MAS.863
How To Make (almost) Anything
I'm Chi-Li Cheng, a first-year student of SMArchS in computation. I am interested in parametric design and robotic fabrication. I plan to design a modularized robotic system, especially for robotic fabrication in architecture with an intuitive interface (maybe in grasshopper) that can facilitate designers.
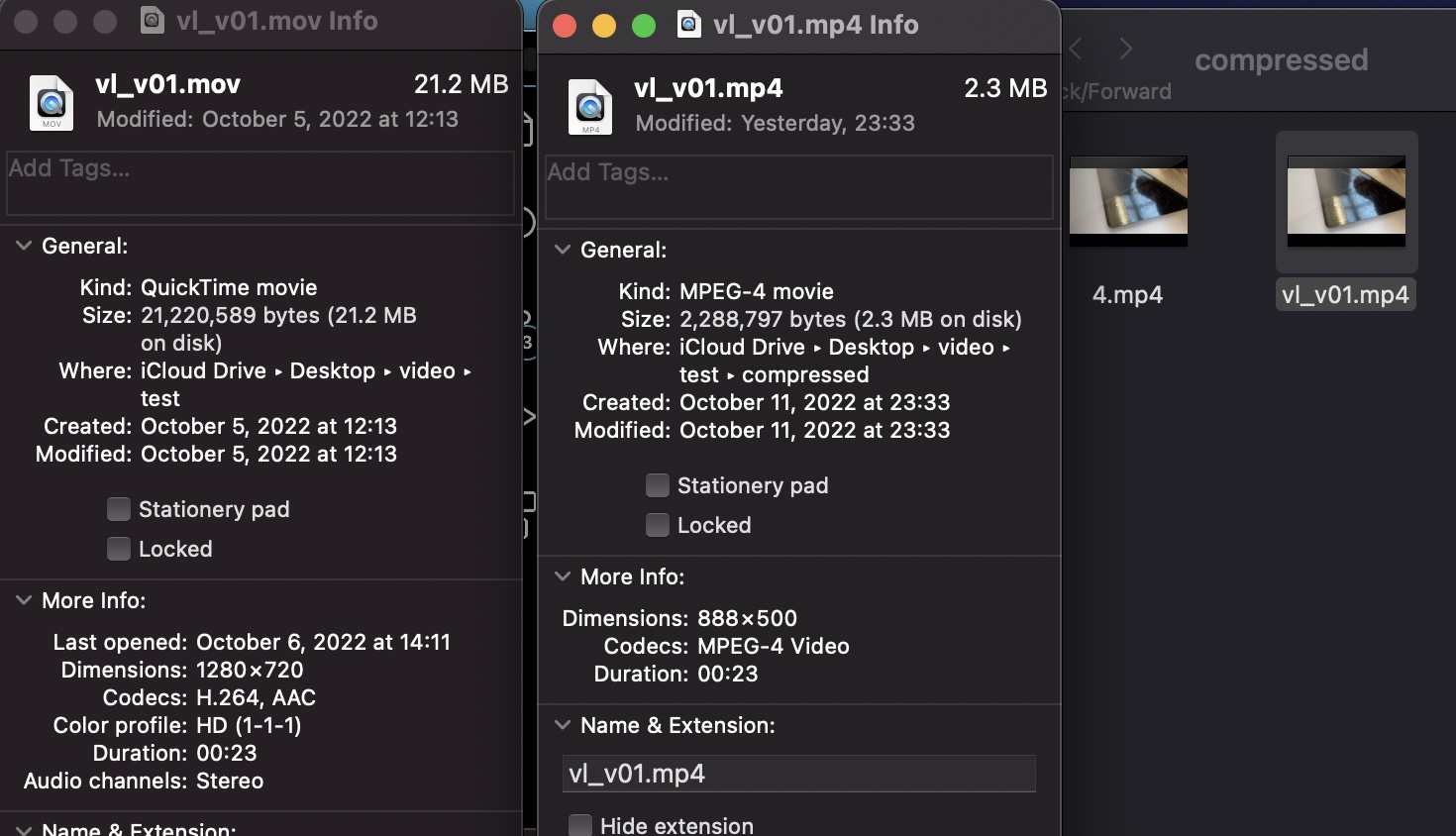
To compression is crucial for Project Management
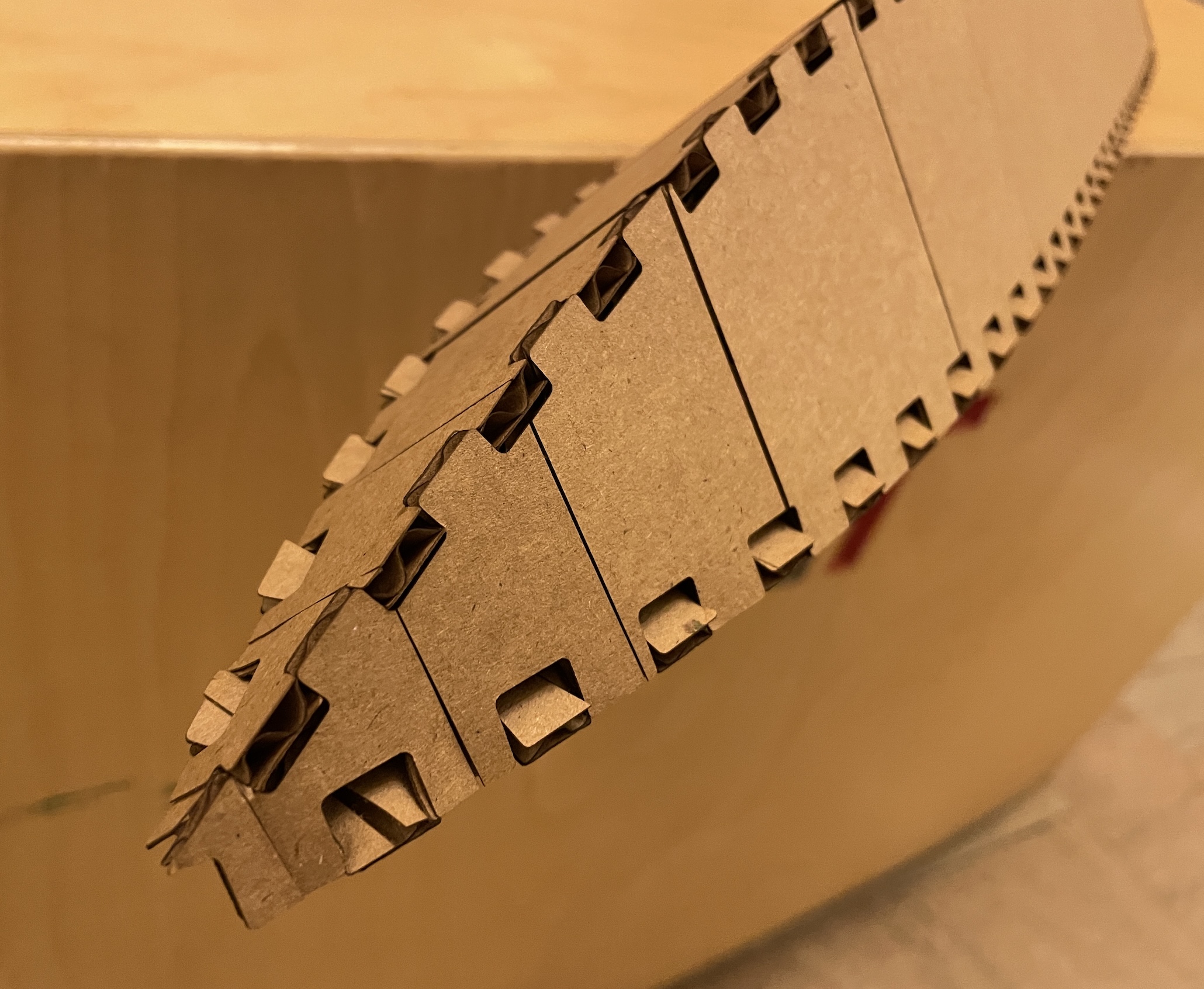
In this week I tried to create curved surfaces with laser cutting and QR code with vyinl cutting.
