BRAINROT 9000
The HTMAA 2025 EECS Machine takes its inspiration from two terrors of tech in pop culture: the evil authoritarian Dalek of the Doctor Who universe and the ubiquitous Brain Rot of the contemporary social media era.
The BRAINROT 9000 is a Dalek-shaped autonomous robot that identifies human targets and drives towards them, automatically scrolling and passively amplifying overstimulating but vacuous "brain rot" social media content.
IDEATION
We conducted meetings to ideate the robot on Tuesday 11th and Wednesday 12th of November. Our inspirations included:
Roomba-like movement
Anti-productivity target following
Physical auto-scroll
Dalek exterior
Anti-productivity target following
Physical auto-scroll
Dalek exterior
DESIGN
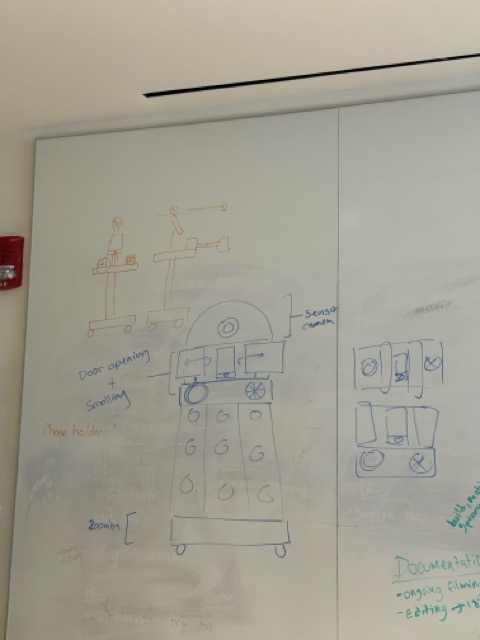
Our design process considered how to align the form and functionality of the original Dalek with the capabilities of the BRAINROT 9000.
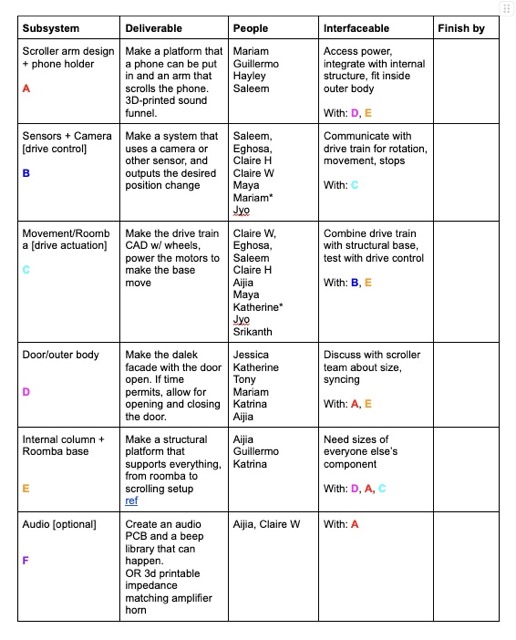
We arrived at the following subsystems:
Auto-scroller arm and phone amplifier
Drive sensing and control
Drive actuation
Dalek exterior
Dalek chassis and internal structure
Drive sensing and control
Drive actuation
Dalek exterior
Dalek chassis and internal structure
Subteams worked in parallel and collaborated using our shared Fusion cloud and GitLab repo.
CONSTRUCTION
The BRAINROT 9000 utilizes structural components of acrylic and aluminum with laser cut cardboard layers and sheathing.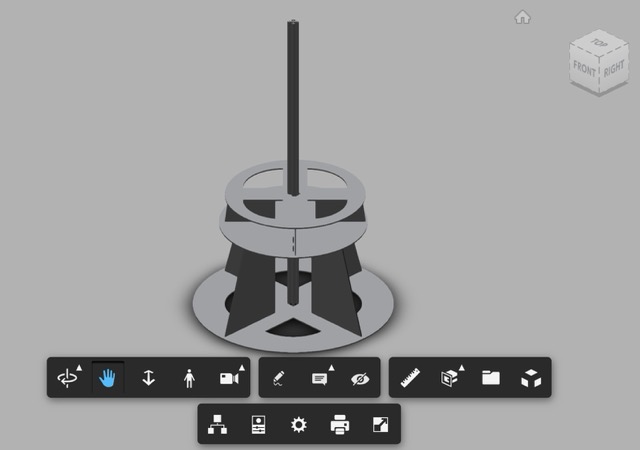
The interior structure uses an aluminum column surrounded by laser-cut cardboard bases at three levels. Vertical cardboard supports with tabs reinforced stability.
