<<
[ Han - Will ]
Machine: MACRO PICK-AND-PLACE SYSTEM
machines studies
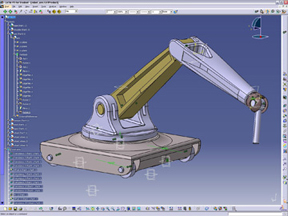

version_01 - robotic arm approach
version_02 - xyz motion - we concluded that this type of movement was the best option for our system

version_03 - xyz motion - tower with centralized horizontal arm - but we needed to eliminate the use of nuts and bolts and concentrate on snap fit connections


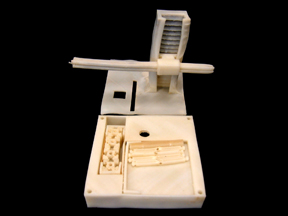
version_04 - xyz motion - offset horizontal arm with printing rods for motion slide - the parts were cut with the laser cuter and snapped together, however, we were still limited by the rods - especially with mass and weight


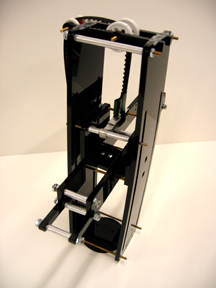
version_05 - xyz motion - towards our final approach - minimize envelope and acutators - we lighten the weight of the overall machine by getting rid of the rods and replaced it with gear belt powered by stepper motors centrally located

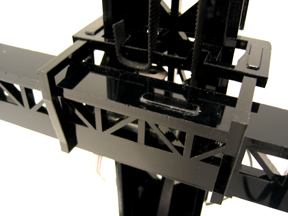
version_06 - xyz motion - with the same concept as version 5, we focused on the overall balance of the machine and its load

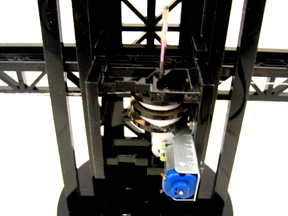
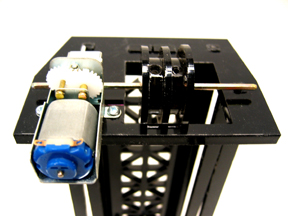
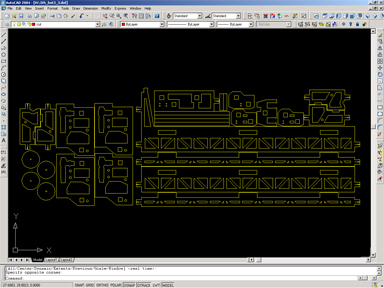
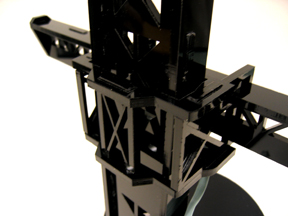
version_07 - xyz motion - we turned to DC motors to minimize size and weight and instead of gear belt, we decided on rotating cranks to lift and pull - locating the motors on top and the center of the tower - the image below shows the final cut sheet for the machine