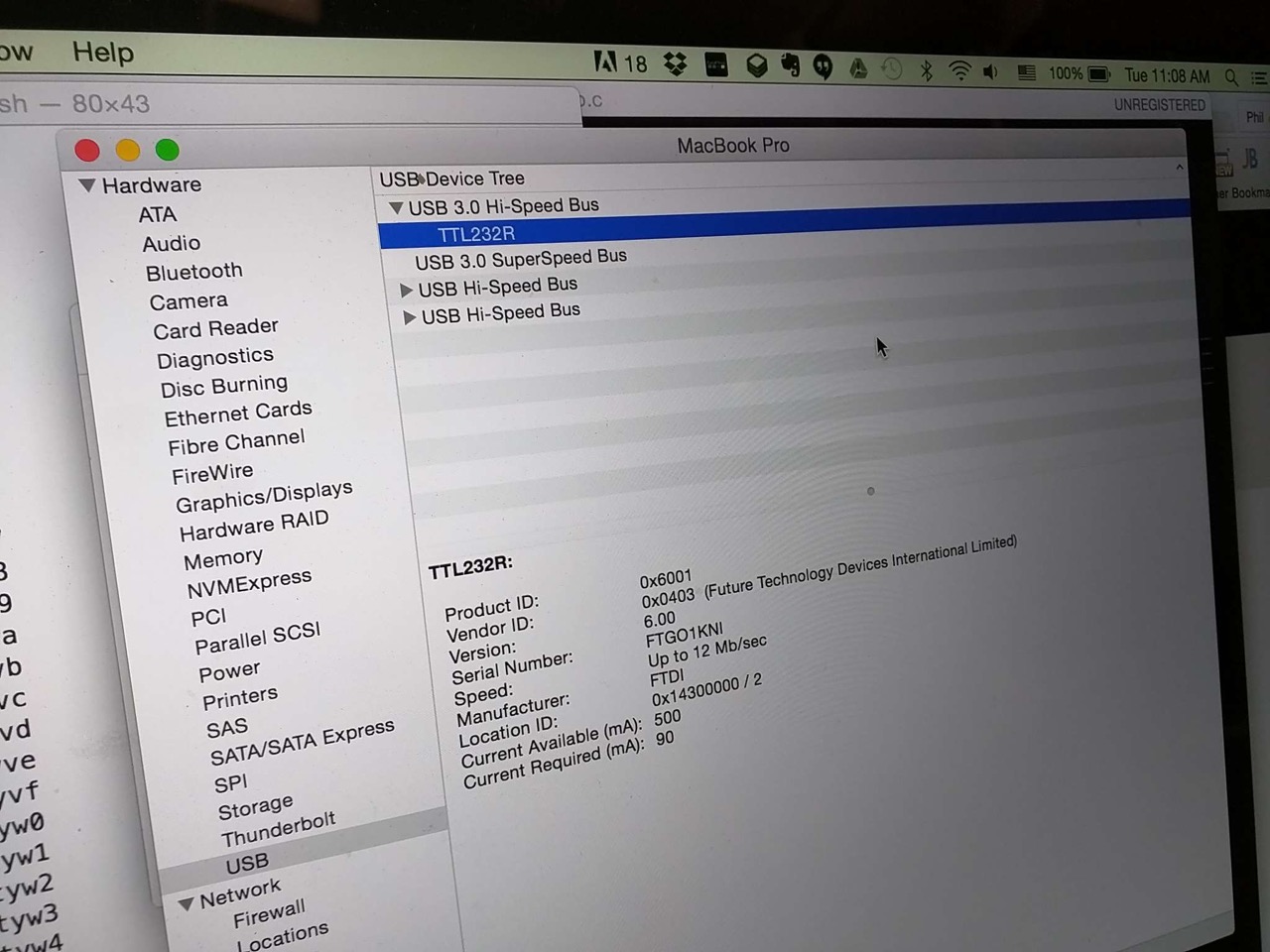
It's important to verify that both the FabISP programmer and FTDI Cable are being recognized by the computer

Key Commands
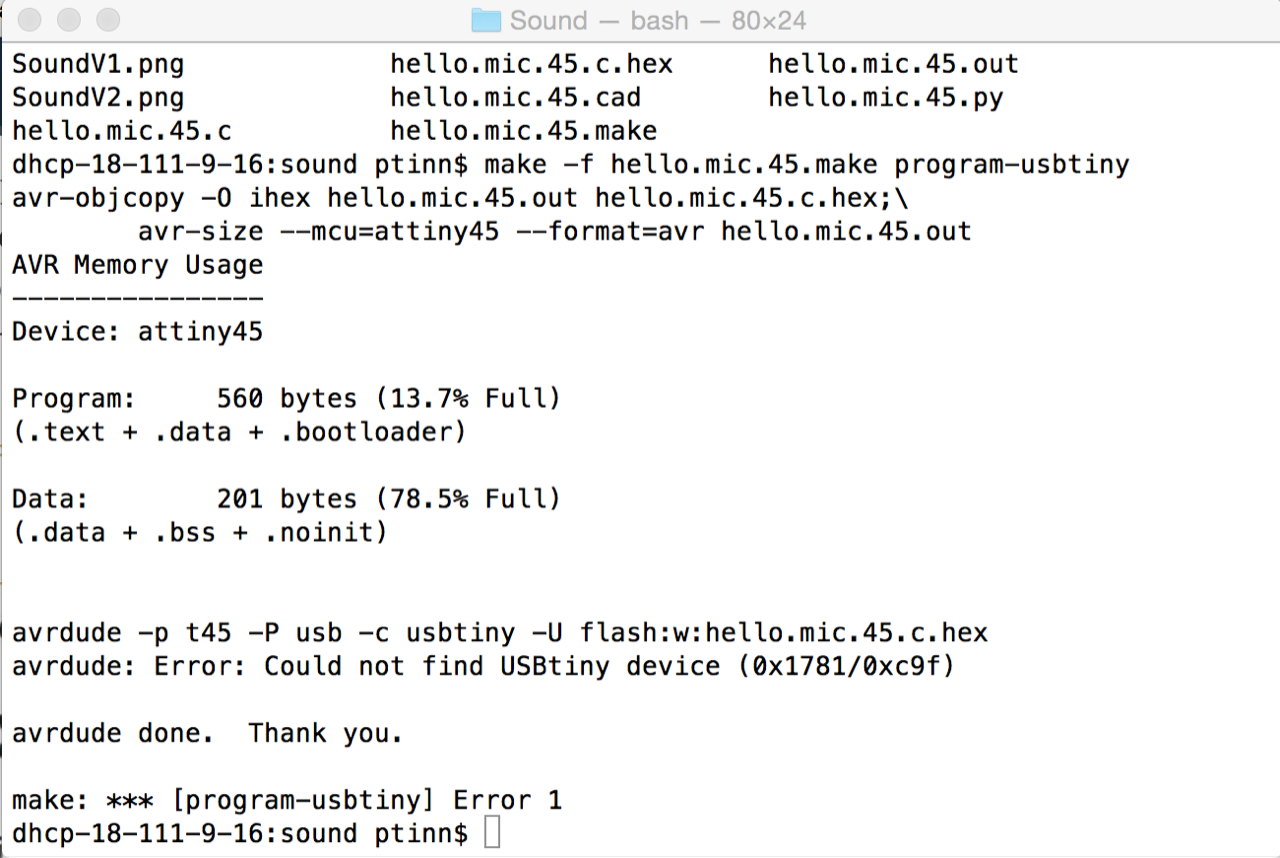
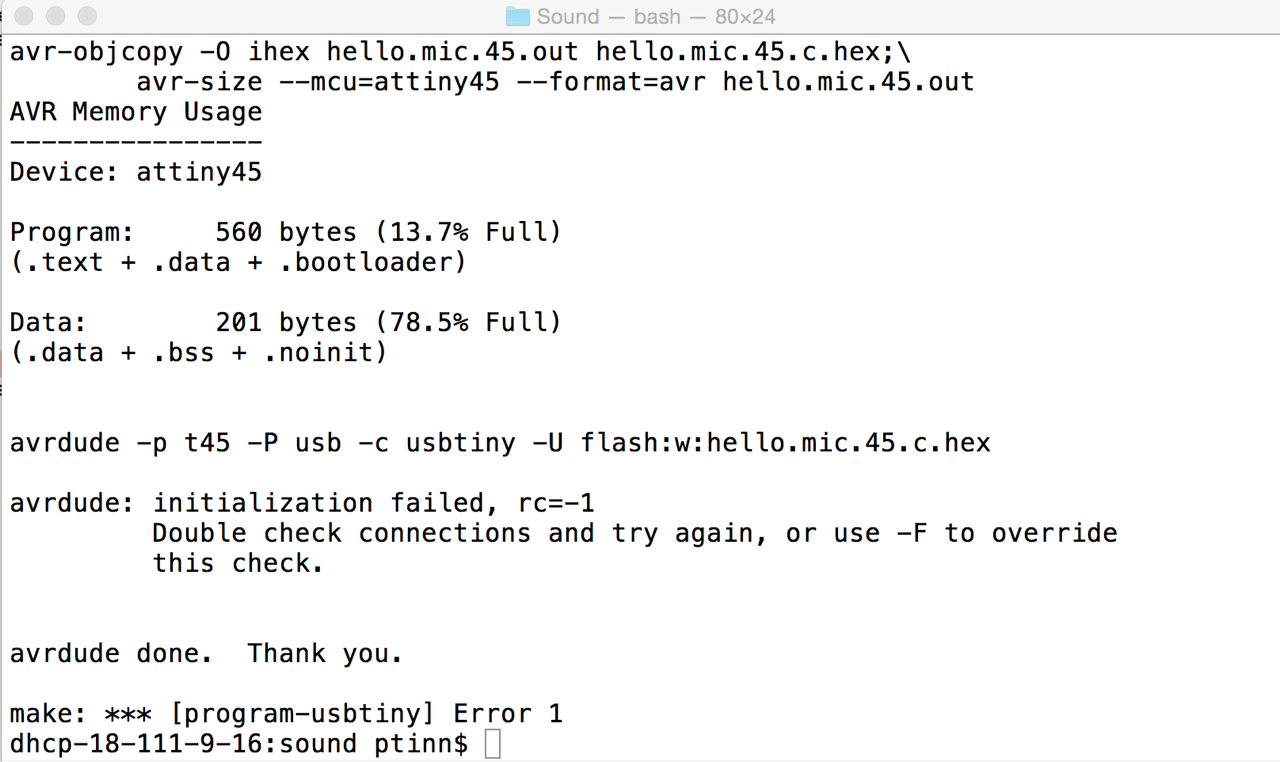
1. Convert C code into Hex: sudo make program-usbtiny
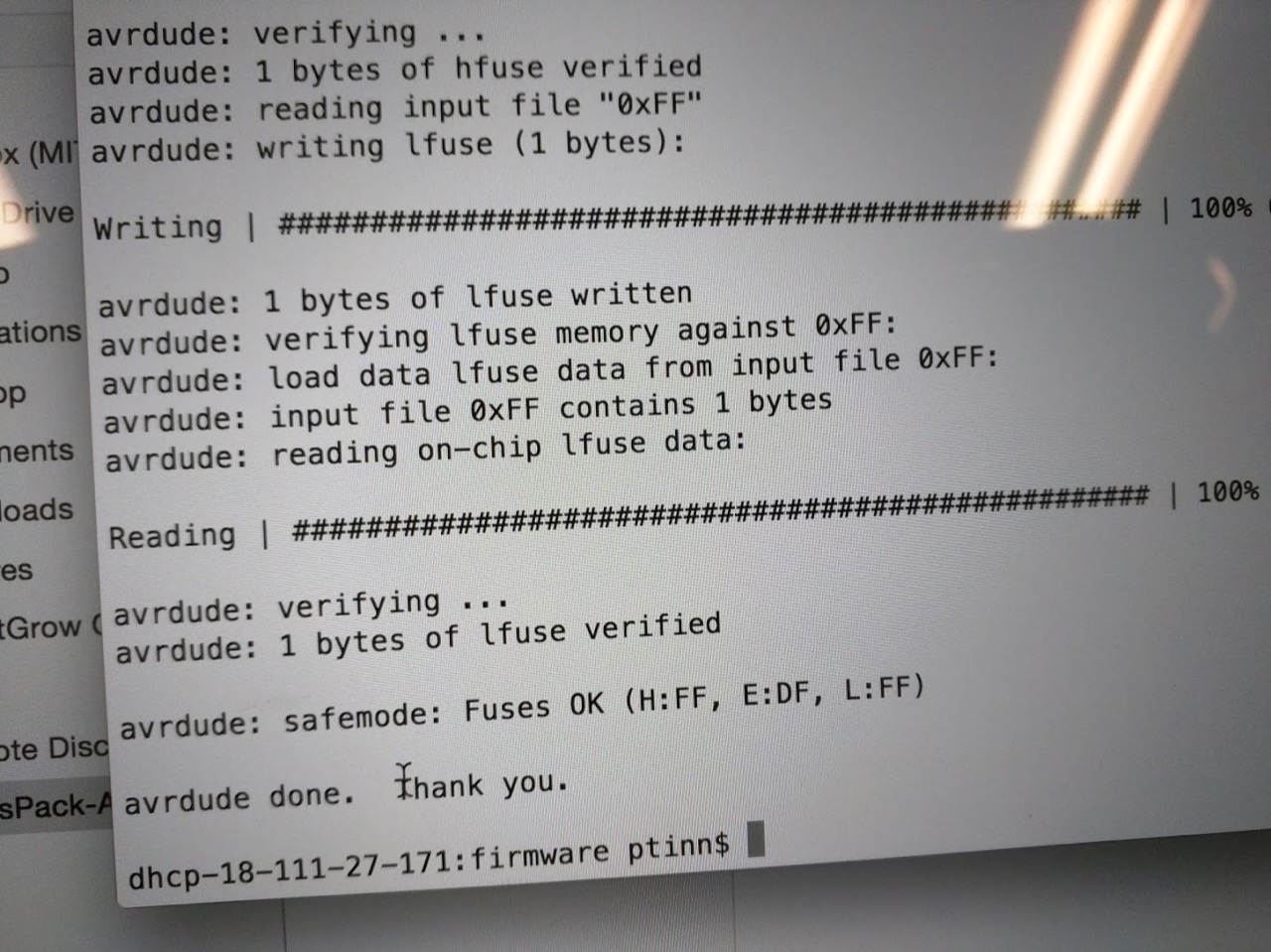
2. Prepare the programmer to write: make -f Makefile program-usbtiny-fuses
3. Write the Hex to the microcontroller: make -f Makefile program-usbtiny
4. Unplug the programmer from the microcontoller
5. Look up serial port number: ls /dev/tty*
dhcp-18-111-2-197:ep-hello ptinn$ ls /dev/tty*
/dev/tty /dev/ttysd
/dev/tty.Bluetooth-Incoming-Port /dev/ttyse
/dev/tty.Bluetooth-Modem /dev/ttysf
/dev/tty.iPad-WirelessiAP /dev/ttyt0
/dev/tty.usbserial-FTHBSO75 /dev/ttyt1
/dev/ttyp0 /dev/ttyt2
/dev/ttyp1 /dev/ttyt3
/dev/ttyp2 /dev/ttyt4
6. Run ahello world: python term.py /dev/tty.usbserial-FTHBSO75 115200
dhcp-18-111-2-197:ep-hello ptinn$ python term.py /dev/tty.usbserial-FTHBSO75 115200
