Hydro Reflective Caustics Mirror Ball
Hydro Reflective Mirror Ball (cube)
a disco mirror ball using caucstics effect with water
Concept
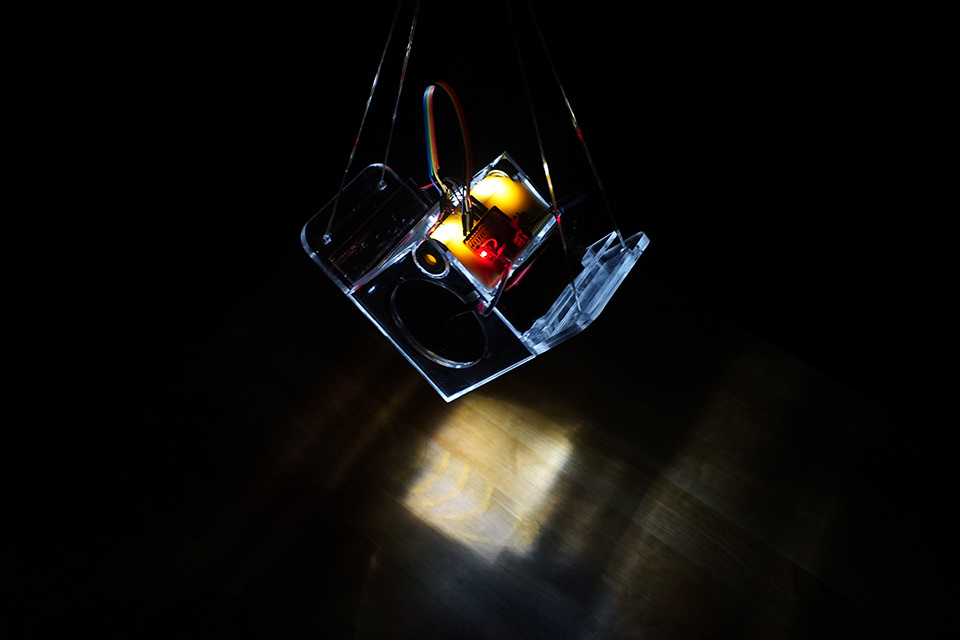
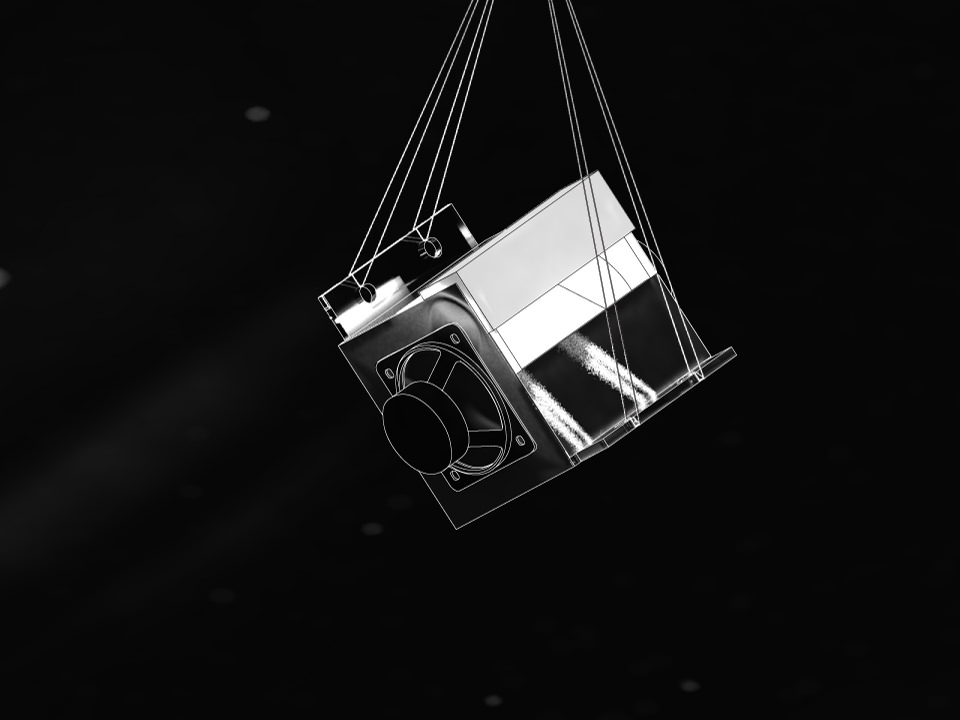
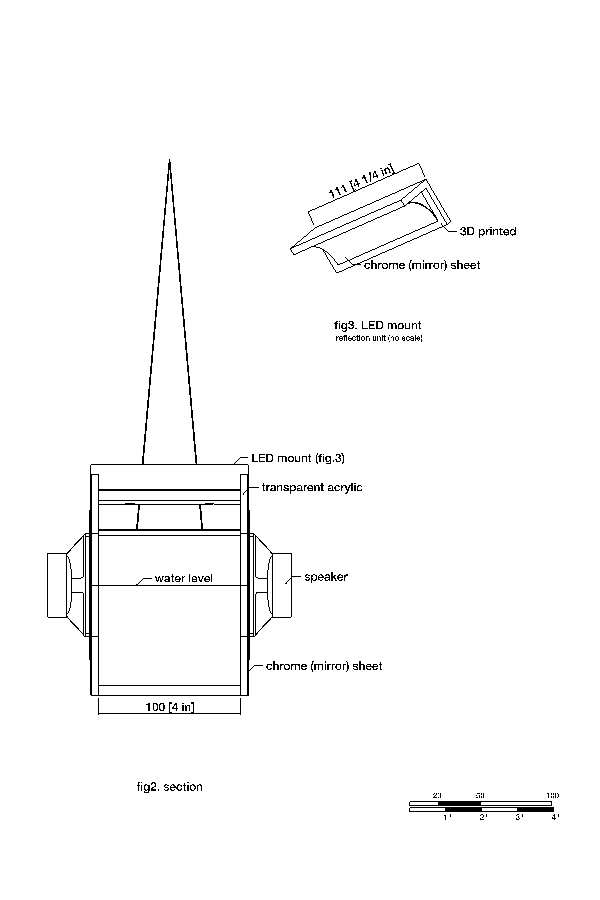
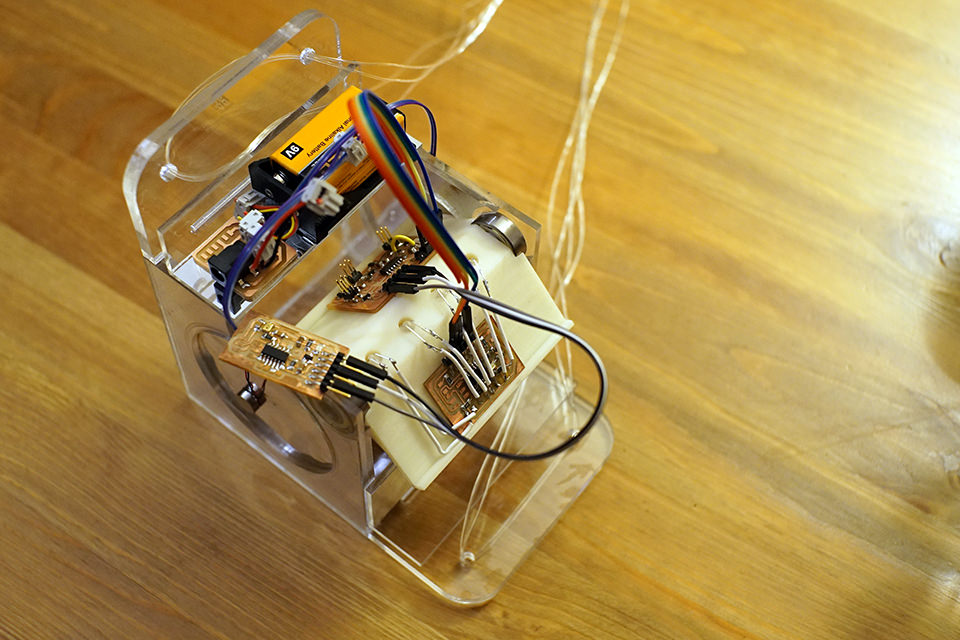
For my final project I decided to make something that functions as a disco ball, but uses water and the caustics effect for scattering light. It consists of a vibration unit and a bright LED with reflective and transparent materials.