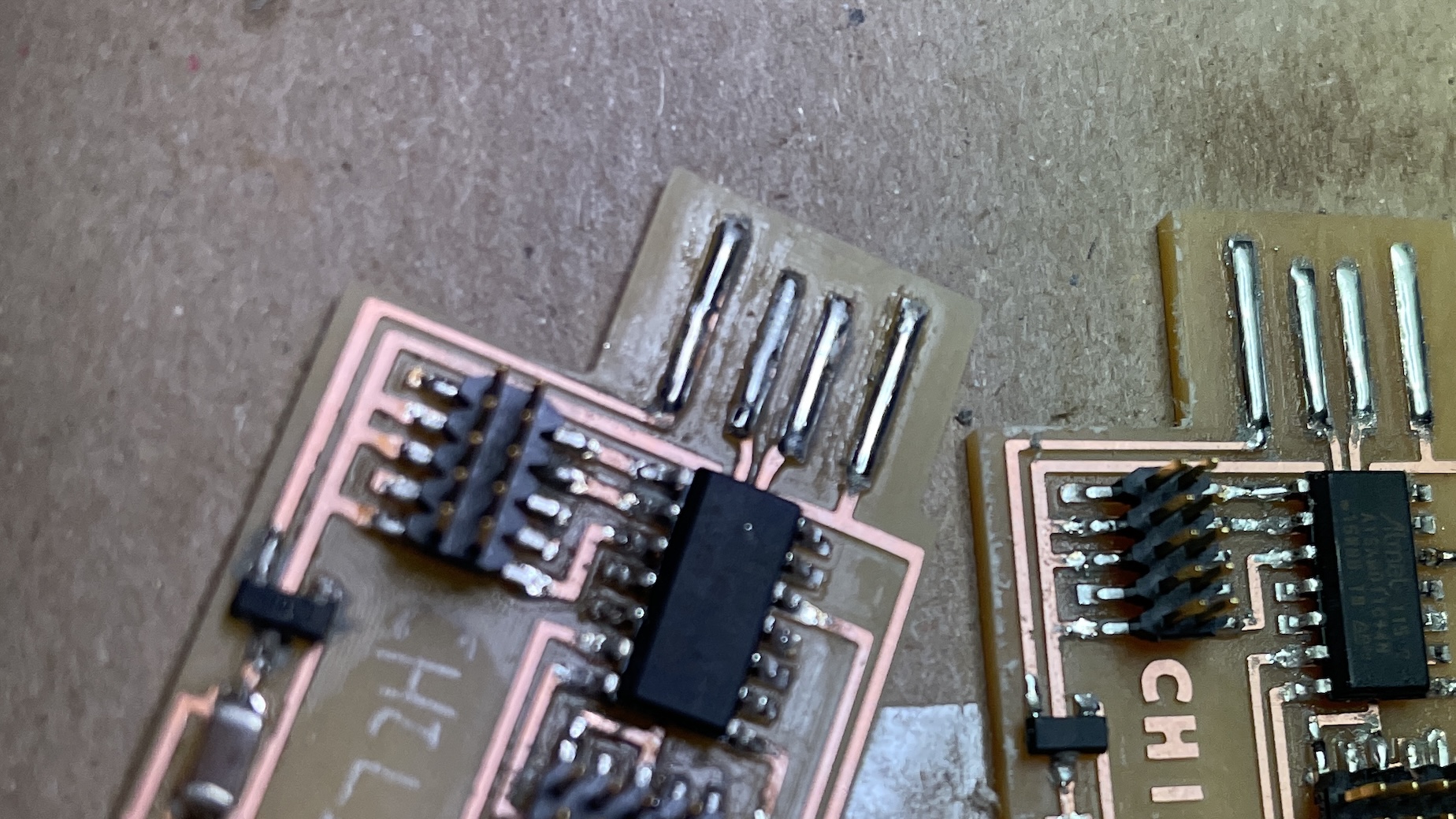
To make PCB, we can use architecture shop's milling machine.

In this week, I tried to test the limitation of 3D pringing. I tested cubes of different angles, but they all works.
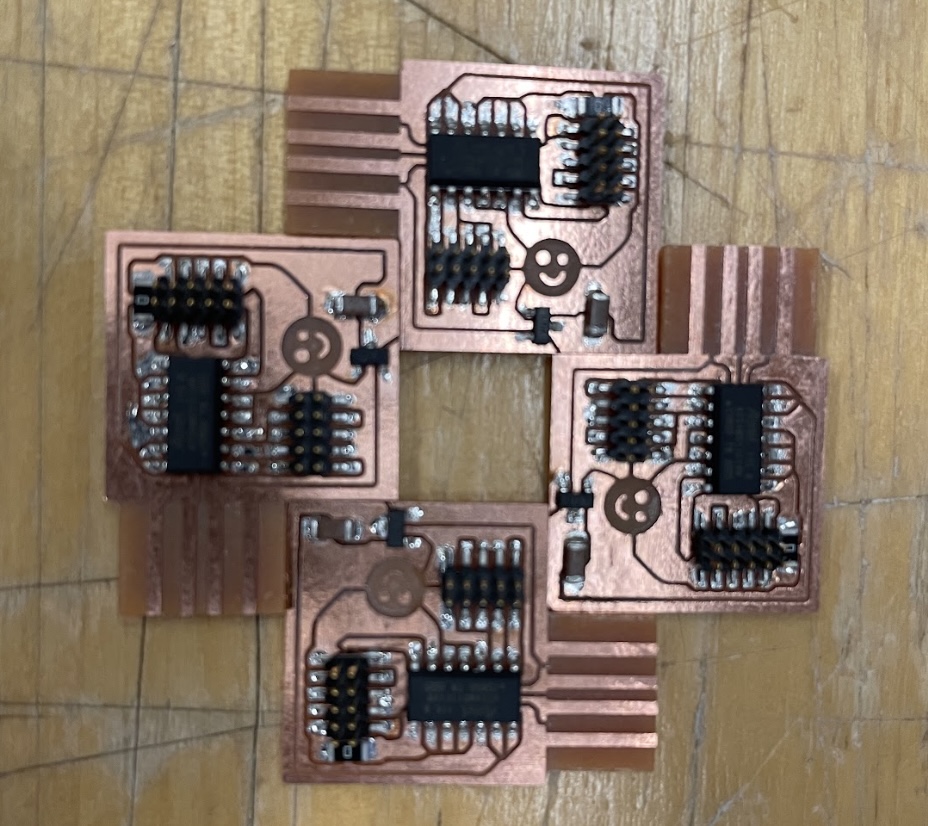
In this week, I learned how to make PCB. Also I found some ways to improve the process.

