Self-Reproduction
My design is inspired by the Robotics Self-reproducing machines by Victor Zykov, Efstathios Mytilinaios, Bryant Adams and Hod Lipson.
http://www.nature.com/nature/journal/v435/n7039/full/435163a.html
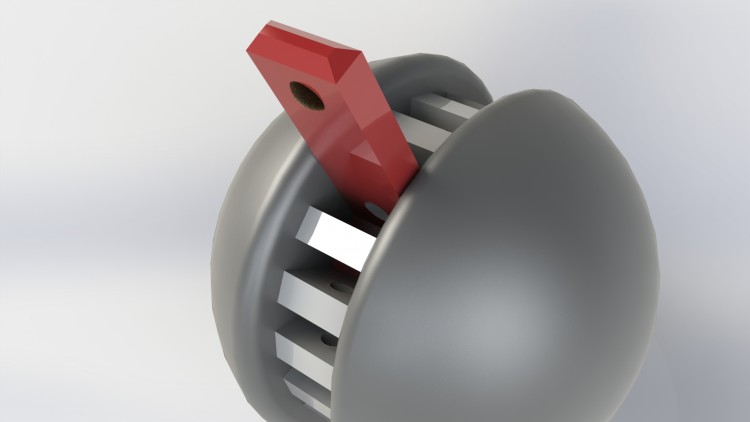
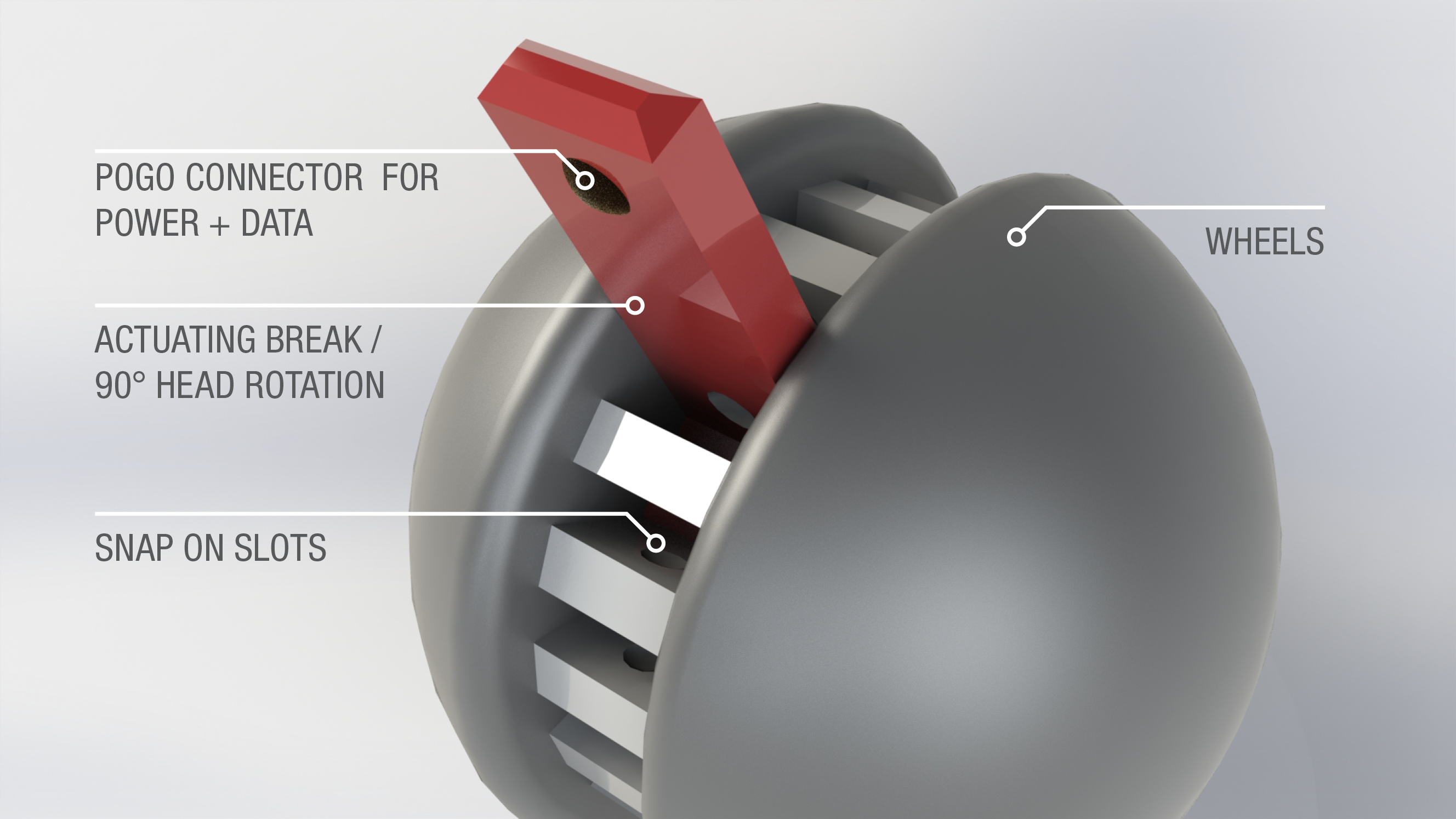
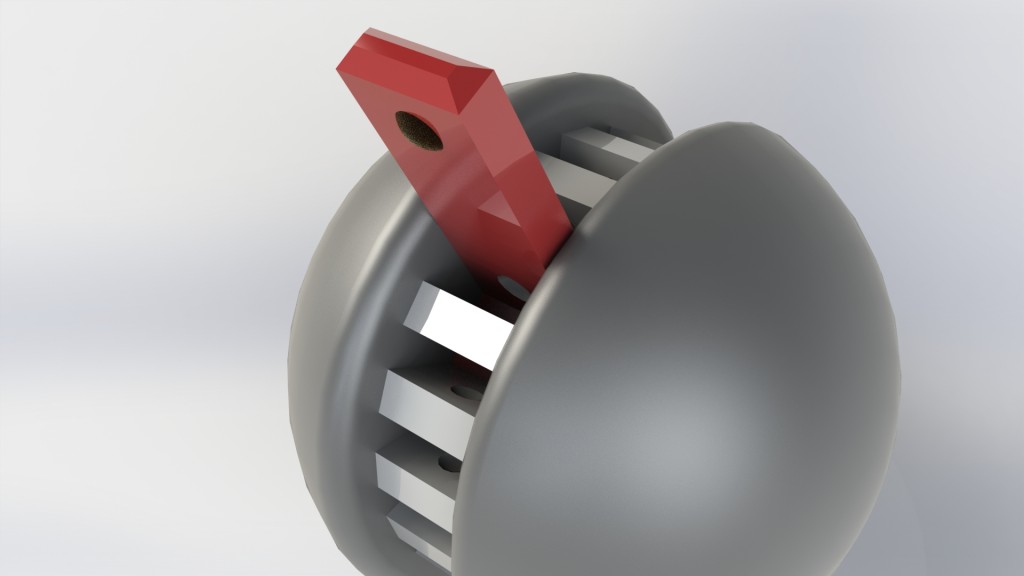
Mobility & Physical linkage
The wheel configuration allows the robot to move quickly around the space. The probe provides physical linkage and also serves as breaking system and provide power, data and structural stability when docking.
Gather energy
The energy is most likely to be supplied externally. The Probe or the “red stick”, would help each modular robots share the energy and recycle the energy from breaking.
Process the raw materials into finished components
This is hard to achieve with the current form and it is difficult in general to make a complete Self-Reproduction system.
There are three major component for this modular robots, the wheel, the center housing, and the probe. Making them out of the raw materials might require more advance structure.