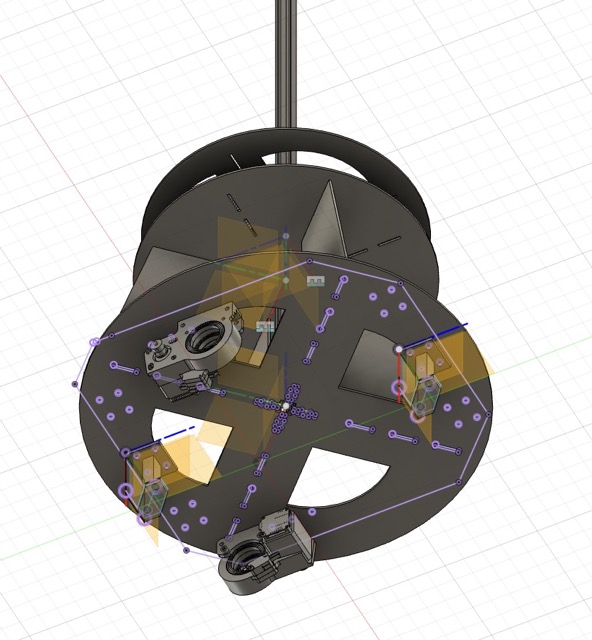
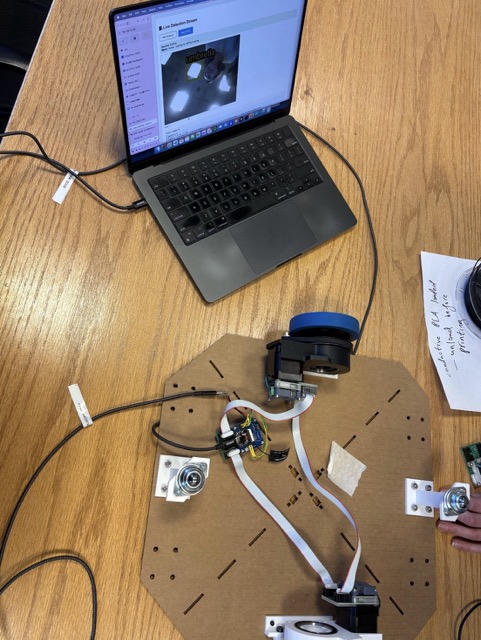
The laser-cut acrylic chassis holds two stepper motors on rotary axes and two rolling castors on 3D printed adapters.

The interior structure slots onto the chassis using simple joints.