In this week, I try to design a table with a parametric tool and use CNC to make it.
I try to design a boad that I can use to test the programmer and the bootloader.

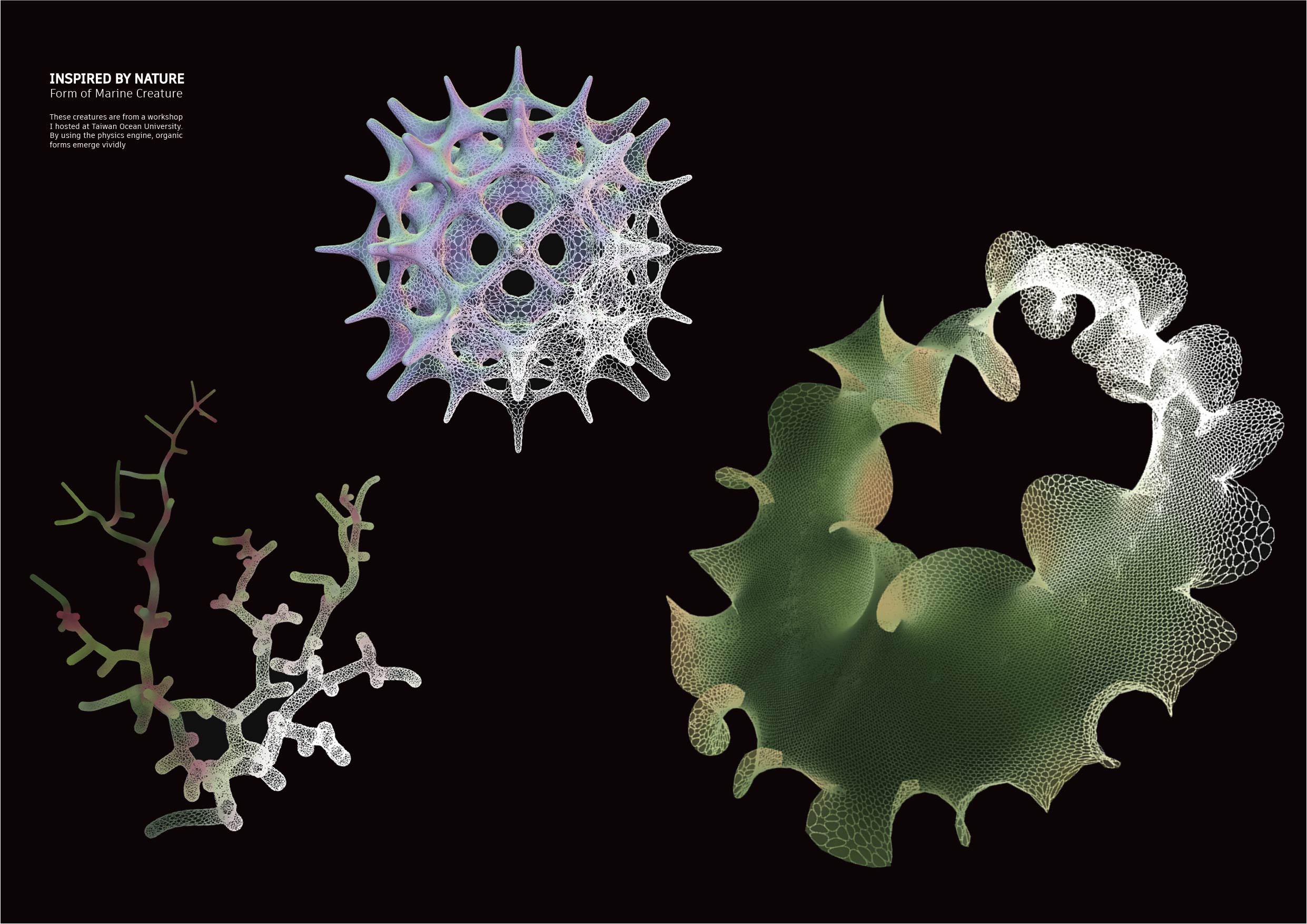
I tried to make a self-assembly toy inspired by a research of self-assembly lab by using grasshopper.