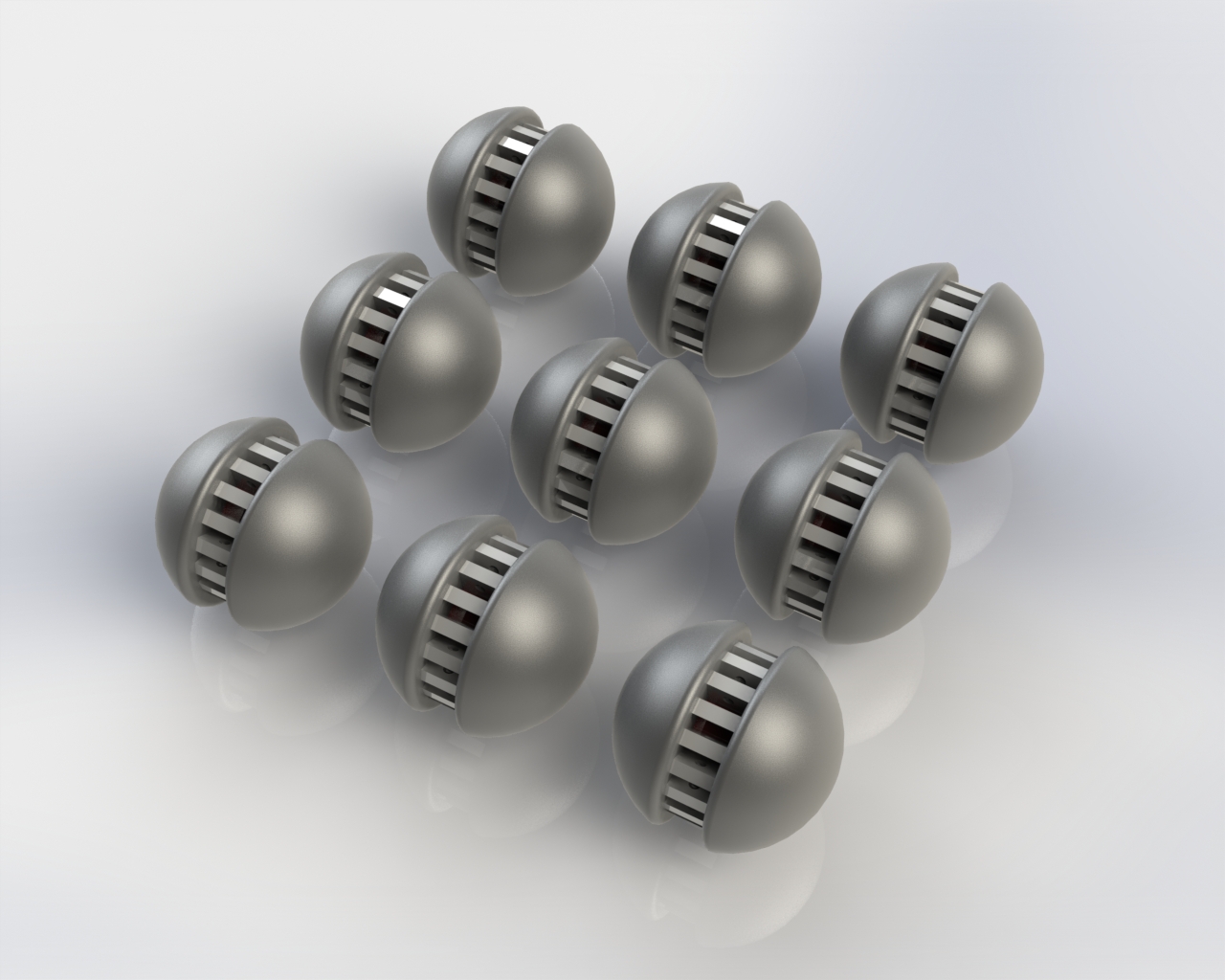
Supply materials
We supplied 3 unassembled modular robots in the field. Each robot would contain power and the data that it is trying to copy. For example, the robot can be in groups of 3 and help finding and assembling 3 more modular robots, then split back to groups of 3.
In this case, the raw materials is a complex structure, but when it’s assembled, it can perform more complex tasks.
Readings for Self-Reproduction
- Theory of Self-Reproducing Automata John Von Neumann, Arthur W. Burks (Ed.); University of Illinois Press, 1966
- Self-reproduction in cellular automata Christopher G. Langton; Physica D: Nonlinear Phenomena; Volume 10, Issues 1-2, January 1984, Pages 135-144
- Toward a viable, self-reproducing universal computer Jean-Yves Perrier, Moshe Sipper, Jacques Zahnd; Physica D: Nonlinear Phenomena; Volume 97, Issue 4, 15 October 1996, Pages 335-352
- Fifty Years of Research on Self-Replication: An Overview Moshe Sipper; Artificial Life; Summer 1998, Vol. 4, No. 3, Pages 237-257
