Week 03: Embedded Programming
Individual Assignment:
This week, I walked through learned how to use the Seeed XIAO RP2040 microcontroller board, and programmed it to communicate remotly
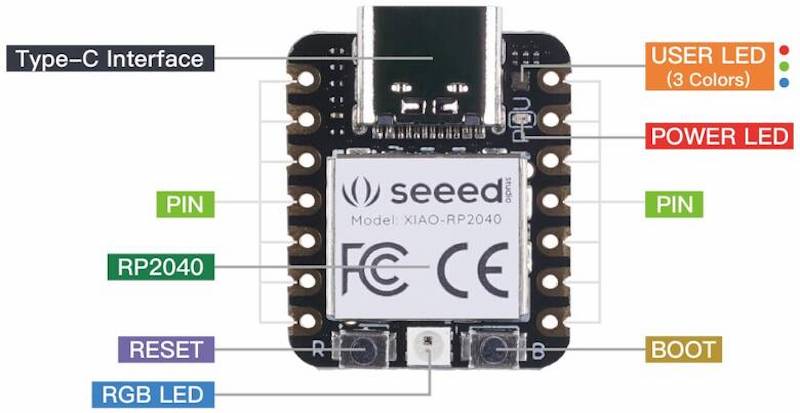
1. Browsed the data sheet for the microcontroller
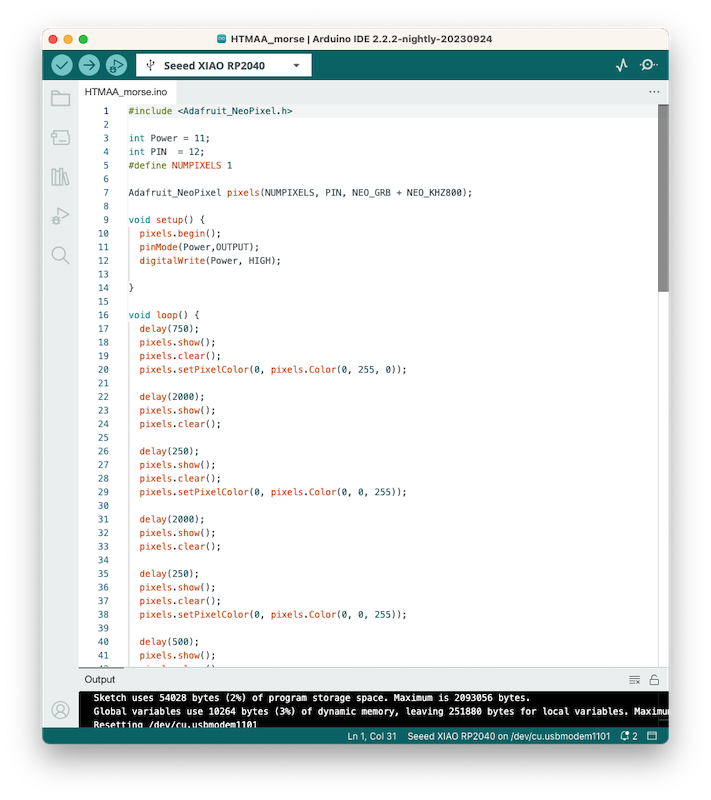
2. Downloaded the Arduino IDE and connected the microcontroller
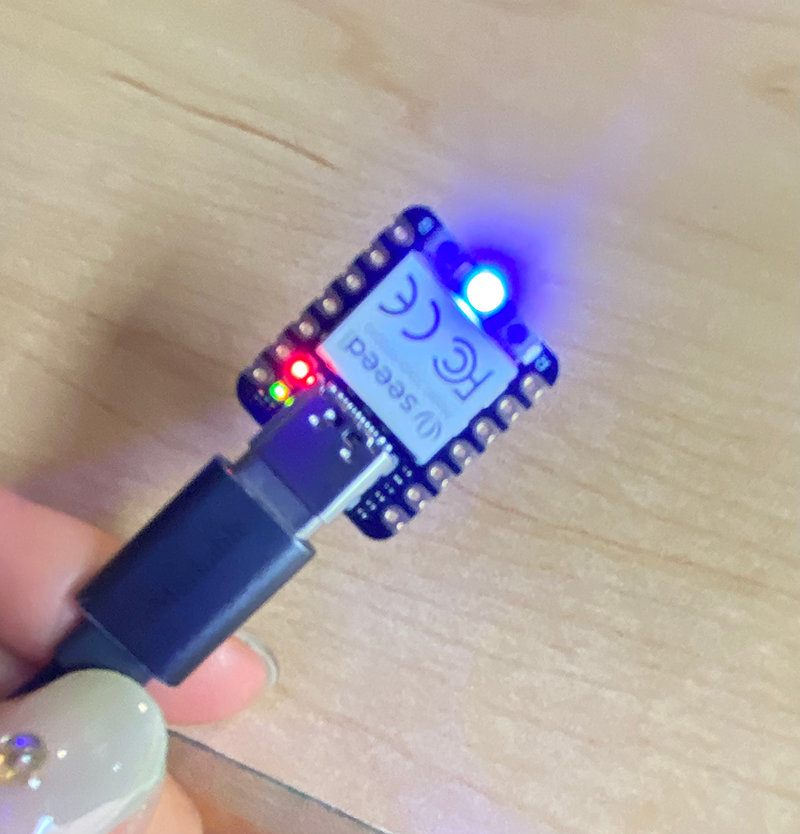
3. Use the Blink example in the library to test blink the microcontroller
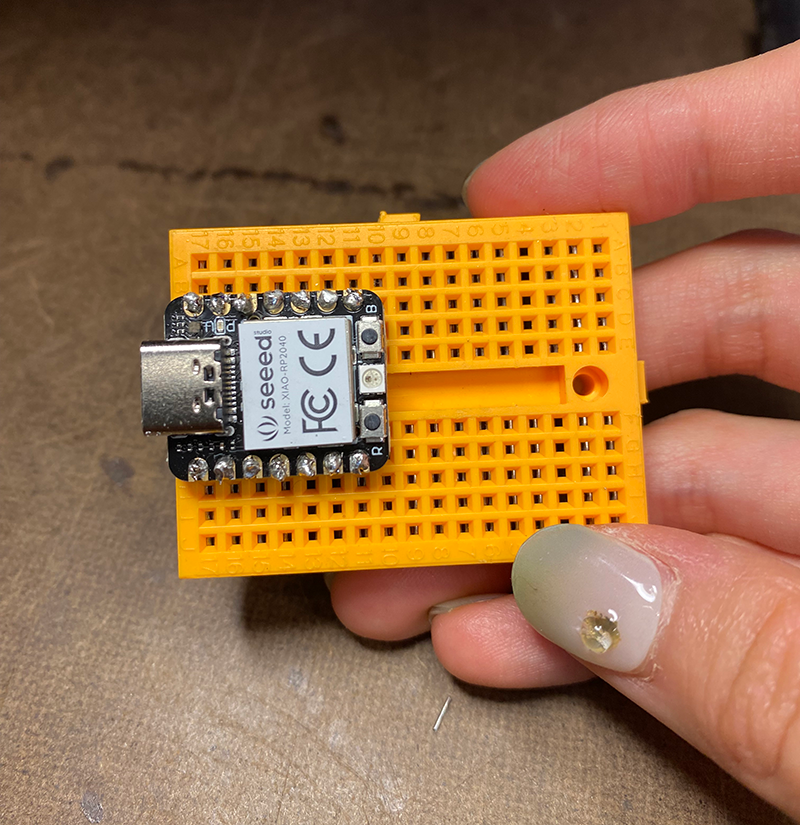
4. I soldered the microcontroller into a cute tiny breadboard
5. I connected a small 1"x.5" OLED screen to the controller and test run it
To run OLED with the RP2040, I referred to the tutorial provided at wiki.seedstudio.com
link to the tutorial
6. I integrated a joystick and created a simple a pong game
#include
#include
#include
Adafruit_SSD1306 myDisplay(128, 64, &Wire);
int paddleX; // X-coordinate of the paddle
int paddleY; // Y-coordinate of the paddle
int paddleWidth = 20;
int paddleHeight = 5;
int ballX; // X-coordinate of the ball
int ballY; // Y-coordinate of the ball
int ballSpeedX = 1; // Ball's horizontal speed
int ballSpeedY = 1; // Ball's vertical speed
int joystickXPin = A0; // Analog pin for joystick X-axis
int joystickYPin = A1; // Analog pin for joystick Y-axis