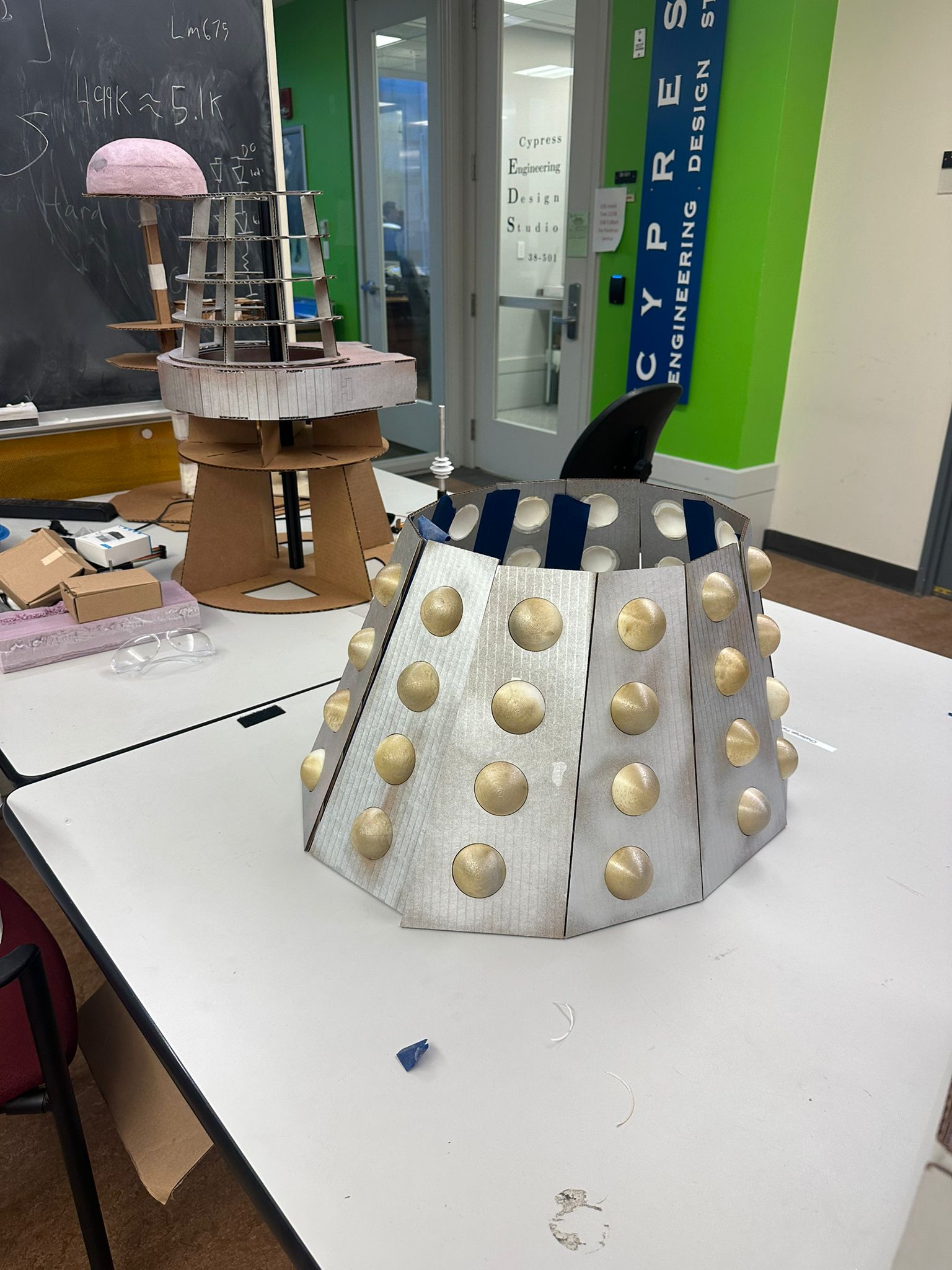
The interior and chassis are shielded by the "armor" exterior of the Dalek body, which is made of laser-cut cardboard and 3D printed studs and a foam dome, then spray-painted.
Specifically, the cardboard pieces were designed in Fusion, and consisted of a base of trapezoids of similar but varying sizes; an arms holder; a parametrically-fitted middle, and a foam dome top.
For more on design: Mariam!
