
Motion
There two major mechanisms of the modular self assembling robot that I want to add motion to, the grabber and the self locking join. I decided to use the cheap and cheerful servos mechanisms to move all the parts, they are easy to replace and attach.
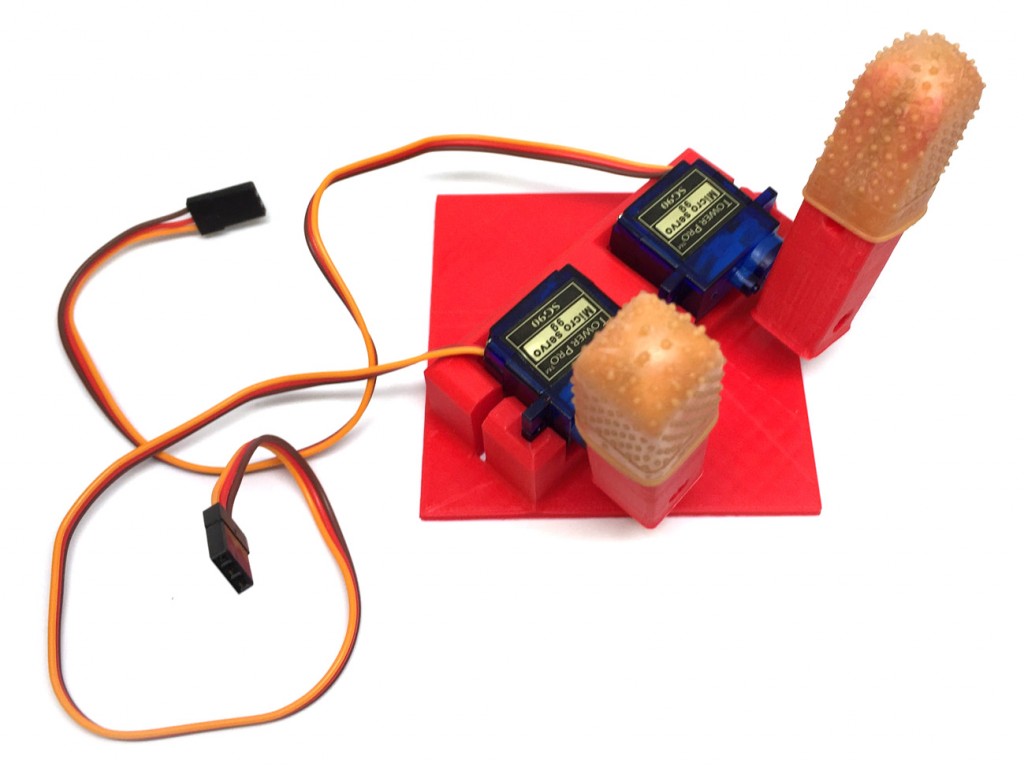
The grabber mechanisms
I designed these robotic fingers to fit the Rubber Finger Tips for better grips.

The mechanisms is fairly simple, using 2 servos to grab and release the objects.
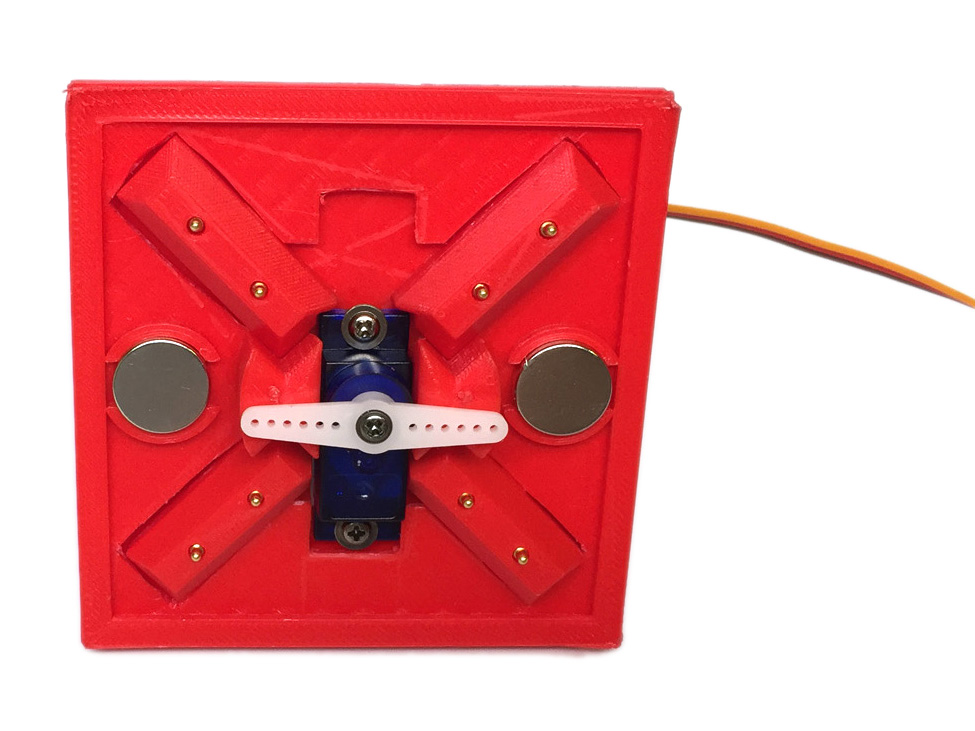
Self locking mechanisms, Redesigned
Lower Join
Upper Join