Fig1. Traditional disco ball
Not only as a discotect utility, I thought that this will be a nice light source for my room, more over a handy thing to distract our baby that is expected in January. Fig.2 from Fig.4 shows a possible light pattern to be projected

Fig2. caustics effect example

Fig3. caustics effect example
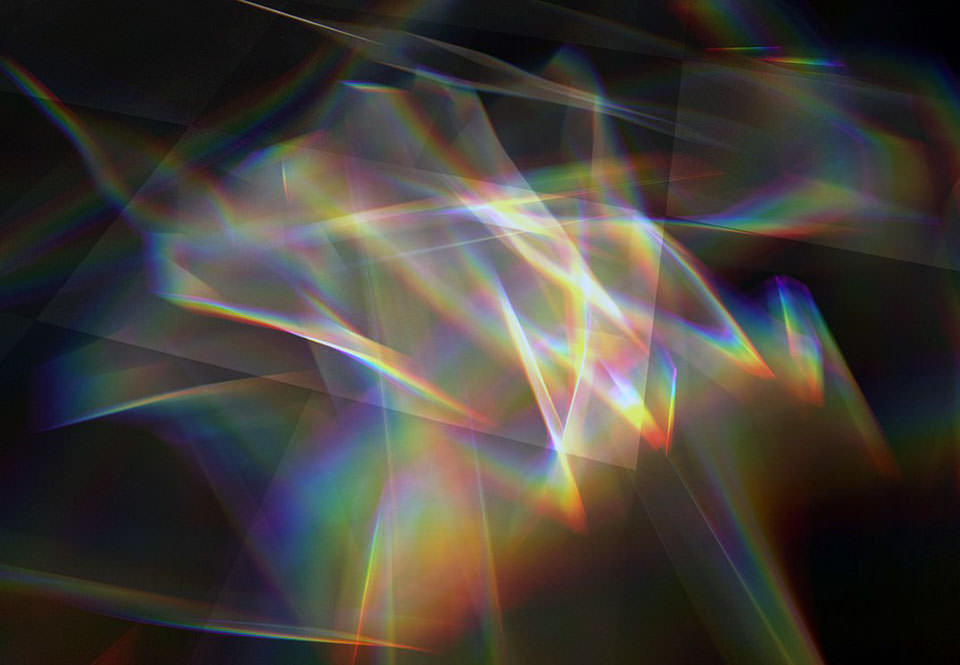
Fig4. caustics effect example














{kind=link}
{kind=link}
{kind=link}
{kind=link}