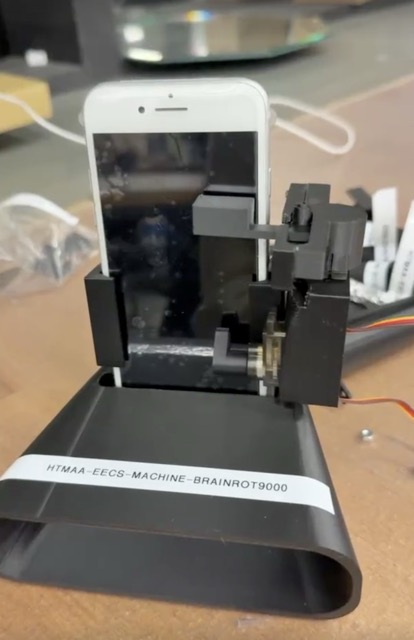
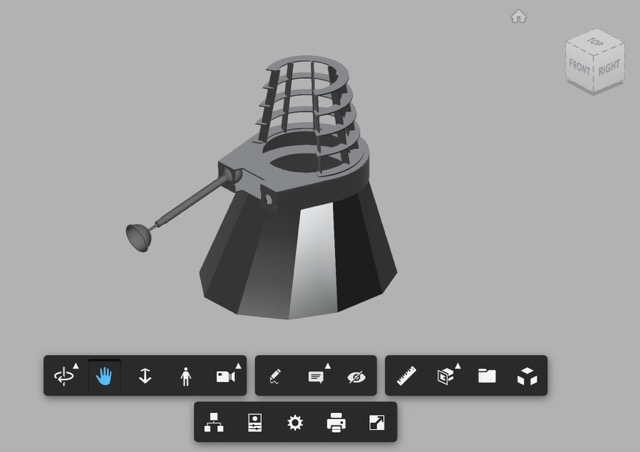
Inside the head of the Dalek is a 3D printed assembly that holds an iPhone, passively amplifies its sound, and scrolls it automatically using a servo-controlled arm. The scrolling arm is specifically printed with conductive PLA so that the capacitive touch screen will respond.
For more on scroll: Saleem!
PROGRAMMING
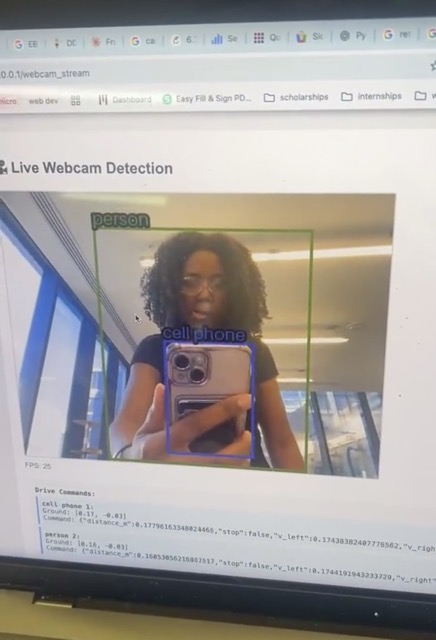
Programming the navigation behavior of the BRAINROT 9000 required a system that senses images through a XIAO ESP32 S3 Sense camera module, uses a lightweight YOLO model to identify bounding boxes of humans, and drives the robot towards those bounding boxes.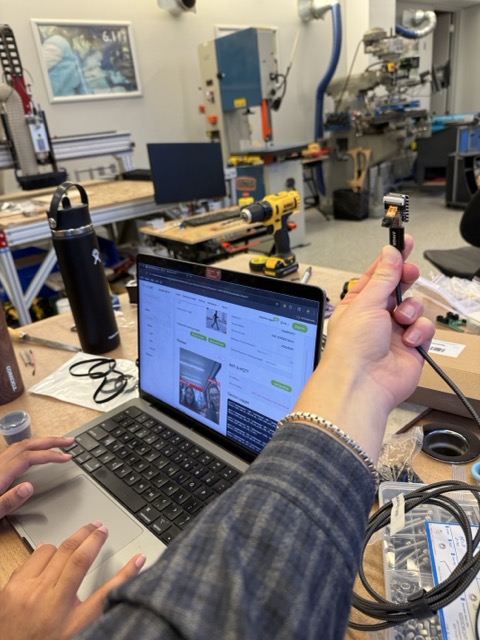
This was completed using a Flask server that receives posted images from the ESP32, detects bounding boxes, and then returns driving instructions to the ESP32.
The Flask server is written in Python and run from a laptop, and the ESP32 communicates with it remotely through a flashed Arduino sketch. That Arduino sketch uses SerCAT commands to drive the motors.
Special thank you to Quentin for making us a special new board so that we could drive our motors from the ESP32 (bypassing the Teensy we originally had for this purpose).
For more on drive: GitLab!