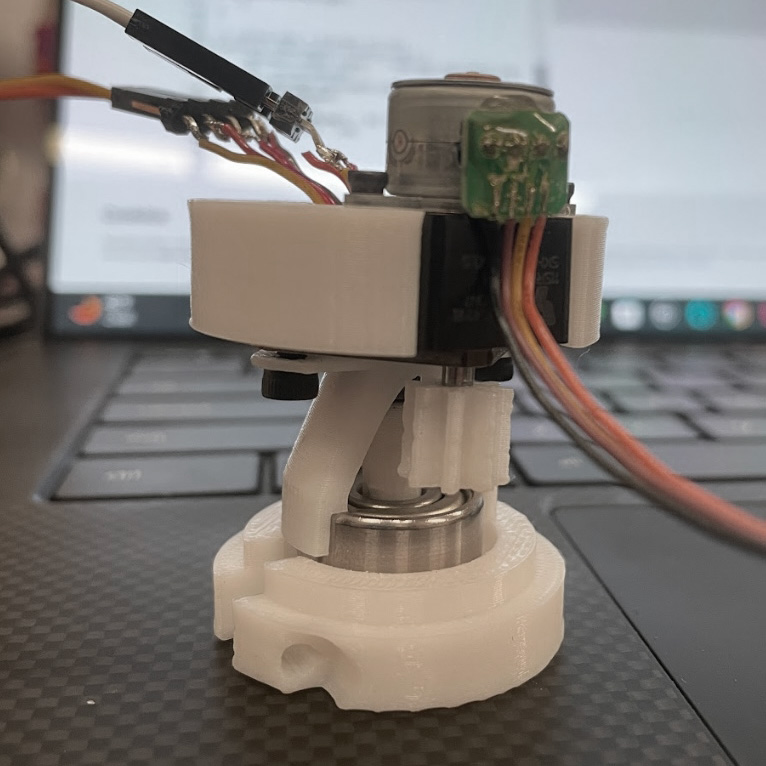
This week, I try to use magnet sensor. I may utilize the sensor for my final project to measure the angle of the robot
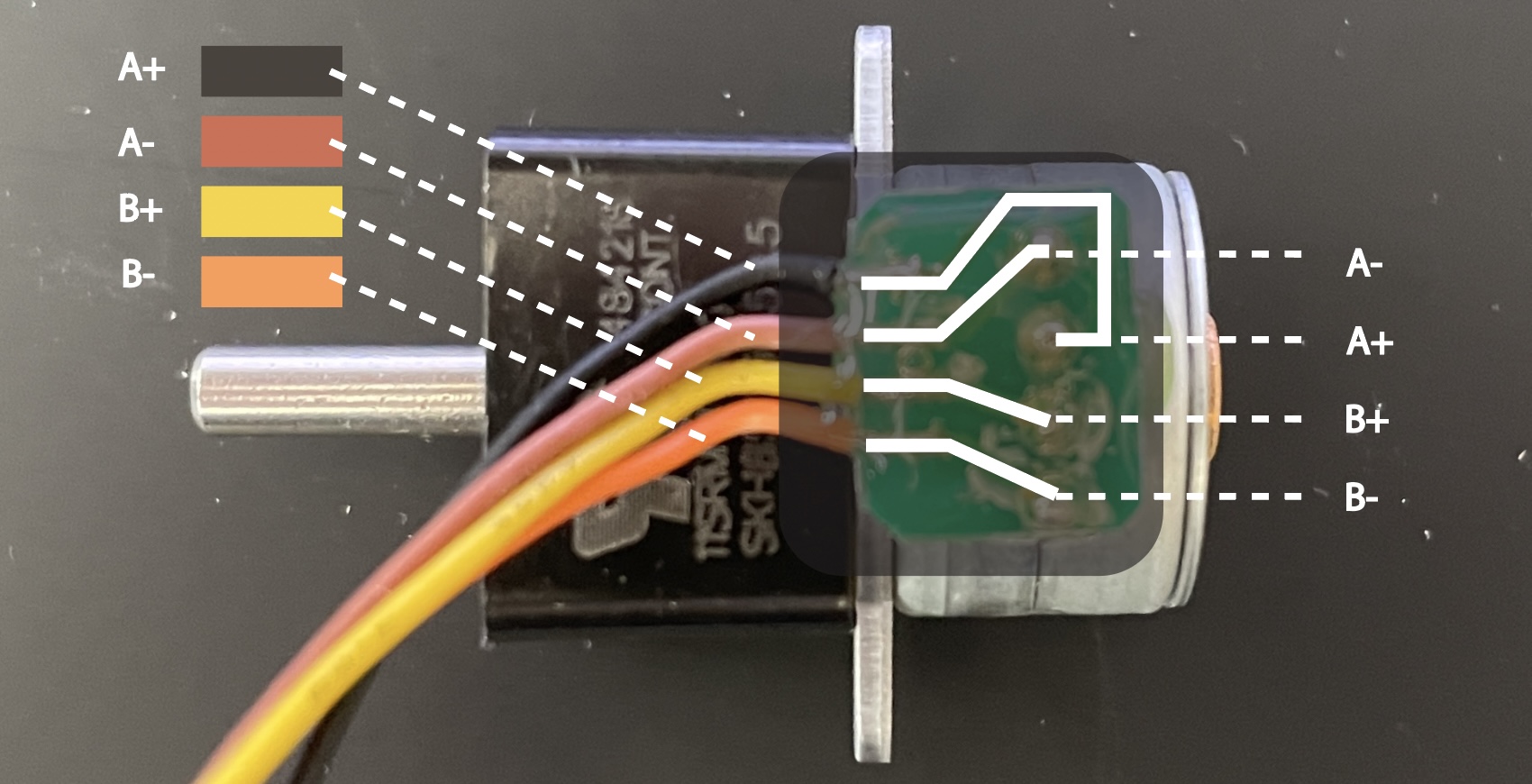
I tried to control small 5V stepper motor with the board for D21E17A I designed.
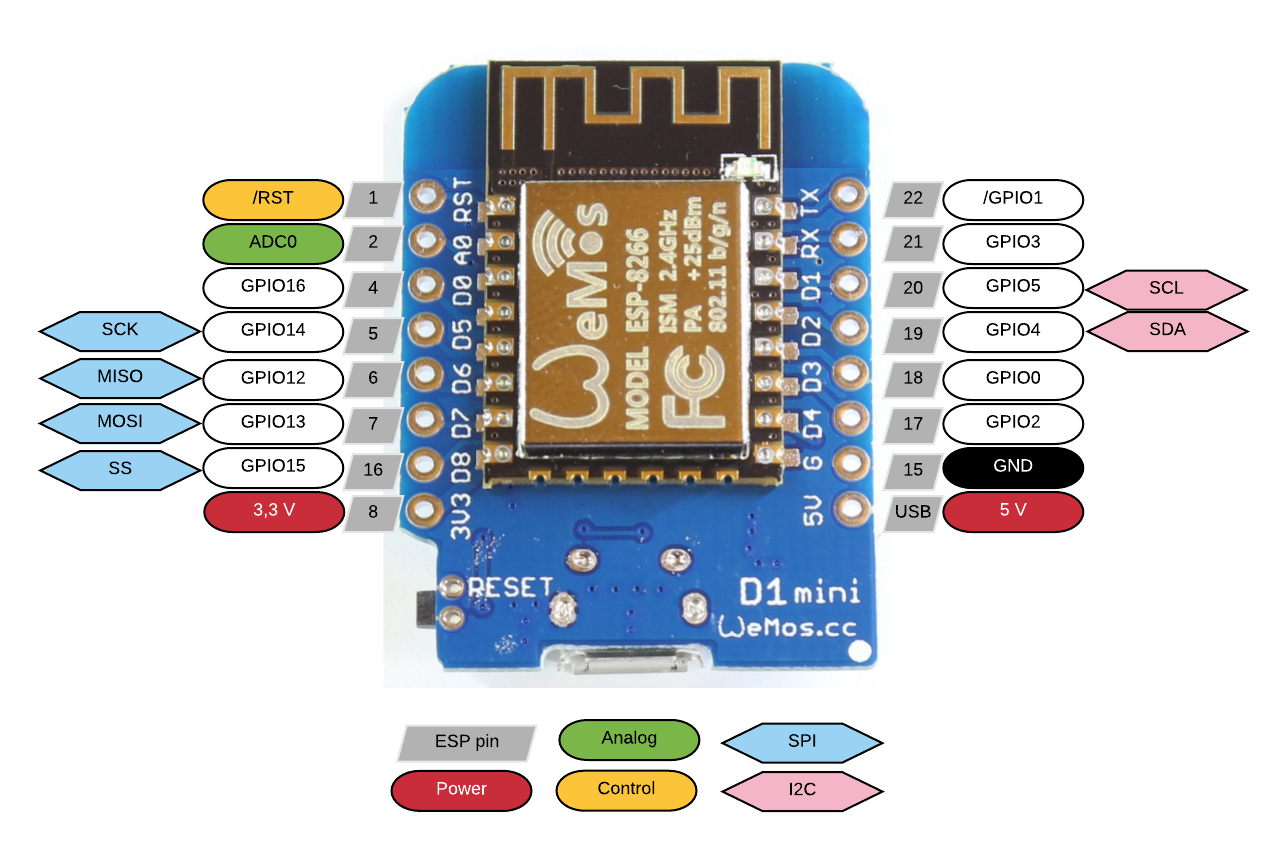
For this week, I test the module esp8266(NodeMCU D1). This will be utilized for my final project to control modularized robot. My plan is to use the wifi module to communicate with the robot controlling interface through MQTT
I tried to utilize MQTT to connect a device(knob) with Rotary Encoder measuring the angle to a website built with p5.js. On the website, there is a simple game: a user can use the device to control the dot on the interface.