void setup() {
myDisplay.begin(SSD1306_SWITCHCAPVCC, 0x3C);
paddleX = 54; // Initial paddle position
paddleY = 56; // Initial paddle position
ballX = 64; // Initial ball position
ballY = 32; // Initial ball position
}
void loop() {
myDisplay.clearDisplay();
// Read joystick values for paddle control
int joystickX = analogRead(joystickXPin);
paddleX = map(joystickX, 0, 1023, 0, 108);
// Ensure the paddle stays within the screen boundaries
paddleX = constrain(paddleX, 0, 108);
// Update ball position
ballX += ballSpeedX;
ballY += ballSpeedY;
// Check for ball collisions with screen edges
if (ballX <= 0 || ballX >= 127) {
ballSpeedX = -ballSpeedX;
}
if (ballY <= 0 || ballY >= 63) {
ballSpeedY = -ballSpeedY;
}
// Check for ball collision with paddle
if (ballY >= paddleY && ballY <= paddleY + paddleHeight &&
ballX >= paddleX && ballX <= paddleX + paddleWidth) {
ballSpeedY = -ballSpeedY;
}
// Draw paddle and ball
myDisplay.fillRect(paddleX, paddleY, paddleWidth, paddleHeight, WHITE);
myDisplay.fillCircle(ballX, ballY, 3, WHITE);
myDisplay.display();
delay(10); // Adjust the delay for game speed
}
The code above is developed with the help of ChatGPT
With my group, I compared the Ardunio IDE "Blink" example running on the RP2040 to an equivalent MicroPython code running on a virtual microcontroller.