<<
[ Han - Will ]
Machine: MACRO PICK-AND-PLACE SYSTEM
actuators and motors
We examined several types of motors. Ultimately, we would want to use two primary types, DC and servos. We intended to have the steppers drive the horizontal and vertical loads, because of the accuracy and power it can generate. However, for this process, we turned to DC motors to drive the actual movements. The servos are intended for the actual grabbing motion of the parts and rotating it to the right axis - before we decided to incorporate the hoppers with the arm - as depicted in the animation below of an earlier scheme.
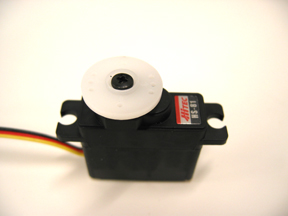

servo motors
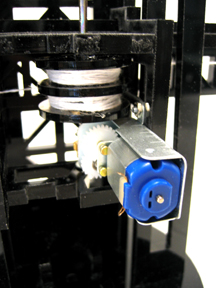
DC motors
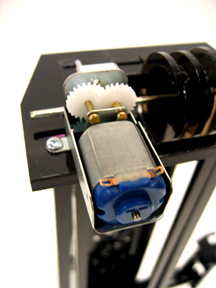
actual movements of the machine