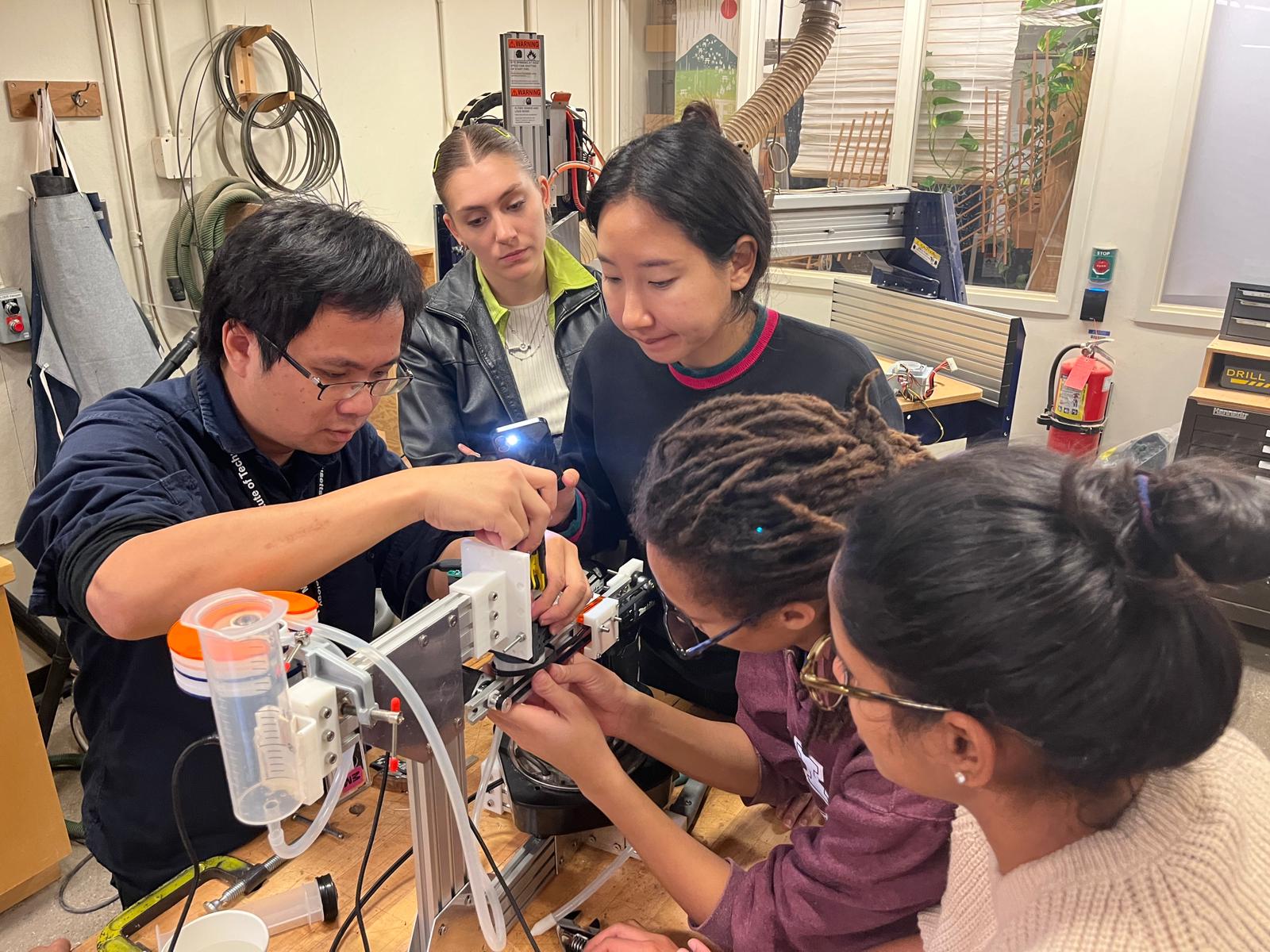
In this week, I contribute to figure out the system and configuration of the pancake. Also Selin and I design and make the peristaltic pump.

