my first assignment is to model an idea for my final project:
every day on campus i see at least a few students painlessly riding skateboards to class while i stagger enviously one foot after another. if i make my own, i can wake up a few minutes later each morning and still make it to class on time and in style.
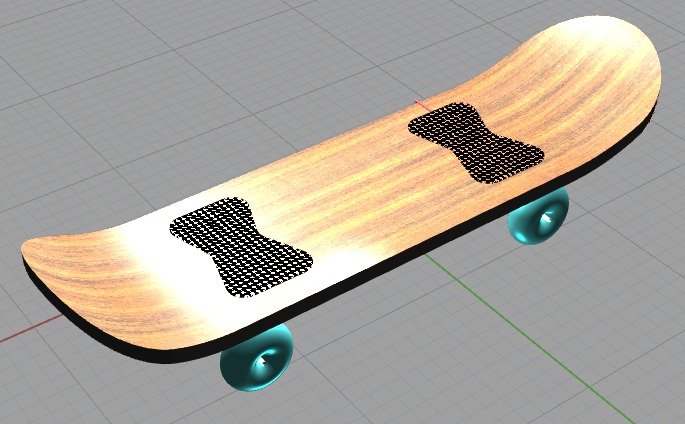
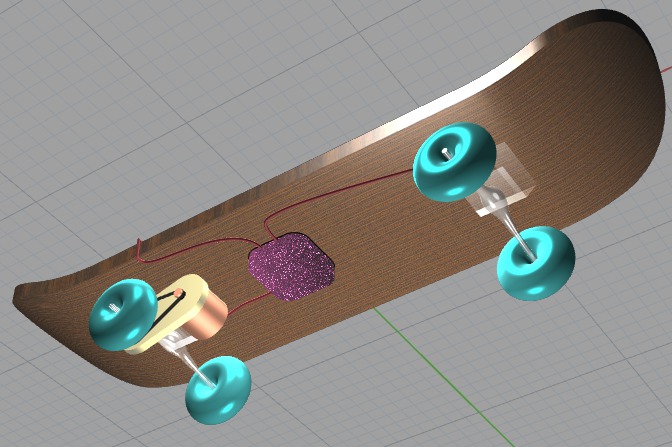
but if effortless is cool, then a motorized skateboard is even cooler. i envisaged a skateboard with two pressure sensors where the feet are supposed to be, that moves or brakes depending on the ratio of detected pressure at the two spots. thus by distributing more weight to the front leg or back leg, i can accelerate or decelerate, respectively.
i used rhino to create the following drawings:
notes:
i took screenshots of my workspace editor instead of fully rendering the drawing because no matter how much lighting i set up in the render preferences, the foot sensors turn out to be completely dark and i am too fond of that meshy stuff!
another thing i realized is that since the direction of the motor breaks the symmetry, i should instead make an asymmetric board (like those longboards that look like surfboards) that clearly points in the direction it goes.