Pogo Pin contact points
Metal contact connector for pogo pins. GND, VCC, 2 signal wires. I milled the boards on Roland modela mdx-20.
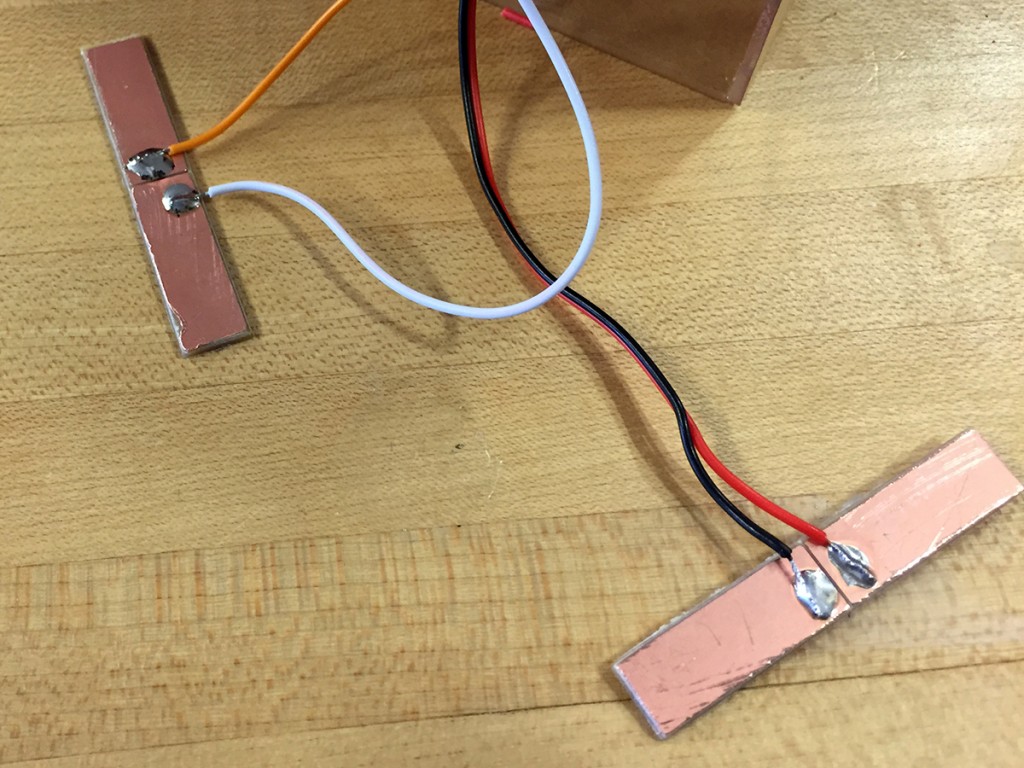
I glued them in position. I probably should make them a bit more flexible next time.
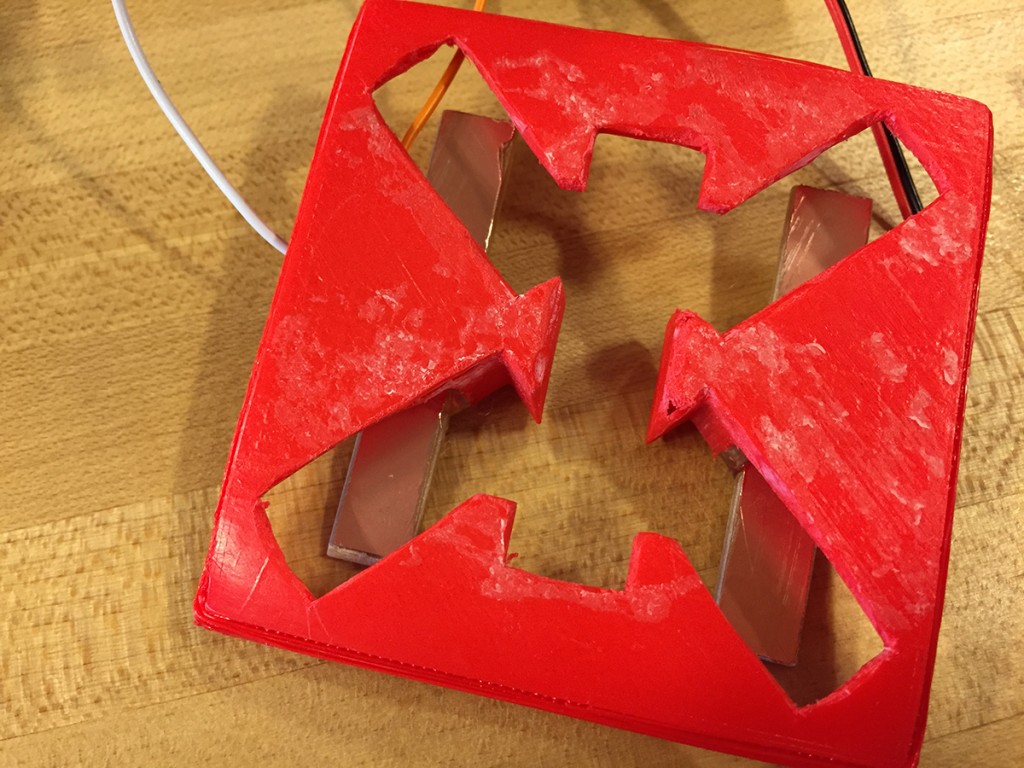
Putting it together
The clear box allows me to see the locking mechanism in action and pogo pins in contact.

Coffee Cup Test

Next Version
The grabbing function could be improved by adding pressure sensors on the tip of the robotics finger or adding current sensing circuits for the servos.