In wildcard week, I try to use fancier machines to produce some metal parts to improve my final project. First, I need a heavy enough metal platform to mount my modularized robotic arm for the final project. Second, the robotic arm requires stronger gears. In my previous test, the 3D-printed gears wear out too fast; also, the precision is not ideal. Hence, I asked David for help. Thanks to him, I got EDM-cut gears.
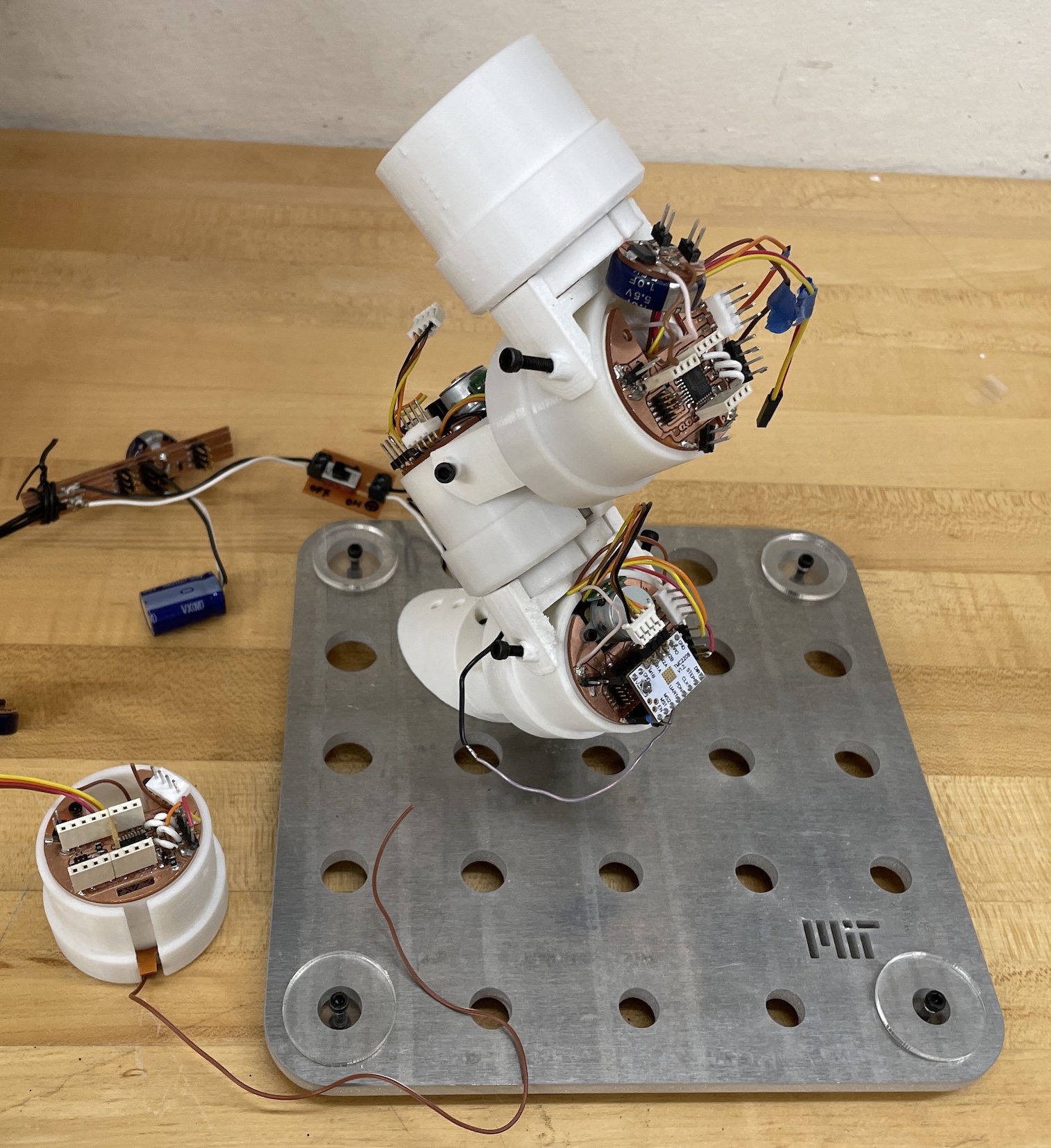
In the design field, designers are looking for a more intuitive way to use robots. In order to meet the need, I decided to develop a modularized versatile robotics system with a parametric design interface and visualization. The robot system may need to be aware of the current configuration when a user assembles some modules. I would use the IoT method to design the robot system; the interface can visualize and control the robot modules in real-time.