- The Quine Page
- Mechanics of Self-Reproduction L.S. Penrose; Annals of Human Genetics; Volume 23, Issue 1, pages 59-72, September 1958
- Robotics: Self-reproducing machines Victor Zykov, Efstathios Mytilinaios, Bryant Adams & Hod Lipson; Nature; 435, 163-164 (12 May 2005)
- Robotics: Self-replication from random parts Saul Griffith, Dan Goldwater & Joseph M. Jacobson; Nature; 437, 636 (29 September 2005)
- RepRap – the replicating rapid prototyper Rhys Jones, Patrick Haufe, Edward Sells, Pejman Iravani, Vik Olliver, Chris Palmer and Adrian Bowyer; Robotica; Volume 29 / Special Issue 01 / January 2011, pp 177-191
- Minimal self-replicating systems Andrew Robertson, Andrew J. Sinclair and Douglas Philp; Chem. Soc. Rev.; 2000, 29, 141-152
- Minimal self-replicating systems Natasha Paul, Gerald F Joyce; Current Opinion in Chemical Biology; Volume 8, Issue 6, December 2004, Pages 634-639
- Creation of a Bacterial Cell Controlled by a Chemically Synthesized Genome Daniel G. Gibson et al.; Science; Vol. 329, no. 5987, pp. 52-56, 2010
assignment