Machine Week
The EECS team sets out to build a shot-bot! I mean.. a Barduino.
My responsibilities were on the stepper team. I ordered the parts, helped prototype the electronic controllers for the pumps, cut acrylic for the top platform where the modules are, and handled system integration between UI and the machine.
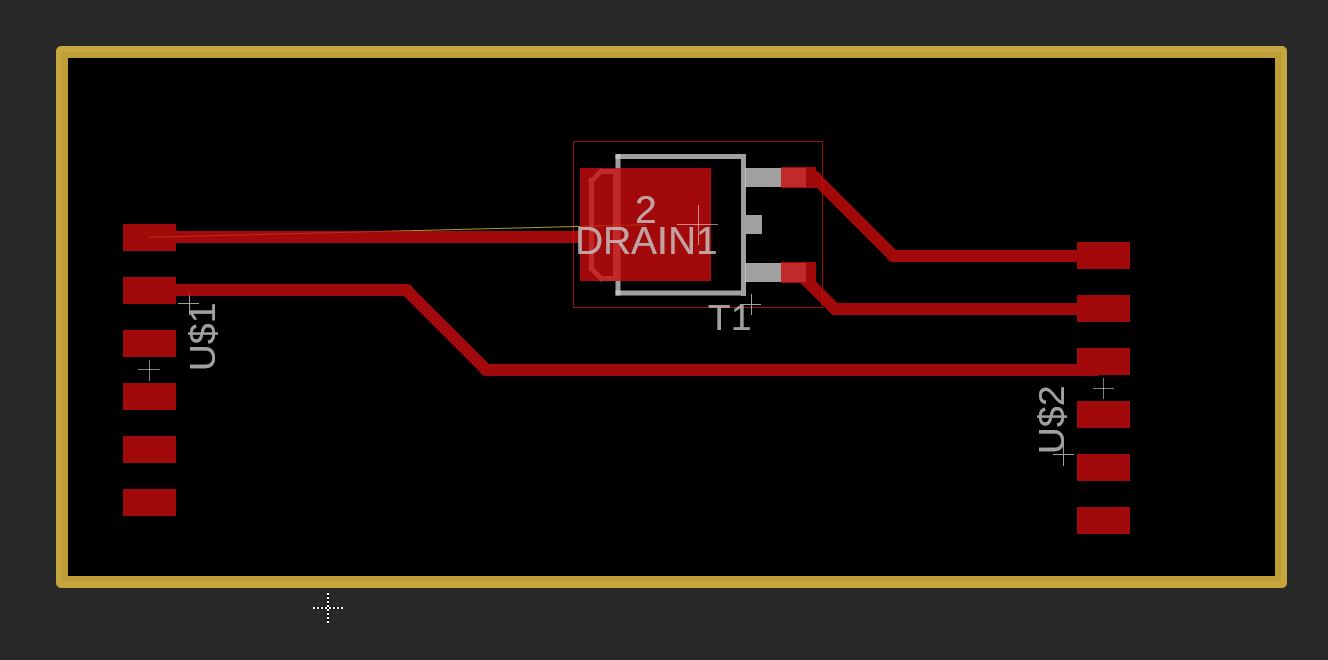
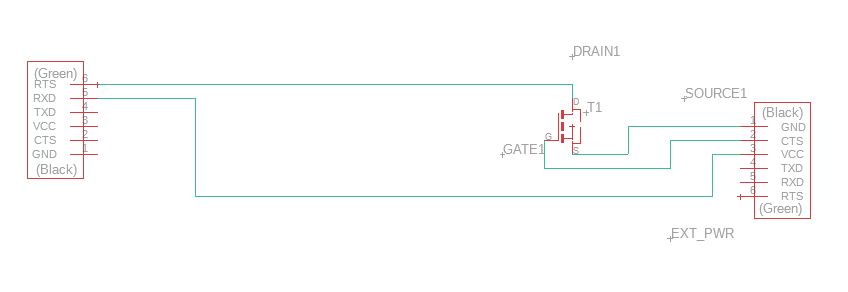
MOSFET designs for pump motors:
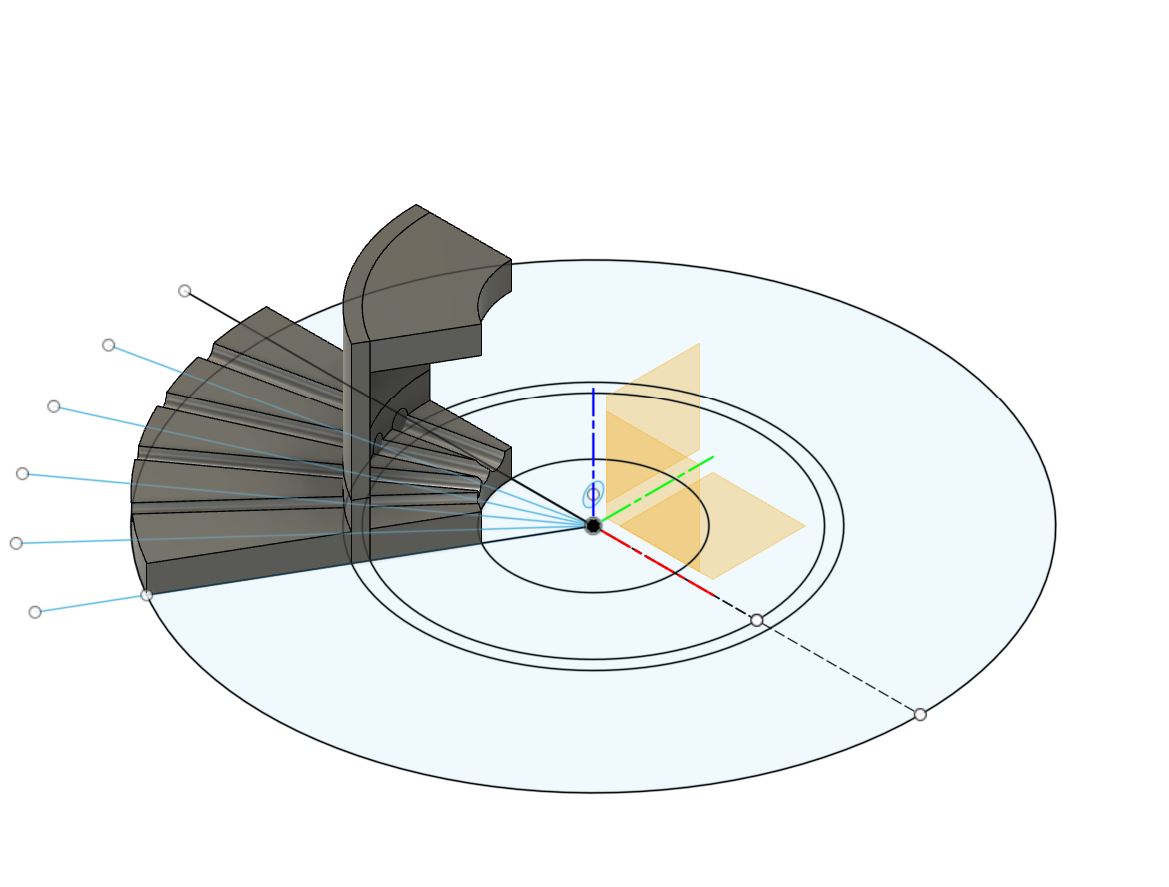
Design for module holders:
The code works by first loading within the RP2040 code that listens through a serial port for instructions, and rotates/pumps accordingly. This allows all the computation to be done by the server, not the RP2040.
The server, based on the user’s input, figures out the best way to spin and pump drinks. Over the serial connection, the server instructs the RP2040.