Nov 4 10:28:14 dhcp-18-111-2-197.dyn.mit.edu Python[6509] <Error>: The function ‘CGContextErase’ is obsolete and will be removed in an upcoming update. Unfortunately, this application, or a library it uses, is using this obsolete function, and is thereby contributing to an overall degradation of system performance.
Exception in Tkinter callback
Traceback (most recent call last):
File "/Library/Frameworks/Python.framework/Versions/2.7/lib/python2.7/lib-tk/Tkinter.py", line 1536, in __call__
return self.func(*args)
File "/Library/Frameworks/Python.framework/Versions/2.7/lib/python2.7/lib-tk/Tkinter.py", line 587, in callit
func(*args)
File "term.py", line 45, in idle
wait = ser.inWaiting()
File "/Library/Frameworks/Python.framework/Versions/2.7/lib/python2.7/site-packages/serial/serialposix.py", line 449, in inWaiting
s = fcntl.ioctl(self.fd, TIOCINQ, TIOCM_zero_str)
IOError: [Errno 6] Device not configured
Exception in Tkinter callback
Traceback (most recent call last):
File "/Library/Frameworks/Python.framework/Versions/2.7/lib/python2.7/lib-tk/Tkinter.py", line 1536, in __call__
return self.func(*args)
File "term.py", line 31, in key
if (ord(key) == 13):
TypeError: ord() expected a character, but string of length 0 found
Exception in Tkinter callback
Traceback (most recent call last):
File "/Library/Frameworks/Python.framework/Versions/2.7/lib/python2.7/lib-tk/Tkinter.py", line 1536, in __call__
return self.func(*args)
File "term.py", line 31, in key
if (ord(key) == 13):
TypeError: ord() expected a character, but string of length 0 found
Exception in Tkinter callback
Traceback (most recent call last):
File "/Library/Frameworks/Python.framework/Versions/2.7/lib/python2.7/lib-tk/Tkinter.py", line 1536, in __call__
return self.func(*args)
File "term.py", line 31, in key
if (ord(key) == 13):
TypeError: ord() expected a character, but string of length 0 found
Exception in Tkinter callback
Traceback (most recent call last):
File "/Library/Frameworks/Python.framework/Versions/2.7/lib/python2.7/lib-tk/Tkinter.py", line 1536, in __call__
return self.func(*args)
File "term.py", line 31, in key
if (ord(key) == 13):
TypeError: ord() expected a character, but string of length 0 found
Exception in Tkinter callback
Traceback (most recent call last):
File "/Library/Frameworks/Python.framework/Versions/2.7/lib/python2.7/lib-tk/Tkinter.py", line 1536, in __call__
return self.func(*args)
File "term.py", line 31, in key
if (ord(key) == 13):
TypeError: ord() expected a character, but string of length 0 found
Exception in Tkinter callback
Traceback (most recent call last):
File "/Library/Frameworks/Python.framework/Versions/2.7/lib/python2.7/lib-tk/Tkinter.py", line 1536, in __call__
return self.func(*args)
File "term.py", line 33, in key
ser.write(key)
File "/Library/Frameworks/Python.framework/Versions/2.7/lib/python2.7/site-packages/serial/serialposix.py", line 518, in write
raise SerialException('write failed: %s' % (v,))
SerialException: write failed: [Errno 6] Device not configured
Code blocks generated using: http://hilite.me/