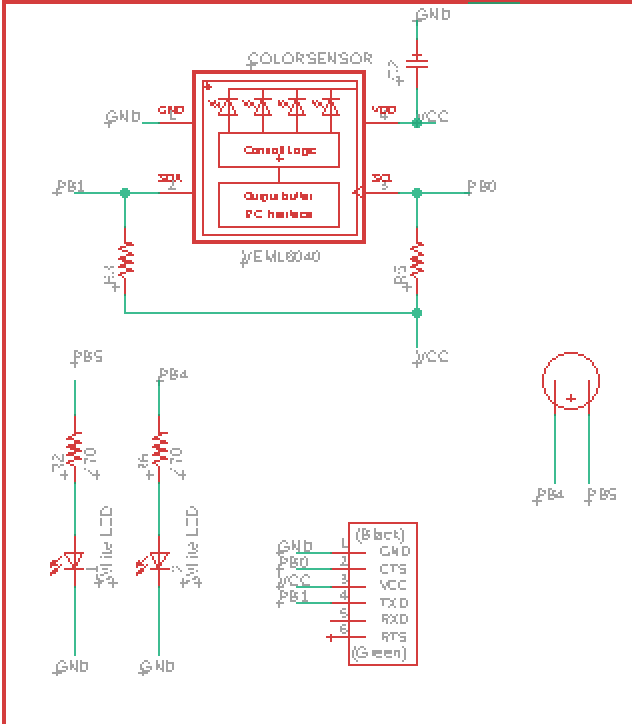
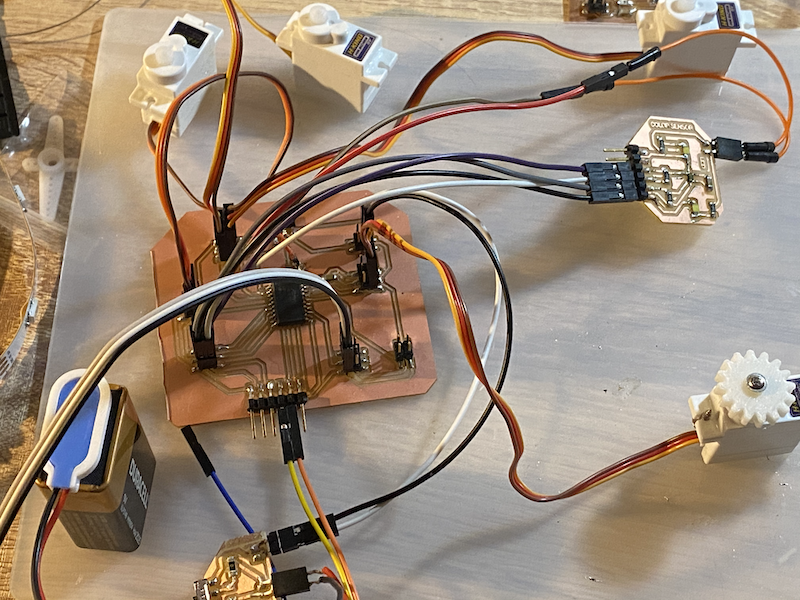
I unfortunately could not make the the full circuit work with the VEML6040 RGBW color sensor mainly due to the fact it operates at 3.3V whereas the servo motors require 5V.
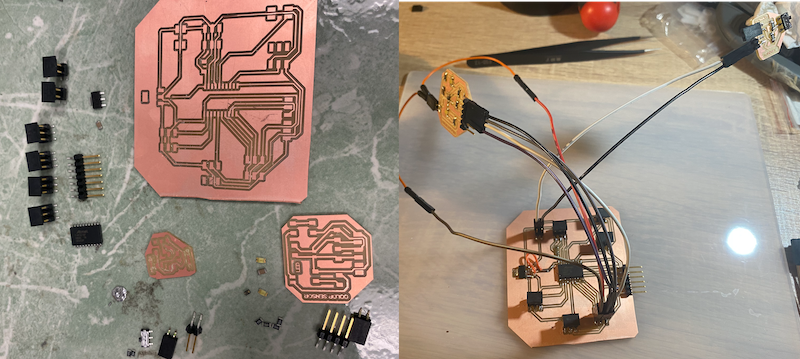
I attempted to create a seperate breakout with a 1amp 3.3V regulator, however the rest of the board did not work. I had to unfortunately ditch the color sensor at the last minute and replaces it with an HC-SR04 ultrasonic sensor which I had readily available.
I pivoted the project to make the servo motors and LED strip react to distance from nearby objects.
Moreover, I had to ditch the battery breakout board as the 9V battery could only power 2 servos + LED strip.
Fortunately, I was able to reprogram my main board to work after the pivot.
In the new setup, the LED stip brightness and angle of movement of servo motors is inversely proportional to the ultrasonic sensor readings.
One issue I faced, as demonstrated in the video, is that I'm getting 'fuzzy' readings (0 and 1149), I tried severak ways to reduce the noise and eventually wrote a script to drop these 2 readings.